Emax Tinyhawk 2, le test
 La famille Tinyhawk compte désormais 4 membres, le Tinyhawk original (voir le test ici), le TinyhawkS (voir le test là), le Tinyhawk Freestyle, et ce Tinyhawk II. Le Tinyhawk II ressemble beaucoup à TinyhawkS, il est également à la fois 1S et 2S. Que vaut le dernier-né ? Réponse dans cette chronique. Notez que le Tinyhawk II nous a été donné par la boutique Banggood. Comme d’habitude, dites-nous si vous pensez que la pratique a influencé notre jugement.
La famille Tinyhawk compte désormais 4 membres, le Tinyhawk original (voir le test ici), le TinyhawkS (voir le test là), le Tinyhawk Freestyle, et ce Tinyhawk II. Le Tinyhawk II ressemble beaucoup à TinyhawkS, il est également à la fois 1S et 2S. Que vaut le dernier-né ? Réponse dans cette chronique. Notez que le Tinyhawk II nous a été donné par la boutique Banggood. Comme d’habitude, dites-nous si vous pensez que la pratique a influencé notre jugement.
Pour comparer le Tinyhawk II à d’autres nano racers, consultez le tableau des appareils qui ont été testés sur Helicomicro, ici (de préférence avec les navigateurs Chrome ou Firefox).
La vidéo
Tour du propriétaire
 Le Tinyhawk II repose sur une structure en plastique très fin, mais thermoformé pour être résistant. Elle est très semblable à celle du TinyhawkS, mais avec des arceaux renforcés, des protections d‘hélices plus épaisses. Le plot central est muni de deux charnières pour fixer le carénage de la caméra. Cette méthode permet de modifier l’orientation de la caméra, ce qui n’était pas possible sur les précédents Tinyhawk. Les hélices sont des quadripales de 4 cm de diamètre, les Turtlemode de Emax. Elles sont entrainées par des moteurs brushless 0802 à 16000KV. Un peu plus puissants, donc, que les 0802 à 15500V du TinyhawkS. Ils sont placés à l’envers, face vers le sol.
Le Tinyhawk II repose sur une structure en plastique très fin, mais thermoformé pour être résistant. Elle est très semblable à celle du TinyhawkS, mais avec des arceaux renforcés, des protections d‘hélices plus épaisses. Le plot central est muni de deux charnières pour fixer le carénage de la caméra. Cette méthode permet de modifier l’orientation de la caméra, ce qui n’était pas possible sur les précédents Tinyhawk. Les hélices sont des quadripales de 4 cm de diamètre, les Turtlemode de Emax. Elles sont entrainées par des moteurs brushless 0802 à 16000KV. Un peu plus puissants, donc, que les 0802 à 15500V du TinyhawkS. Ils sont placés à l’envers, face vers le sol.
Suite du tour
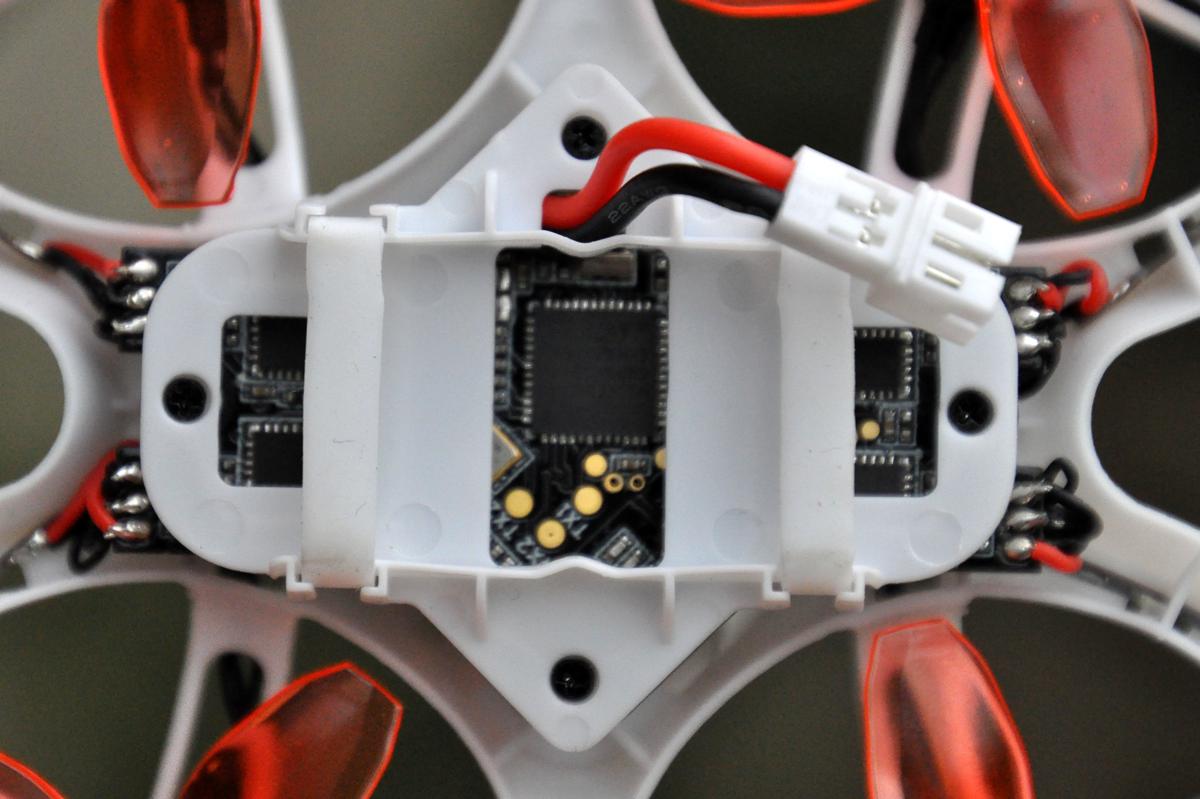 Le contrôleur de vol repose sur un processeur F4, flashé avec Betaflight en firmware MATEKF411RX). Il est couplé à un ESC 4 en 1 de 5A BLheli_S, et comprend un récepteur intégré SPI compatible avec le protocole FrSky D8, avec une antenne assez longue. Le contrôleur de vol est un peu plus long que celui du TinyhawkS : il est équipé de contacteurs pour alimenter 4 bandeaux de LED glissés dans les protections d’hélices. Les moteurs sont toujours branchés avec des connecteurs, ce qui permet en théorie de les changer rapidement. Pas tant que cela, tout de même, puisqu’il faut retirer la pièce plastique de support de la batterie et retourner le contrôleur de vol.
Le contrôleur de vol repose sur un processeur F4, flashé avec Betaflight en firmware MATEKF411RX). Il est couplé à un ESC 4 en 1 de 5A BLheli_S, et comprend un récepteur intégré SPI compatible avec le protocole FrSky D8, avec une antenne assez longue. Le contrôleur de vol est un peu plus long que celui du TinyhawkS : il est équipé de contacteurs pour alimenter 4 bandeaux de LED glissés dans les protections d’hélices. Les moteurs sont toujours branchés avec des connecteurs, ce qui permet en théorie de les changer rapidement. Pas tant que cela, tout de même, puisqu’il faut retirer la pièce plastique de support de la batterie et retourner le contrôleur de vol.
Fin du tour
 La prise d’alimentation est un unique PST PH2.0 – pour mémoire il y avait sur le TinyhawkS une PST PH2.0 pour les batteries 1S et une JST rouge pour les 2S. Sur le Tinyhawk II, cette prise PST PH2.0 sert à la fois pour les batteries 1S et 2S. La caméra à bord de l’appareil est une RunCam Nano 2 700TVL. Elle est reliée à un petit émetteur vidéo 5,8 GHz. Petit, mais capable d’émettre à 25 mW (le maximum autorisé en France), 100 mW et 200 mW, pilotable via Smartaudio. Il est équipé d’une antenne dipôle qui dépasse à peine du carénage, et d’un bouton de contrôle facilement accessible. Sans batterie, le Tinyhawk II pèse 31,3 grammes (pour 29,2 grammes pour le TinyhawkS).
La prise d’alimentation est un unique PST PH2.0 – pour mémoire il y avait sur le TinyhawkS une PST PH2.0 pour les batteries 1S et une JST rouge pour les 2S. Sur le Tinyhawk II, cette prise PST PH2.0 sert à la fois pour les batteries 1S et 2S. La caméra à bord de l’appareil est une RunCam Nano 2 700TVL. Elle est reliée à un petit émetteur vidéo 5,8 GHz. Petit, mais capable d’émettre à 25 mW (le maximum autorisé en France), 100 mW et 200 mW, pilotable via Smartaudio. Il est équipé d’une antenne dipôle qui dépasse à peine du carénage, et d’un bouton de contrôle facilement accessible. Sans batterie, le Tinyhawk II pèse 31,3 grammes (pour 29,2 grammes pour le TinyhawkS).
Les batteries ?
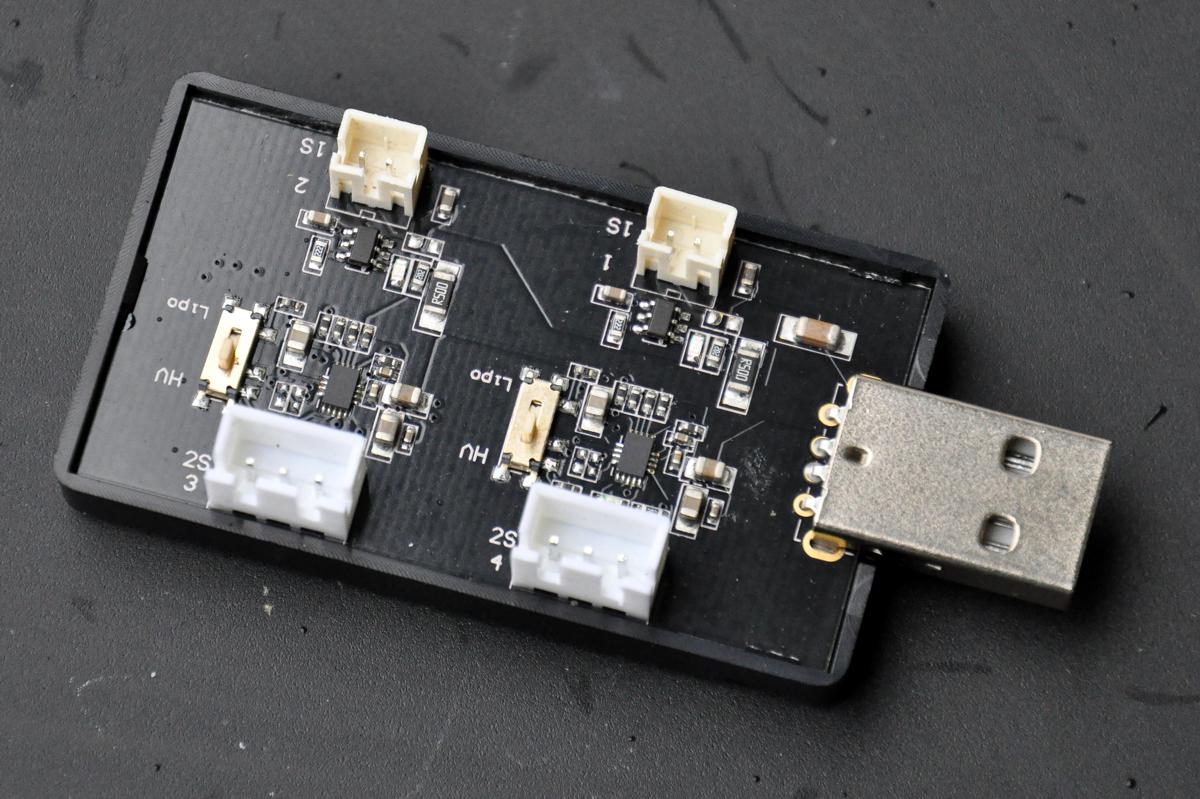 Emax fournit deux batteries avec le Tinyhawk II. La première est une LiHV 1S 450 mAh 80C avec un connecteur PST PH2.0, d’un poids de 12,8 grammes. La seconde est une LiHV 2S 300 mAh 60C équipée d’un connecteur PST PH2.0 et d’une prise d’équilibrage, d’un poids de 15,9 grammes. Pour les charger, le constructeur fournit une plaque de charge capable de charger 2 batteries 1S et 2 batteries 2S. Il suffit de la brancher sur un connecteur USB alimenté (de préférence en 2 A). Un interrupteur permet de choisir une charge classique 4,2 V ou de type LiHV en poussant jusqu’à 4,35 V. Une diode verte s’allume pendant la charge et s’éteint quand elle est terminée. A noter que la trappe sous l’appareil repose sur un élastique. C’est une excellente idée, puisque cela permet de mettre des batteries de tailles différentes, ou de continuer à utiliser une Lipo qui aurait un peu gonflé.
Emax fournit deux batteries avec le Tinyhawk II. La première est une LiHV 1S 450 mAh 80C avec un connecteur PST PH2.0, d’un poids de 12,8 grammes. La seconde est une LiHV 2S 300 mAh 60C équipée d’un connecteur PST PH2.0 et d’une prise d’équilibrage, d’un poids de 15,9 grammes. Pour les charger, le constructeur fournit une plaque de charge capable de charger 2 batteries 1S et 2 batteries 2S. Il suffit de la brancher sur un connecteur USB alimenté (de préférence en 2 A). Un interrupteur permet de choisir une charge classique 4,2 V ou de type LiHV en poussant jusqu’à 4,35 V. Une diode verte s’allume pendant la charge et s’éteint quand elle est terminée. A noter que la trappe sous l’appareil repose sur un élastique. C’est une excellente idée, puisque cela permet de mettre des batteries de tailles différentes, ou de continuer à utiliser une Lipo qui aurait un peu gonflé.
Appairage
 La procédure est simplifiée : Betaflight, présent en version 4.1.0, permet de lancer la commande bind_rx depuis la fenêtre CLI de Betaflight Configurator. Cela permet d’initier l’appairage sans besoin d’appuyer sur un bouton difficilement accessible (il se trouve sur le bord du contrôleur de vol, à peu près sous le connecteur du moteur avant gauche). Du côté de la radiocommande, il suffit de passer en mode D8, sans restriction EU-LBT ou Non-EU. Attention, les radiocommandes récentes au protocole ACCESS ne disposent plus du mode D8, elles ne sont par conséquent pas compatibles (sauf en utilisant un module externe compatible D8). Il est possible, sous betaflight, de passer en mode 16 (paramètre FRSKY_X), mais ce sera uniquement avec des radiocommande Non-EU. Le reste des réglages est très classique sous Betaflight. Les PID sont déjà réglés, il ne reste plus qu’à préciser le mode d’armement, le choix des modes, les informations à afficher sur l’OSD.
La procédure est simplifiée : Betaflight, présent en version 4.1.0, permet de lancer la commande bind_rx depuis la fenêtre CLI de Betaflight Configurator. Cela permet d’initier l’appairage sans besoin d’appuyer sur un bouton difficilement accessible (il se trouve sur le bord du contrôleur de vol, à peu près sous le connecteur du moteur avant gauche). Du côté de la radiocommande, il suffit de passer en mode D8, sans restriction EU-LBT ou Non-EU. Attention, les radiocommandes récentes au protocole ACCESS ne disposent plus du mode D8, elles ne sont par conséquent pas compatibles (sauf en utilisant un module externe compatible D8). Il est possible, sous betaflight, de passer en mode 16 (paramètre FRSKY_X), mais ce sera uniquement avec des radiocommande Non-EU. Le reste des réglages est très classique sous Betaflight. Les PID sont déjà réglés, il ne reste plus qu’à préciser le mode d’armement, le choix des modes, les informations à afficher sur l’OSD.


Salut Fred,
Par rapport au TinyhawkS tu recommanderais lequel ?
Bonjour Fred,
Suite a ton test (et confinement oblige), je me suis acheté un Tinyhawk 2 (mon deuxième tinywhoop après un UR65).
J’ai passé les ESCs en 48 khz et, effectivement, j’ai gagné en autonomie (+40s en 1S et +30s en 2S).
PS: j’ai remarqué que pour le passage de 1S en 2S, je n’avais pas besoin d’aller dans le menu de l’OSD pour changer le PID profile, il change tout seul (je l’ai mis en incrustation dans l’OSD de vol).
Bon vol
@ Lionel Stella : Good 🙂
Tu veux dire qu’il reconnait les 1S et 2S automatiquement ? Je vais réssayer…
Salut Fred, oui tout à fait.
Mais il change uniquement le PID_Profile, mas pas le Rate_profile.
j’ai coché « Profil : PID et Rate » dans le menu OSD de Bétaflight:
– en 1S, PID sur 1 et Rate sur 1
– En 2S, PID sur 2 et Rate toujours sur 1
Par contre, j’ai qu’une trentaine de mètre en distance de réception, récepteur FrSky en D16 (RXLOSS). (l’antenne est plié juste après la gaine grise, donc… ceci explique cela…) –> message envoyé à Banggood.
@Fred,
sur mon Tinyhawk 2, les moteurs sont soudés à la FC mais, il y à quand même des connecteurs (lesquels ?) pour les moteurs, je pense….
As-tu une version différente du mien…
@+
@ Lionel Stella : Je ne suis sûr d’avoir compris ta question. Sur le mien, les fils moteurs sont directement soudés sur le FC. Pour changer un moteur, il faut dégainer le fer. S’il y avait des connecteurs, il suffirait de débrancher ces connecteurs et de les rebrancher pour changer de moteur. Est-ce que le tien a des connecteurs au bout des fils qui vont aux moteurs ?
non, mes fils sont bien soudés à la FC, mais bizarrement, ils ont mis des connecteurs blancs juste après les soudures que j’ai entouré en rouge: https://www.casimages.com/i/200419083927717302.jpg.html
Reconnais-tu d’ailleurs le modèle
Car, suite è un problème avec le RX de la RC, je voudrais souder un R9MM via l’entrée SBUS, du coup, cela serai plus facile si je pouvais brancher et débrancher les moteurs….
@ Lionel Stella : Ok, ça y est, j’ai compris. Désolé 🙂 Alors oui, il y a aussi les connecteurs vides. Donc théoriquement on peut y brancher des moteurs facilement. Mais comme les moteurs du TH2 ne sont pas équipés, point de salut sans déssouder 🙁
@ Fred : il suffit que trouve je trouve les bons connecteurs (peut être les meme que pour les FC).
Je testerai au prochain démontage…..
Wait & see
@+
Bonjour Fred,
Super test, ça m’a donné envie d’acheter ce petit Tiny Whoop et j’ai enfin franchi le cap.
Je l’ai pris en version RTF FPV avec quelques batteries en plus.
Petites questions :
– crois tu que la télécommande de base suffit pour commencer ou mieux vaut il acheter un radiocommande en plus et surtout laquelle, car je suis perdu dans la jungle des radiocommandes la (Taranis X9 lite avec un module de réception en plus ?)
-je n’ai aucune connaissance en drone / fpv, crois tu que je peux commencer à me faire la main avec ce drone ou mieux vaut passer par l’étape simulateur ?
– tu conseilles vraiment le flash pour passer à 48 kHz ? Un peu peur de commencer à bidouiller avant même de l’avoir fait voler lol
Merci beaucoup !
@ Moogyo :
1) Oui, ça suffira pour débuter. Autant commencer avec une radio n’est pas formidable. Ce sera un bonheur lorsque, plus tard, tu passeras à une radio plus agréable et plus précise.
2) Tu peux débuter directement avec le Tiny, mais le risque est que tu te lances en mode Angle stabilisé. C’est une erreur à ne pas faire, tu passeras trop de temps à passer en Acro non stabilisé, et c’est ce mode qui te permettra de prendre du plaisir à voler. Donc un peu de temps passé avec un simu, pour te faire à l’acro, c’est une excellente idée. En revanche, je ne suis pas certain que cette radio soit compatible avec les simus (je ne m’avance pas , je ne l’ai pas eue en mains).
3) Non, ce n’est pas obligatoire, et un flash comporte sa part d’incertitude (comme toutes les mises à jours). Ce n’est pas indispensable à moins de vouloir gagner en autonomie. D’ailleurs au début, tu ne feras pas beaucoup de lipos complètes d’une traite, tu vas pas mal marcher 😉
Bonjour Fred !
Je viens vers vous car j’ai un ami qui sans faire exprès, a supprimé toute les données sur son drone .
Je l’ai guidé pour pouvoir faire fonctionner son drone à nouveau mais pour qu’il puisse voler correctement et dans ces lignes, il me faudrait les réglages rate des 3 profiles mais je ne les trouves pas. Pourriez-vous svp mes les communiqués?
@ Jeremy : dans le tableau des appareils testés, dernière colonne à droite, tu as un fichier dump des réglages d’usine. Tu pourras isoler les valeurs que tu cherches… 🙂
Bonjour à tous et merci beaucoup pour ces informations qui m’ont été très utiles. J’ai fait l’acquisition d’un drone tynihawks 2 avec l’ensemble masque et RC et j’ai eu la bonne idée de vouloir le brancher à Béta flight pour comprendre et « m’amuser » un peu. L’objectif été surtout de vérifier les paramètres PID et rate car je ne parvenais pas piloter le drone (je débute en fpv). Apres avoir réinitialisé les réglages (allez savoir pourquoi…), je me suis servis des infos que vous avez communiqué pour re-paramétrer le quad sur béta (dump et autre). J’ai passé beaucoup de temps à essayer de comprendre comment faire, mais il me semble être parvenu à le reconfigurer presque totalement (bind avec la RX, coulage avec le masque, paramétrage du récepteur…). La RC communique avec le tyni car les voies bougent correctement sur béta lorsque j’actionne les sticks de la radio. J’ai aussi paramétré les modes qui me semblent correspondent à la configuration usine. Tout me semble correct, malgré cela, lorsque je déconnecte le tyni et branche une lipo, impossible d’armer le quad et donc de le faire voler. Auriez-vous SVP la moindre idée de ce que j’ai mal fait car je sèche littéralement…
Merci d’avance à tous pour votre aide.
@ Mickael Gennisson : Dans Betaflight, quand tu es branché en USB et que tu armes, est-ce que tu vois la case Armed passer en rouge pour indiquer que l’armement est bien pris en compte ?
Bonjour et merci énormément pour le contenu très riche de ce site, rare en fpv de trouver des choses aussi bien en français. Je débute, j ai quelques questions si vous pouvez m aider.
Mes moteurs sont sur connecteurs, mais j ai des faux contacts très chiants, obligé de trifouiller les connecteurs pour que ça marche bien. Est ce que je peux souder les moteurs sur le FC ? Comment repérer le sens pour les soudures ?
Je voulais mettre un meilleur connecteur pour les batteries « universel » (sans ressouder des connecteurs sur les batteries que je commande) 1s et 2s, y a t il une alternative au solid pin PH2.0 (qui semble déjà bien améliorer les choses par rapport au PH2. 0 plie d origine) ? Je ne trouve pas de lipo 1s en XT30, et pas de 2s en BT2.0 ou Gnb27. Merci !
???
Quel beau métier tu fais !
Je viens de prendre possession d’un TH II et je confirme le plaisir de conduire cette bestiole dans les airs !
Il est super locké et j’apprécie particulièrement cet aspect par rapport à un mobula6 d’une Vivacité particulièrement technique à maîtriser pour un noob comme moi !
Celui-ci est parfait pour une première expérience !
Merci EMAX et surtout merci Fred pour cette belle revue !
S’il te plaît Fred, un lien pour débloquer le vtx du Tiny ?…
Je me rends compte que je vais moins loin avec lui qu’avec mon mobula6 HD et comme je vole tout seul à la campagne je cherche à augmenter la puissance en espérant garder la vidéo dans le masque tout en allant un peu plus loin…
?
@ chepere : La méthode que je donne n’a pas fonctionné ? Pour le reste des réglages, il faut suivre le diagramme du manuel (j’ai mis la capture dans le test), c’est un peu compliqué mais ça fonctionne. Mais même avec la puissance au max, il ne faut pas t’attendre à une portée folle…