Eachine UZ65, le test
 Ce petit nano racer de type Tinywhoop ressemble à tous les autres modèles. Est-il équipé pour sortir un peu du lot et se distinguer de la concurrence ? A première vue, rien ne le distingue d’appareils comme le Mobula6 de Happymodel ou le Meteor65 de BetaFPV. C’est en plaçant l’UZ65 à côté de ses camarades de vol qu’on s’aperçoit de la différence : les hélices mesurent 3,5 cm diamètre au lieu des 3,1 cm habituels. Alors, est-ce que la (toute petite différence de) taille compte ? Réponse dans cette chronique. Notez que le UZ65 m’a été donné par la boutique Banggood. Comme d’habitude, dites-moi si vous pensez que la pratique a influencé mon jugement.
Ce petit nano racer de type Tinywhoop ressemble à tous les autres modèles. Est-il équipé pour sortir un peu du lot et se distinguer de la concurrence ? A première vue, rien ne le distingue d’appareils comme le Mobula6 de Happymodel ou le Meteor65 de BetaFPV. C’est en plaçant l’UZ65 à côté de ses camarades de vol qu’on s’aperçoit de la différence : les hélices mesurent 3,5 cm diamètre au lieu des 3,1 cm habituels. Alors, est-ce que la (toute petite différence de) taille compte ? Réponse dans cette chronique. Notez que le UZ65 m’a été donné par la boutique Banggood. Comme d’habitude, dites-moi si vous pensez que la pratique a influencé mon jugement.
La vidéo
Tour du propriétaire

La structure du UZ65 est en plastique, avec des dimensions de 8 x 8 x 4 cm, et une diagonale de moteur à moteur de 6,5 cm. Il affiche donc les mêmes caractéristiques que ses concurrents. Et pourtant les hélices sont plus grandes. Comment est-ce possible ? La partie centrale est plus compacte, avec un contrôleur de vol dont les côtés sont courbes pour ne pas gêner le passage des hélices. Lesquelles sont des HQProp tripales de 3,5 mm de diamètre avec un trou central de 1 mm. Elles sont installées sur des moteurs brushless 0802 à 19000KV. Ils sont reliés au contrôleur de vol par des fils courts, soudés. Pour les remplacer, il faudra par conséquent dégainer le fer à souder, en l’absence de connecteurs.
L’électronique ?
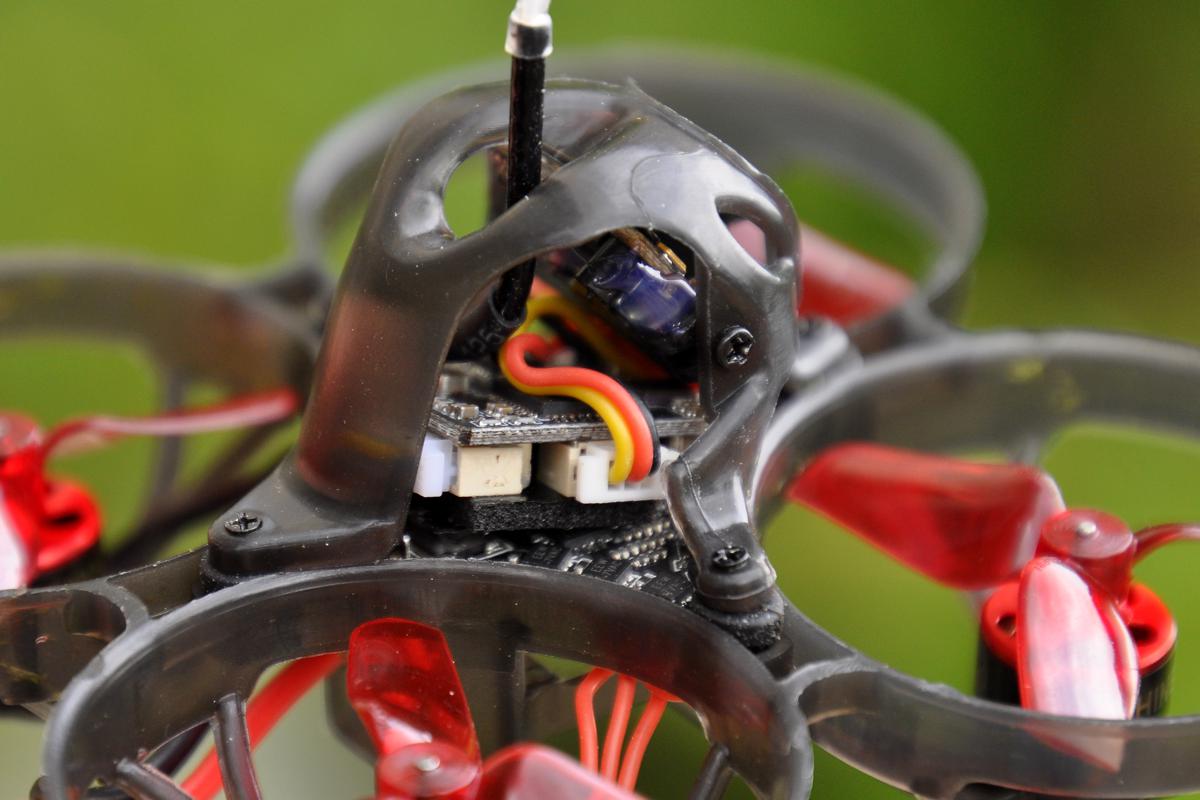 Elle est regroupée dans le plot central. Le contrôleur de vol est un Eachine AIO Superbee F4, qui comprend un ESC 4 en 1 de 5A. Il est basé sur un processeur F4 flashé avec Betaflight version CrazybeeF4FR. La version que j’ai testée est équipée d’un récepteur radio intégré de type SPI, compatible avec le protocole FrSky D8. L’antenne radio est un brin qui sort sous l’appareil. La caméra est une RunCam Nano 3, 800TVL avec un FOV de 160°. Son inclinaison est réglable avec les deux vis qui la maintiennent dans le carénage central. Cette pièce est très ajourée, pour des raisons évidentes de gain de poids.
Elle est regroupée dans le plot central. Le contrôleur de vol est un Eachine AIO Superbee F4, qui comprend un ESC 4 en 1 de 5A. Il est basé sur un processeur F4 flashé avec Betaflight version CrazybeeF4FR. La version que j’ai testée est équipée d’un récepteur radio intégré de type SPI, compatible avec le protocole FrSky D8. L’antenne radio est un brin qui sort sous l’appareil. La caméra est une RunCam Nano 3, 800TVL avec un FOV de 160°. Son inclinaison est réglable avec les deux vis qui la maintiennent dans le carénage central. Cette pièce est très ajourée, pour des raisons évidentes de gain de poids.
Mini émetteur vidéo
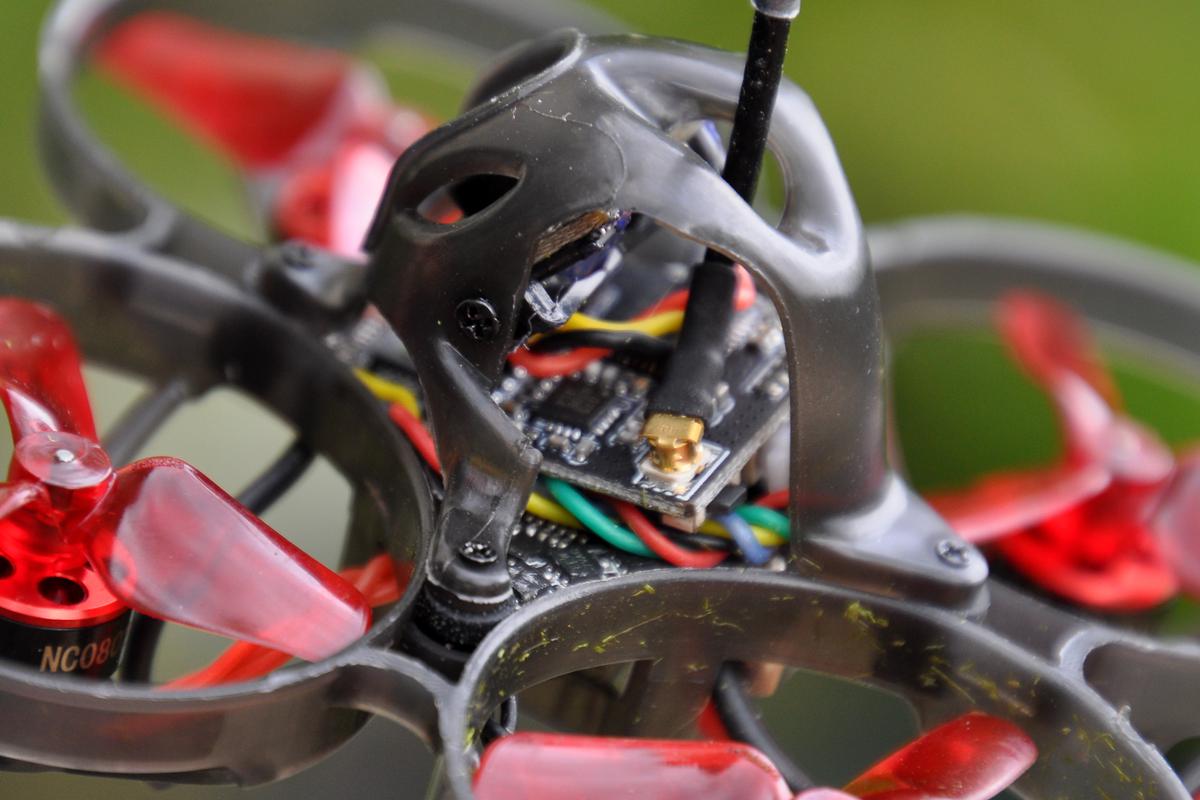 Ce pod central ajouré permet de voir l’intégralité de l’émetteur vidéo, un modèle 5,8 GHz compatible avec 40 canaux, d’une puissance de 25 mW et 100 mW (selon la fiche technique), réglable via SmartAudio avec la radiocommande et l’OSD. Ou avec un bouton, facile d’accès. L’antenne est une dipôle fixée avec un connecteur IPEX. Cet émetteur est tout petit, il tient sur un composant de 1,7 x 1,7 cm. Deux prises permettent les branchements avec la caméra et le contrôleur de vol sans soudures. Il sera par conséquent facile à changer s’il devait lâcher. A noter que le connecteur de l’antenne est gainé pour éviter les court-circuit.
Ce pod central ajouré permet de voir l’intégralité de l’émetteur vidéo, un modèle 5,8 GHz compatible avec 40 canaux, d’une puissance de 25 mW et 100 mW (selon la fiche technique), réglable via SmartAudio avec la radiocommande et l’OSD. Ou avec un bouton, facile d’accès. L’antenne est une dipôle fixée avec un connecteur IPEX. Cet émetteur est tout petit, il tient sur un composant de 1,7 x 1,7 cm. Deux prises permettent les branchements avec la caméra et le contrôleur de vol sans soudures. Il sera par conséquent facile à changer s’il devait lâcher. A noter que le connecteur de l’antenne est gainé pour éviter les court-circuit.
Fin du tour
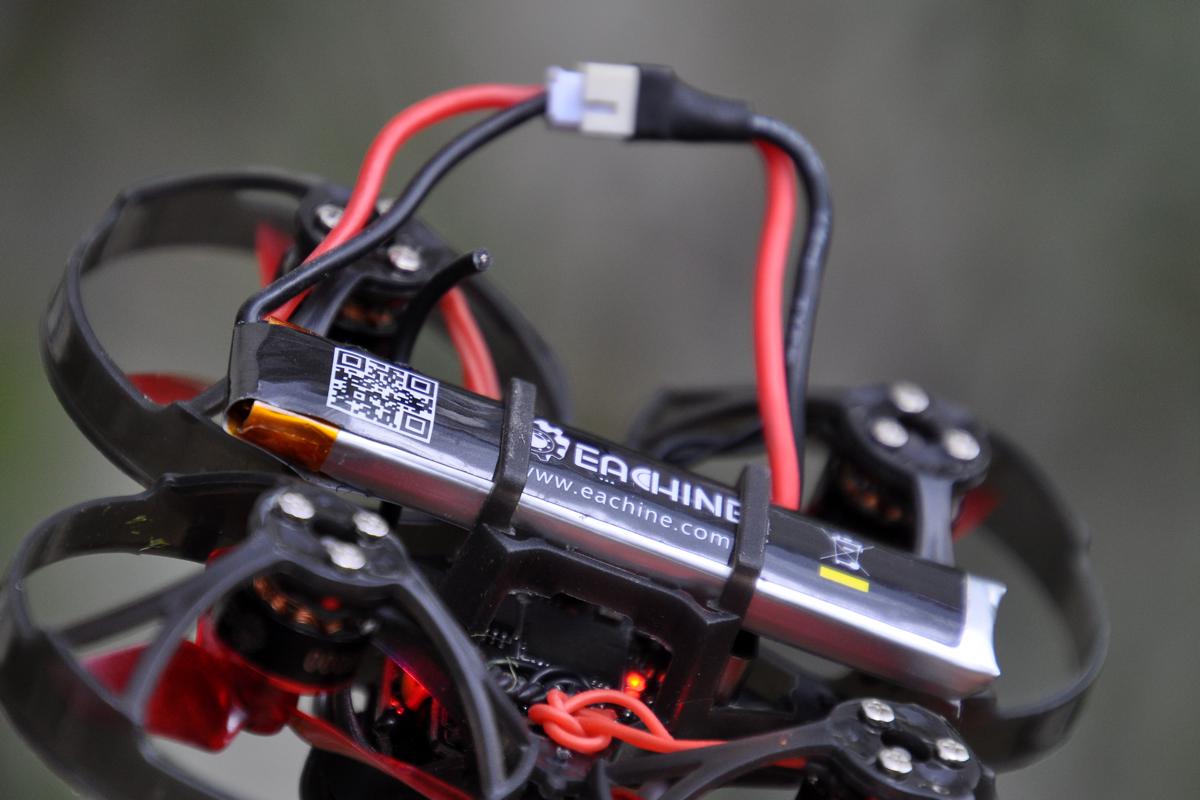 La batterie est à loger dans un panier situé sous l’appareil. La prise d’alimentation est prévue pour des batteries 1S avec un connecteur PST PH2.0. Eachine livre avec l’appareil non pas une, mais 4 batteries ! Ce sont des LiHV 4,35V de 300 mAh 30C avec un connecteur long. Le constructeur livre un chargeur USB pour charger une batterie à la fois. Le tout est livré dans une pochette… bien plus imposante que le UZ65, avec un jeu d’hélices de rechange, un outil pour les retirer, un tournevis et une documentation. Le poids ? Le UZ65 sans batterie pèse 21,8 grammes. Sa batterie ajoute 7,7 grammes, pour un total de 29,5 grammes en ordre de vol. Ultra léger, caréné : voilà qui réduit beaucoup la dangerosité de l’appareil !
La batterie est à loger dans un panier situé sous l’appareil. La prise d’alimentation est prévue pour des batteries 1S avec un connecteur PST PH2.0. Eachine livre avec l’appareil non pas une, mais 4 batteries ! Ce sont des LiHV 4,35V de 300 mAh 30C avec un connecteur long. Le constructeur livre un chargeur USB pour charger une batterie à la fois. Le tout est livré dans une pochette… bien plus imposante que le UZ65, avec un jeu d’hélices de rechange, un outil pour les retirer, un tournevis et une documentation. Le poids ? Le UZ65 sans batterie pèse 21,8 grammes. Sa batterie ajoute 7,7 grammes, pour un total de 29,5 grammes en ordre de vol. Ultra léger, caréné : voilà qui réduit beaucoup la dangerosité de l’appareil !
Appairage
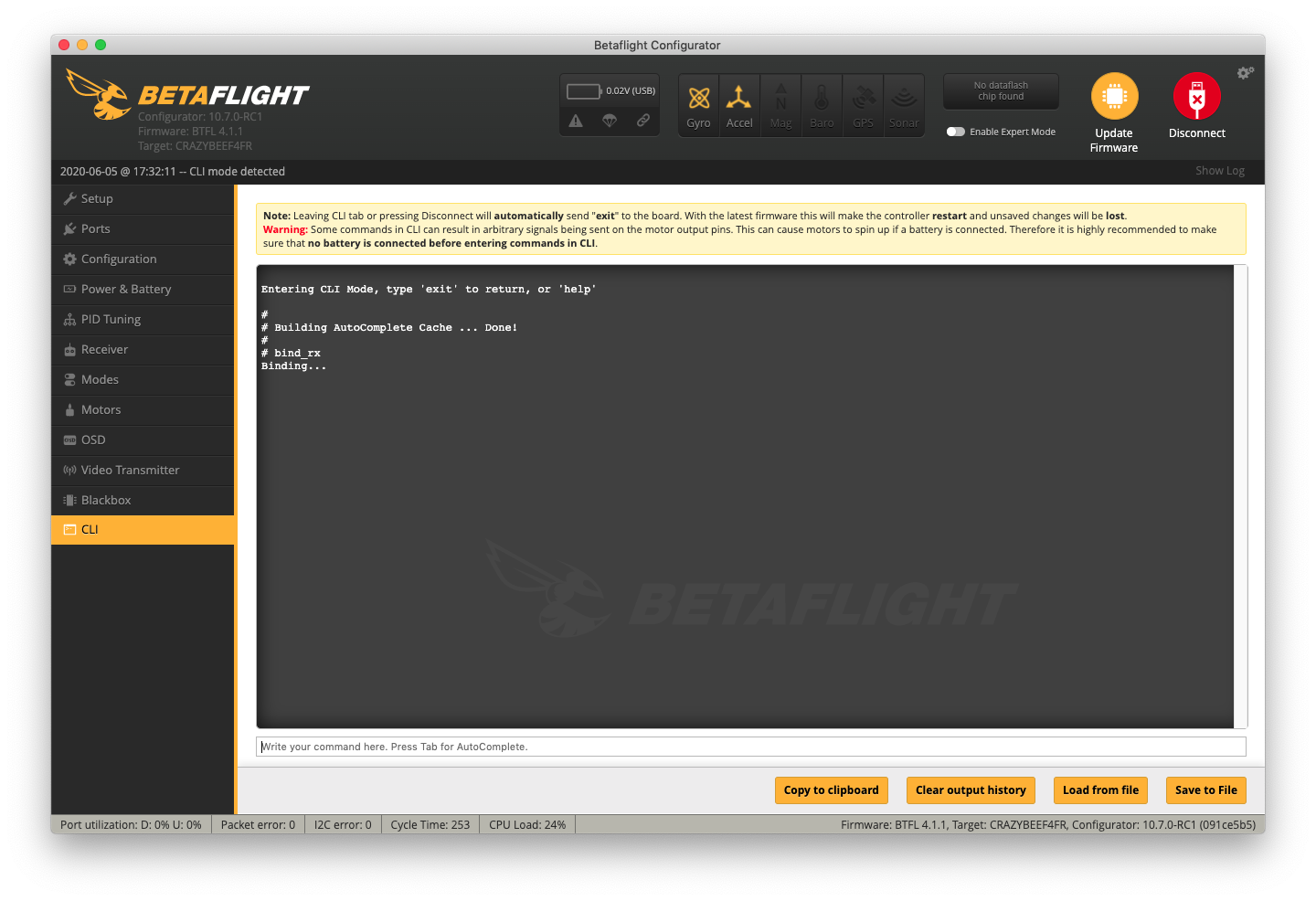 Le connecteur microUSB est facile d’accès. Le contrôleur de vol est flashé avec Betaflight firmware C4FR en version 4.1.1. Plutôt récente, donc, ce qui permet de profiter de la fonction bind_rx dans le CLI. Heureusement d’ailleurs, puisqu’il n’y a pas de bouton Bind sur le contrôleur de vol. Cela simplifie la procédure d’appairage : branchez le UZ65 en USB, lancez Betaflight Configurator, passez dans le CLI et tapez bind_rx. Sur votre radiocommande, lancez la procédure d’appairage – attention, il faut un modèle compatible D8. Je me suis servi de ma fidèle Jumper T12. La configuration est effectuée en usine, il n’y a rien à faire sauf indiquer les méthodes d’armement, de changement de modes de vol, et éventuellement de Flip Over After Crash. Plus les données à afficher sur l’OSD.
Le connecteur microUSB est facile d’accès. Le contrôleur de vol est flashé avec Betaflight firmware C4FR en version 4.1.1. Plutôt récente, donc, ce qui permet de profiter de la fonction bind_rx dans le CLI. Heureusement d’ailleurs, puisqu’il n’y a pas de bouton Bind sur le contrôleur de vol. Cela simplifie la procédure d’appairage : branchez le UZ65 en USB, lancez Betaflight Configurator, passez dans le CLI et tapez bind_rx. Sur votre radiocommande, lancez la procédure d’appairage – attention, il faut un modèle compatible D8. Je me suis servi de ma fidèle Jumper T12. La configuration est effectuée en usine, il n’y a rien à faire sauf indiquer les méthodes d’armement, de changement de modes de vol, et éventuellement de Flip Over After Crash. Plus les données à afficher sur l’OSD.


les hélices mesurent 3,5 cm diamètre au lieu des 3,1 mm habituels.
mm vs cm ? Typo 🙂
Effectivement, j’ai reçu le mien il y a deux jours et ce petit racer est vraiment génial !
J’ai ai un, il est super. A par que j’ai de gros probleme de range/failsafe (FrSky internal RX).
He oui, c’est la nouveauté de ce modele : helices de 35mm au lieu de 31mm. Ce n’est pas une typo.
Et, du coup, ce n’est PAS un format standard de FC. Vous ne pouvez pas changer la FC ( sauf pour le modele identique « SuperBee »).
Le UK65 etait dejà tres bon.
@ Pierre : Oui, typo 🙂 Je suis un peu optimiste sur les pico racers 😉 😉
Merci, c’est modifié !
Bonjour et merci encore pour ce teste,
Tu m a fait bcp rire avec tes flagellations…
Il a arrive tjr un moment ou on est tenté de poussé un peu la puissance d émission…quand tu achettes un beau JouJou comme le dji fpv system et que tu vois la difference de qualite entre le 25 et le 700…
Je parlais de puissance d émission avec un collegue qui fait de la cibie, il etait mort de rire quand je lui est annoncé 25mw max en france….en num ou analogique…
A quand un confessionnal sur Alphatango!
Faute avouée a demi pardonnée ?
Salut,
J’ai une T12 Pro (du coup l’embarras du choix), vous me conseillez quoi comme récepteur Frsky ou Flysky?
J’avais pris cette Tx pour controler toute les merdouilles (Ma précieuse….) que j’ai déjà. Mais là du coup j’ai le choix du Rx et j’hésite. Banggood dit NonUE pour le frsky D8. Un risque que ça marche par avec ma T12 Pro?
Merci d’avance.
@Jeremy tout simplement tu flashes ton RX avec le firmware de la bonne région 😉
fin du HS.
@ jérémy : Je te conseille FrSky pour une portée légèrement supérieure.
Tu as un mode FrSky D8 dans la T12, sans notion de EU-LBT ou Non-EU, donc pas de souci de compatibilité.
Le D8 n’est plus disponible sur les radios FrSky récentes pour respecter la réglementation européenne, mais ça ne concerne pas la T12 qui est multiprotocole…
Merci à vous deux 🙂 et désolé pour le petit HS.
Merci au passage pour tout ces tests et pour la feuille de récapitulatif/comparatif qui est vraiment top :). Manque juste des filtres sur les colonnes, mais je maitrise pas trop google doc.
Plus en lien avec le test: pour voler un peu dans la maison et un peu autour, pas trop agressif et plutôt crashproof :p , ce quad est top ou un trashcan est pas mal aussi et plus évolutif?
PS: petite vidéo pour incliner la camera à l’horizontal et pour pouvoir avoir un vol plus pépère: https://www.youtube.com/watch?v=I4A0Ru-MW-Y&t=78s
salut fred
merci pour ce test
puis je rajouter un mini buzzer sur ce petit drone.
as tu un lien
merci d’avance
eric
@ eric : Ce n’est pas raisonnable, il n’est pas prêt à accueillir une surcharge pondérale, même minime… Mieux vaut t’offrir les services d’un observateur à vue, ce sera plus efficace 😉
J’ai flashé les ESC mais j’en ai seulement 3 de reconnus !!!
Les moteurs fonctionnent parfaitement sus BetaFlight.
Je suis preneur de toute solution, merci 😉
@ Jérôme Bzh : Aie. Essaie si c’est possible de revenir à une version plus ancienne ?
merci pour le test, je pense que c’est avec celui-là que je vais me remettre à voler 🙂
Moi je l’ai commandé. Je me suis basé sur les coups de cœur de Fred. Du coup je me remets au fpv avec un combo UZ65 + radiomaster tx12
Salut à tous
Je serai, également, intéressé par ajouter un micro buzzer… J’ai pu identifier le pad pour buzz- mais aucunes traces ou indications sur le buzz+…
Serait il possible de m’indiquer où il se trouve ou sur quel pad se raccorder ??
Marci de votre réponse
Dronistiquement votre
Herbal