FrSky Rover 3, le test
 Cet appareil fait partie des rares commercialisés par le constructeur FrSky, spécialiste des liaisons radio. Le Rover 3 est un tricoptère : il s’appuie sur 3 hélices et 3 moteurs uniquement. Y a-t-il des avantages à cette configuration ? Les discussions à ce sujet sont sans fin ! Disons pour simplifier que ce sont des appareils qui offrent des sensations en vol différentes de celles de multirotors à 4 moteurs. On aime ou on déteste. Pour ma part, je ne suis pas fan, mais la curiosité l’a emporté ! Notez que cet appareil nous a été prêté par Studiosport. Comme d’habitude, dites-nous si vous pensez que la pratique a influencé notre jugement.
Cet appareil fait partie des rares commercialisés par le constructeur FrSky, spécialiste des liaisons radio. Le Rover 3 est un tricoptère : il s’appuie sur 3 hélices et 3 moteurs uniquement. Y a-t-il des avantages à cette configuration ? Les discussions à ce sujet sont sans fin ! Disons pour simplifier que ce sont des appareils qui offrent des sensations en vol différentes de celles de multirotors à 4 moteurs. On aime ou on déteste. Pour ma part, je ne suis pas fan, mais la curiosité l’a emporté ! Notez que cet appareil nous a été prêté par Studiosport. Comme d’habitude, dites-nous si vous pensez que la pratique a influencé notre jugement.
La vidéo
Tour du propriétaire
 Le Rover 3 est un appareil livré prêt à l’emploi. Son look est soigné, reposant sur un carénage en plastique fin mais assez rigide. Il mesure 31 cm de longueur, 29,7 cm de largeur, 10,7 cm de hauteur et pèse 229,2 grammes (sans batterie). Les bras moteurs à l’avant sont également en plastique, mais ils sont renforcés par un jonc en carbone. Ils pivotent pour faire basculer les hélices vers l’avant ou vers l’arrière. Le bras arrière est en plastique un peu plus épais. Sous l’appareil se trouvent un train d’atterrissage fait de 2 roues et une roulette de queue fixe. Les hélices sont entourées par des protections d’hélices en plastique assez imposantes. Les hélices sont des tripales 4 pouces 4040 fixées par des écrous, sauf l’hélice arrière qui est une bipale.
Le Rover 3 est un appareil livré prêt à l’emploi. Son look est soigné, reposant sur un carénage en plastique fin mais assez rigide. Il mesure 31 cm de longueur, 29,7 cm de largeur, 10,7 cm de hauteur et pèse 229,2 grammes (sans batterie). Les bras moteurs à l’avant sont également en plastique, mais ils sont renforcés par un jonc en carbone. Ils pivotent pour faire basculer les hélices vers l’avant ou vers l’arrière. Le bras arrière est en plastique un peu plus épais. Sous l’appareil se trouvent un train d’atterrissage fait de 2 roues et une roulette de queue fixe. Les hélices sont entourées par des protections d’hélices en plastique assez imposantes. Les hélices sont des tripales 4 pouces 4040 fixées par des écrous, sauf l’hélice arrière qui est une bipale.
Suite du tour
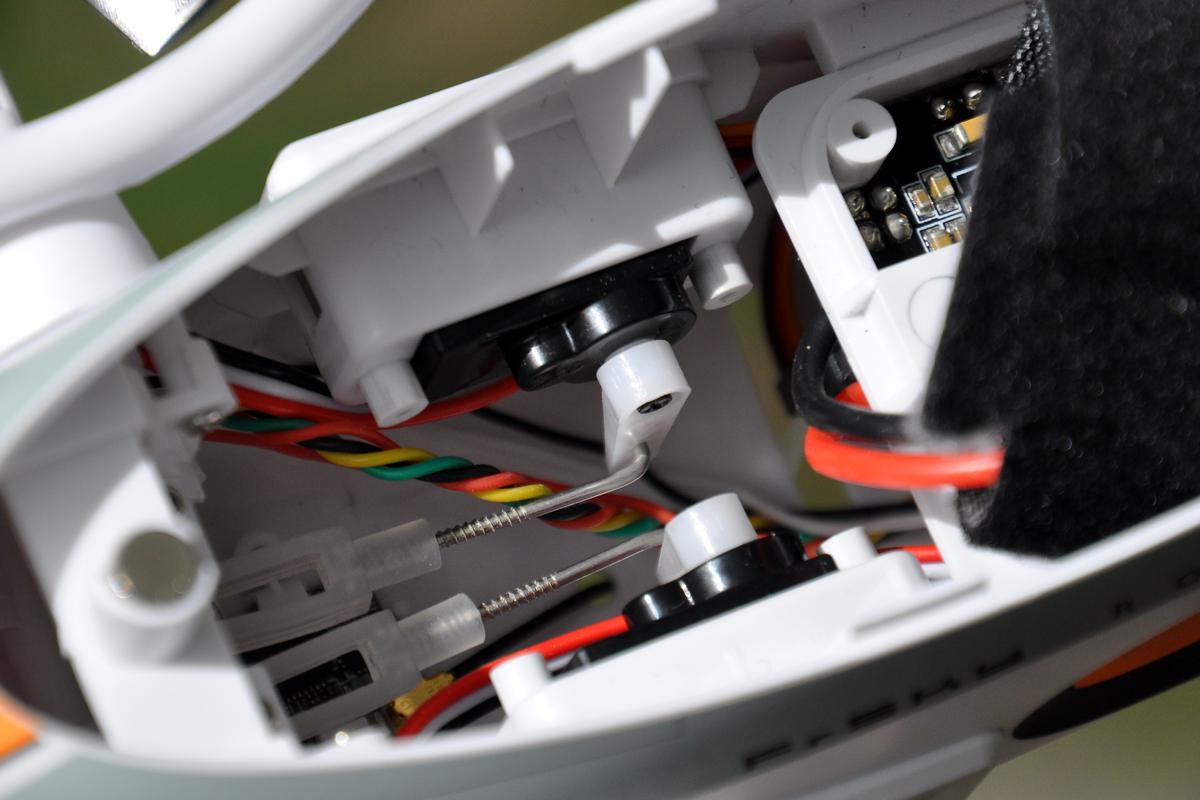 A l’avant, un cache translucide protège la caméra FPV. Le cache se retire en poussant un levier sous le nez de l’appareil, puis en le faisant basculer. L’accès à la trappe de la batterie passe par la fausse verrière opaque sur le dessus, fixée avec un aimant. A l’intérieur, il y a de la place, beaucoup de place même pour la batterie, à sécuriser avec un Velcro. La prise d’alimentation est une XT30. On aperçoit à l’étage inférieur le contrôleur de vol, un ESC juste en-dessous et 2 servos qui permettent de piloter l’inclinaison des moteurs avant. Pour en voir plus, il faut retirer la trappe du dessous, fixée avec 4 vis cruciformes. L’émetteur vidéo Scout VS600 Mini est fixé sur cette trappe, avec son antenne dipôle qui traverse le plastique. Le contrôleur de vol héberge un récepteur radio, trahi par les deux antennes qui sortent à l’arrière du carénage et sont fixées sur la protection d’hélices arrière.
A l’avant, un cache translucide protège la caméra FPV. Le cache se retire en poussant un levier sous le nez de l’appareil, puis en le faisant basculer. L’accès à la trappe de la batterie passe par la fausse verrière opaque sur le dessus, fixée avec un aimant. A l’intérieur, il y a de la place, beaucoup de place même pour la batterie, à sécuriser avec un Velcro. La prise d’alimentation est une XT30. On aperçoit à l’étage inférieur le contrôleur de vol, un ESC juste en-dessous et 2 servos qui permettent de piloter l’inclinaison des moteurs avant. Pour en voir plus, il faut retirer la trappe du dessous, fixée avec 4 vis cruciformes. L’émetteur vidéo Scout VS600 Mini est fixé sur cette trappe, avec son antenne dipôle qui traverse le plastique. Le contrôleur de vol héberge un récepteur radio, trahi par les deux antennes qui sortent à l’arrière du carénage et sont fixées sur la protection d’hélices arrière.
Mise en route
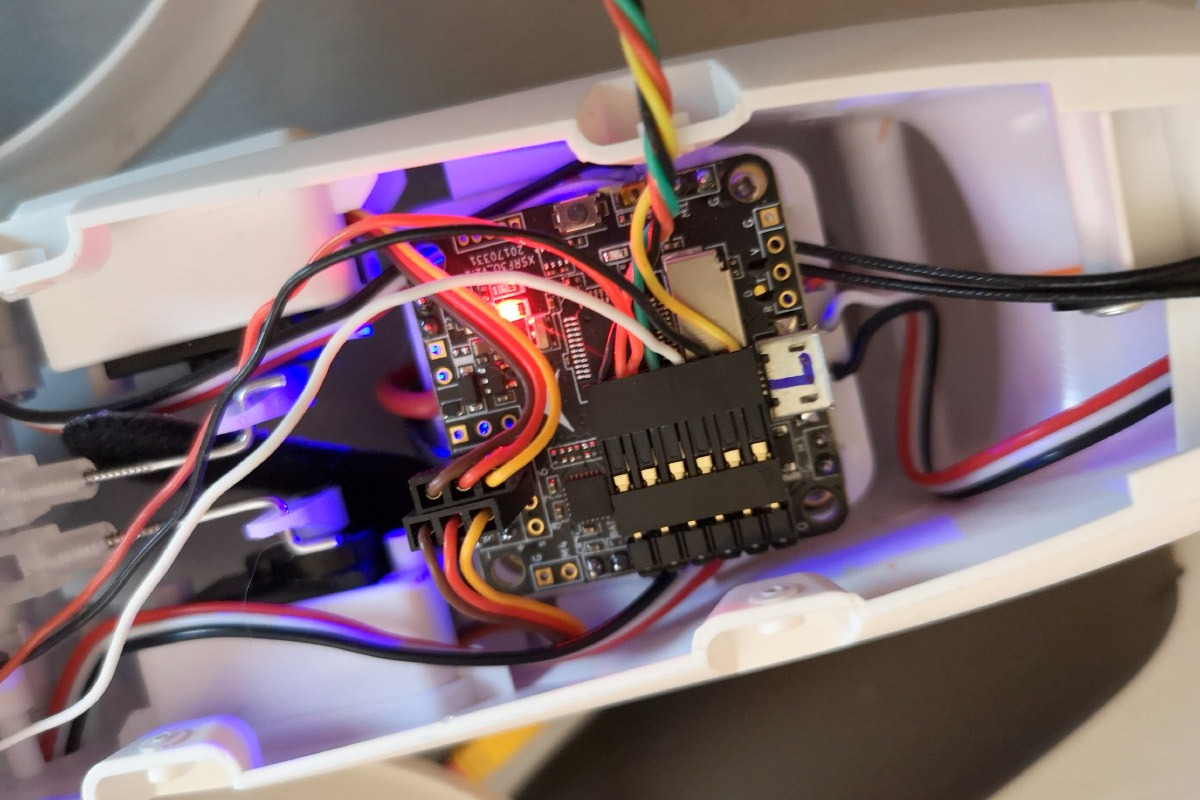 Le contrôleur de vol est un XSRF3O de FrSky. Il repose sur un processeur F3, avec un connecteur microUSB pour les réglages, qui n’est accessible que si vous disposez d’un câble souple avec une prise courte. Attention, il y a un risque d’arracher le connecteur si votre câble est solide. Le bouton d’appairage (bind) est facilement accessible – y compris trappe fermée. Le Rover 3 que j’ai testé fonctionnait en protocole Non-EU, je l’ai appairé avec une radiocommande Jumper T12. Il faut impérativement passer par Betaflight Configurator pour les réglages de Betaflight (version 3.4.1). Cela impose de brancher le contrôleur de vol en USB, et par conséquent d’ouvrir la trappe inférieure. Tous les réglages sont assez classiques, il faut simplement que l’un des interrupteurs soient remplacés par une molette sur la radiocommande.
Le contrôleur de vol est un XSRF3O de FrSky. Il repose sur un processeur F3, avec un connecteur microUSB pour les réglages, qui n’est accessible que si vous disposez d’un câble souple avec une prise courte. Attention, il y a un risque d’arracher le connecteur si votre câble est solide. Le bouton d’appairage (bind) est facilement accessible – y compris trappe fermée. Le Rover 3 que j’ai testé fonctionnait en protocole Non-EU, je l’ai appairé avec une radiocommande Jumper T12. Il faut impérativement passer par Betaflight Configurator pour les réglages de Betaflight (version 3.4.1). Cela impose de brancher le contrôleur de vol en USB, et par conséquent d’ouvrir la trappe inférieure. Tous les réglages sont assez classiques, il faut simplement que l’un des interrupteurs soient remplacés par une molette sur la radiocommande.
Pourquoi ?
 Il y a 3 modes de fonctionnement du Rover 3. Le premier est le Angle. Comme à l’habitude, c’est un mode de pilotage entièrement stabilisé, sauf sur la gestion de la hauteur de vol. Le second est Horizon. Il est toujours stabilisé, mais contrairement au mode Horizon sur un racer classique, pousser les joysticks à fond ne déclenche pas de tonneau ou de looping, le comportement reste totalement semblable à celui du mode Angle… à un détail près. Avec une molette de la radiocommande, il est possible de régler manuellement l’inclinaison des moteurs avant. Désactiver les modes Angle et Horizon place en mode Acro, sans stabilisation. La molette est inactive dans ce mode. Il est possible de cumuler les modes avec Airmode (qui n’est pas un mode malgré son nom) pour toujours avoir un filet de gaz.
Il y a 3 modes de fonctionnement du Rover 3. Le premier est le Angle. Comme à l’habitude, c’est un mode de pilotage entièrement stabilisé, sauf sur la gestion de la hauteur de vol. Le second est Horizon. Il est toujours stabilisé, mais contrairement au mode Horizon sur un racer classique, pousser les joysticks à fond ne déclenche pas de tonneau ou de looping, le comportement reste totalement semblable à celui du mode Angle… à un détail près. Avec une molette de la radiocommande, il est possible de régler manuellement l’inclinaison des moteurs avant. Désactiver les modes Angle et Horizon place en mode Acro, sans stabilisation. La molette est inactive dans ce mode. Il est possible de cumuler les modes avec Airmode (qui n’est pas un mode malgré son nom) pour toujours avoir un filet de gaz.
Bizarre…
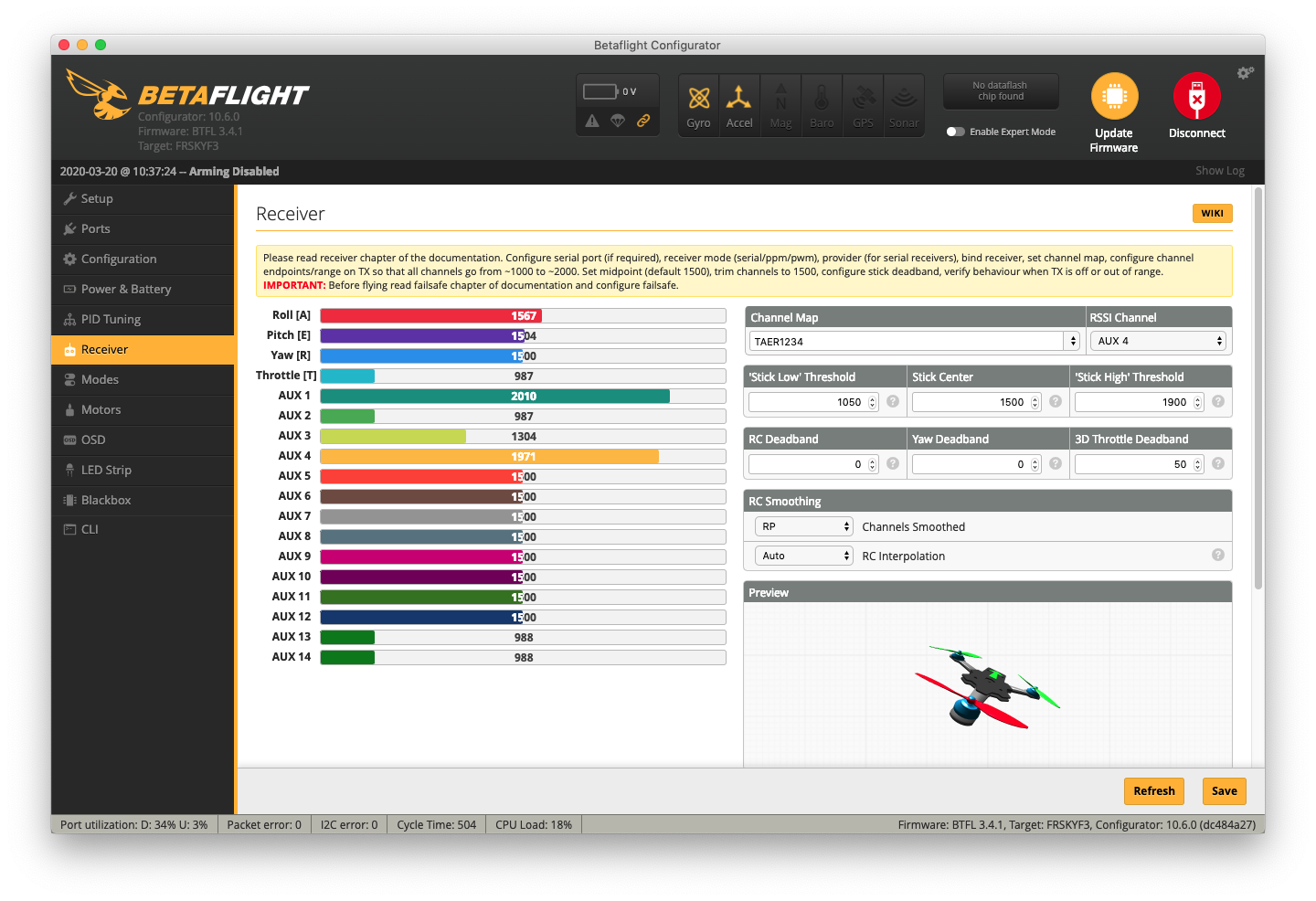
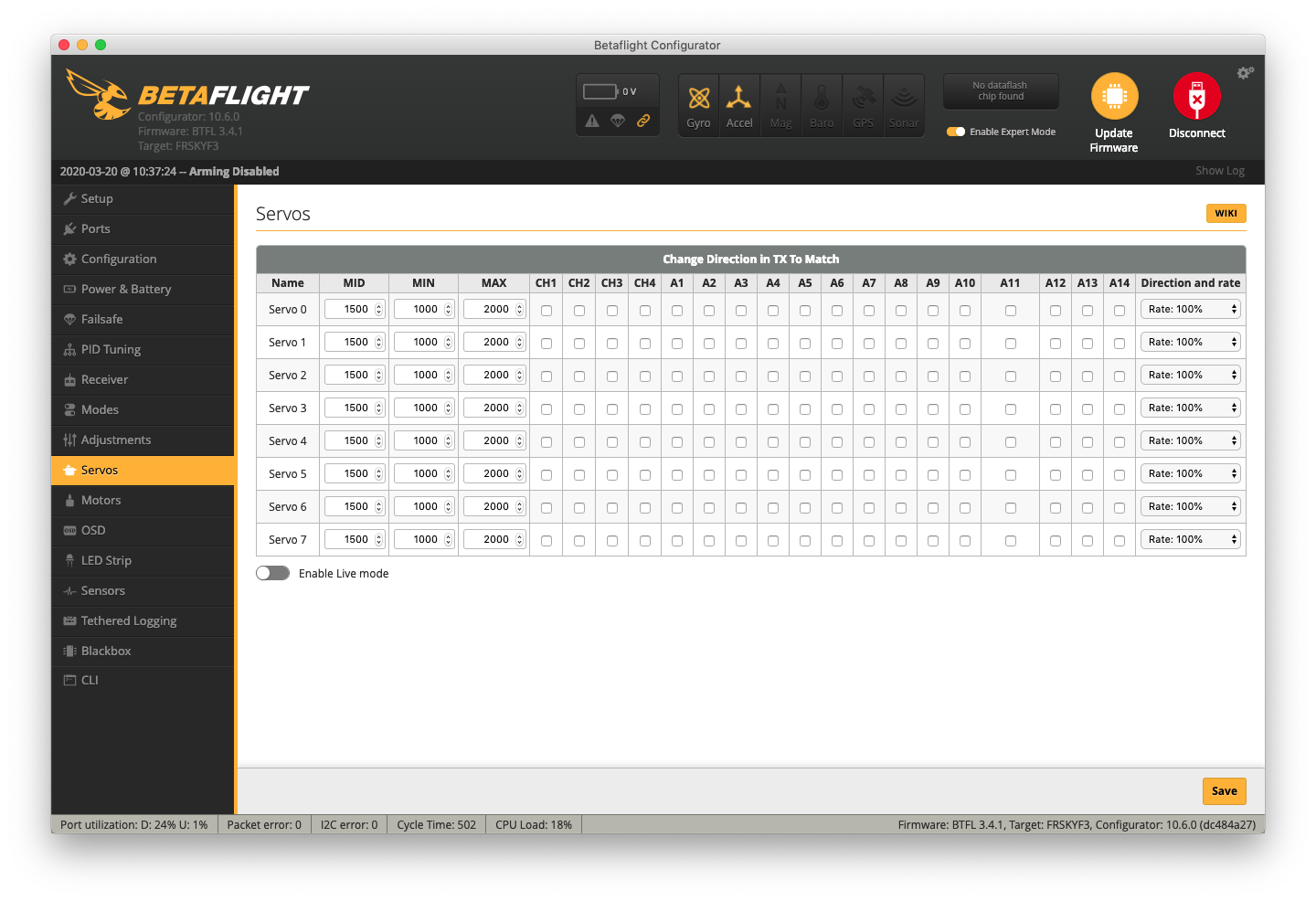 Le RSSI est sur l’AUX4, c’est parfait et cela permet à la radiocommande de recevoir cette valeur en télémétrie. La molette est réglée sur l’AUX3. Je m’attendais à ce que la page Servos de Betaflight Configuator, accessible en cochant la case « Enable Expert Mode », fasse référence à l’AUX3. Pourtant elle n’affiche rien, aucun servo n’est configuré. Je n’ai pas d’explication à cette page vide… Pourtant l’inclinaison des rotors par les servos fonctionne parfaitement, soit animée automatiquement par le contrôleur de vol, soit manuellement avec la molette de la radiocommande.
Le RSSI est sur l’AUX4, c’est parfait et cela permet à la radiocommande de recevoir cette valeur en télémétrie. La molette est réglée sur l’AUX3. Je m’attendais à ce que la page Servos de Betaflight Configuator, accessible en cochant la case « Enable Expert Mode », fasse référence à l’AUX3. Pourtant elle n’affiche rien, aucun servo n’est configuré. Je n’ai pas d’explication à cette page vide… Pourtant l’inclinaison des rotors par les servos fonctionne parfaitement, soit animée automatiquement par le contrôleur de vol, soit manuellement avec la molette de la radiocommande.


Coucou, test bien fait, comme d’habitude…
Suis assez d’accord sur tout… bien que j’ai pas encore cassé le mien après une 15aines de vols… c’est clairement un cruseur, les ballades pèpères sont ce qu’il préfère… le mode horizon ne sert clairement à rien, c’est soit stab, soit accro…
J’ai viré la cam d’origine sur le mien et lui ai mis une caddx baby turtle, en mode stab ça permet de revenir avec de belles images qui ne bougent pas trop, du fait que l’appareil reste horizontal. et pour l’autonomie, c’est vraiment le point fort, avec des lipo 1000mah en 3s je chatouille les 15min !!!
Ce qui m’a plus chez lui ? sa bouille d’ovni 🙂
Rover ? Allez, après ils vont faire un VTOL et l’appeler FrSky Boat 2020 ?
IL a une belle gueule 😉
Merci pour ce test ! Mine de rien, un peu de lecture pour se changer les idées en ce moment, c’est quelque chose qui devient important…