DJI FPV Air Unit VS Caddx Vista, en présence d’obstacles
 Le constructeur DJI a changé la donne depuis quelques mois, avec la sortie de son système de retour vidéo numérique en temps réel, le DJI Digital FPV System (voir le test ici). De nombreux pilotes ont hésité, attendu d’avoir plus de retours, pour finalement s’équiper. A titre personnel, j’en suis à 4 équipements DJI FPV Air Unit sur mes machines, que ce soit des appareils 5 pouces freestyle, Cinewhoop 3 pouces, 7 pouces pour les vols doux avec plus d’autonomie et de portée. Plus le petit dernier, le Beta95X de BetaFPV (voir le test ici), tout petit modèle. Lui est équipé du module Vista du constructeur Caddx, compatible avec le système de DJI.
Le constructeur DJI a changé la donne depuis quelques mois, avec la sortie de son système de retour vidéo numérique en temps réel, le DJI Digital FPV System (voir le test ici). De nombreux pilotes ont hésité, attendu d’avoir plus de retours, pour finalement s’équiper. A titre personnel, j’en suis à 4 équipements DJI FPV Air Unit sur mes machines, que ce soit des appareils 5 pouces freestyle, Cinewhoop 3 pouces, 7 pouces pour les vols doux avec plus d’autonomie et de portée. Plus le petit dernier, le Beta95X de BetaFPV (voir le test ici), tout petit modèle. Lui est équipé du module Vista du constructeur Caddx, compatible avec le système de DJI.
DJI ou Caddx ?
 En réalisant mes essais en intérieur (parking) et en extérieur, je me suis aperçu que j’obtenais de meilleurs résultats avec l’équipement de Caddx sur le Beta95X qu’avec celui de DJI. Pour faire simple, dans la plupart des situations, je conserve un retour vidéo exploitable avec le matériel Vista là où la liaison est inexploitable (insuffisante pour piloter en immersion) voire perdue avec le matériel DJI. C’est très étonnant, dans la mesure où le module Vista est équipé d’une seule antenne, et que son hardware est supposé être très semblable à celui de DJI… Pour confirmer ou infirmer mes impressions, j’ai décidé de vidéo-comparer le comportement en vol et d’effectuer des mesures.
En réalisant mes essais en intérieur (parking) et en extérieur, je me suis aperçu que j’obtenais de meilleurs résultats avec l’équipement de Caddx sur le Beta95X qu’avec celui de DJI. Pour faire simple, dans la plupart des situations, je conserve un retour vidéo exploitable avec le matériel Vista là où la liaison est inexploitable (insuffisante pour piloter en immersion) voire perdue avec le matériel DJI. C’est très étonnant, dans la mesure où le module Vista est équipé d’une seule antenne, et que son hardware est supposé être très semblable à celui de DJI… Pour confirmer ou infirmer mes impressions, j’ai décidé de vidéo-comparer le comportement en vol et d’effectuer des mesures.
Explications…
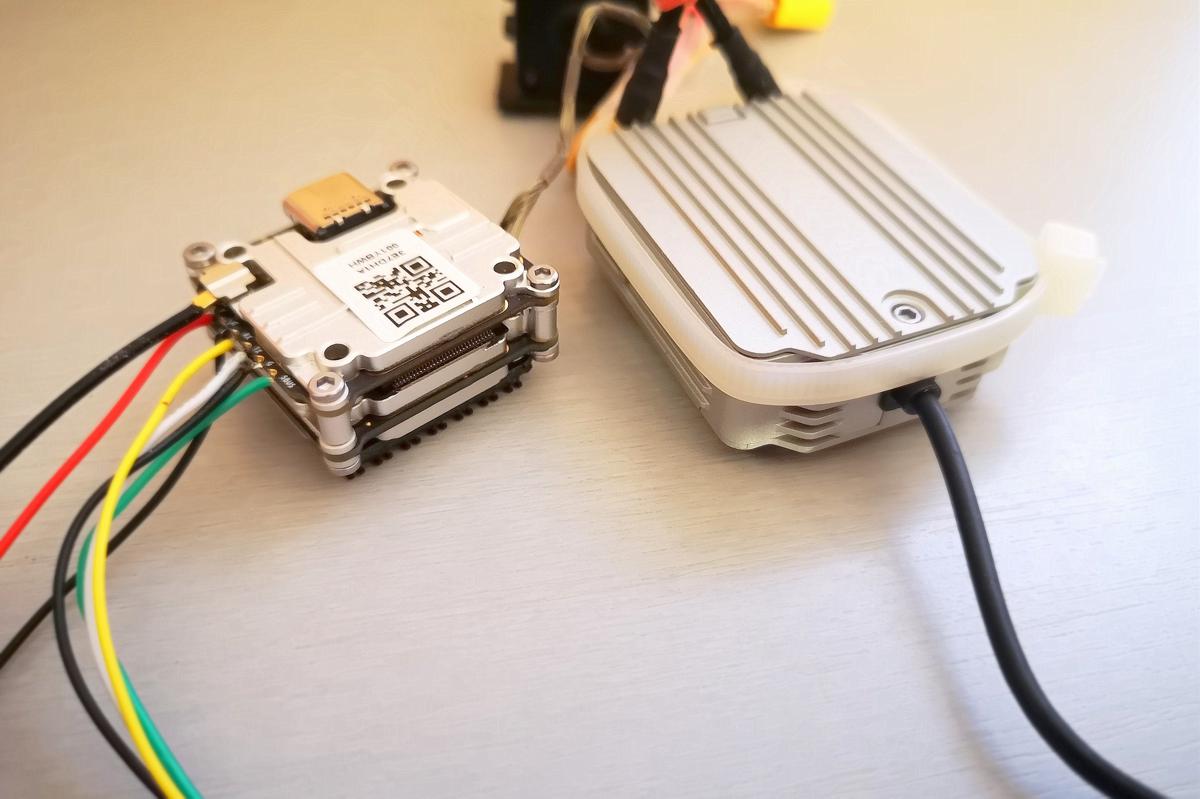
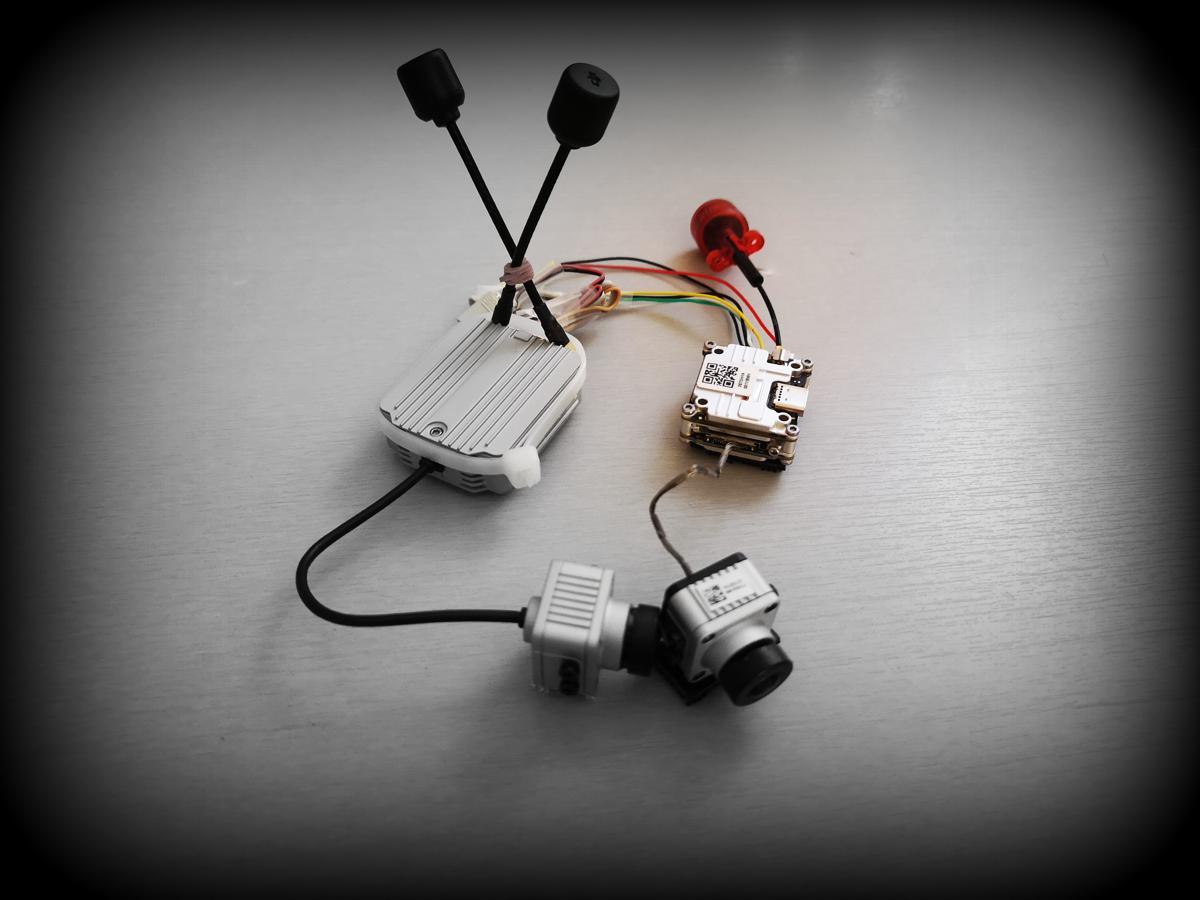
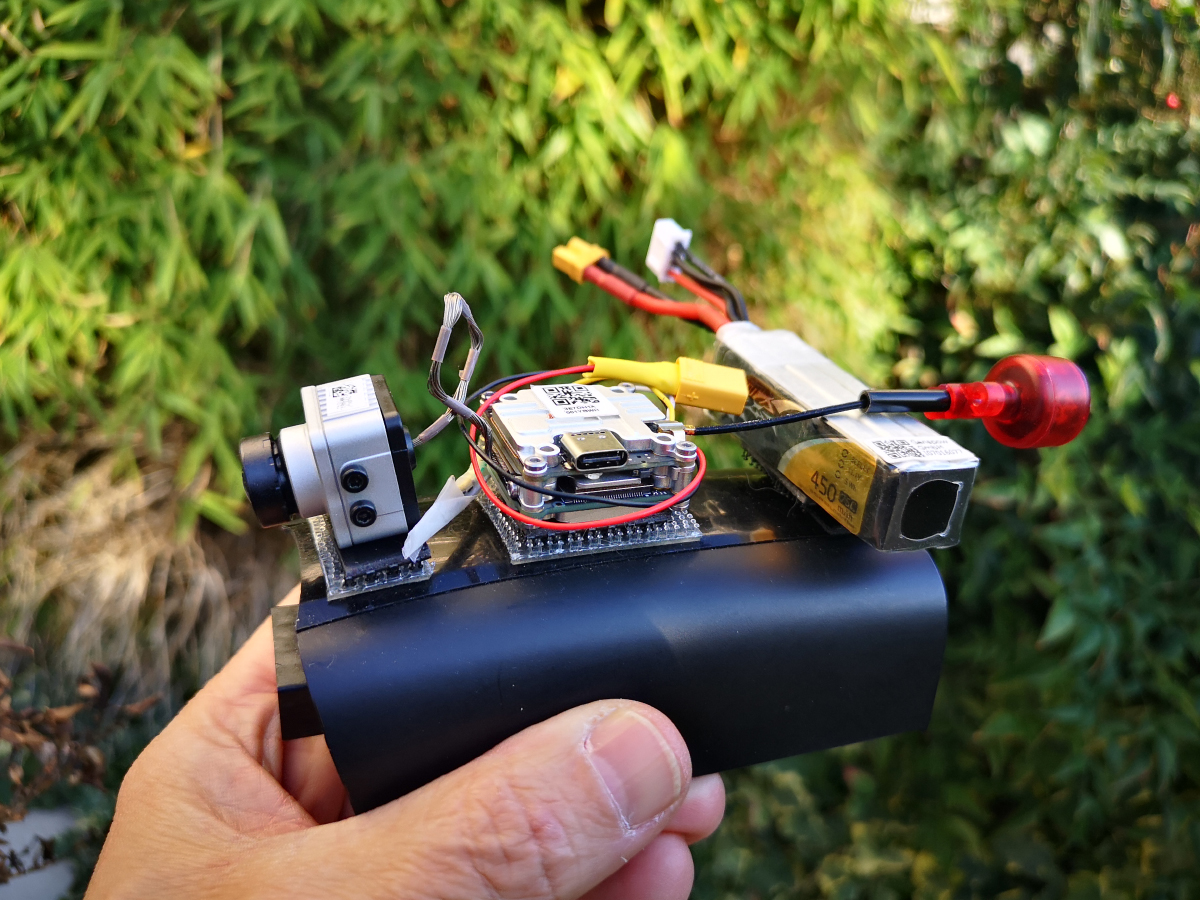 Mon but est de produire des vidéos et les monter simultanément pour comparer le résultat pendant un vol. Pour que les vidéos puissent être comparables, j’ai choisi de réaliser des séquences entièrement automatisées, en extérieur. Pour cela, j’ai ressorti mon bon « vieux » Bebop 2 Power de Parrot. Pourquoi ? Parce qu’il est en mesure de porter les 99 grammes d’un FPV Air Unit et une batterie et les 76 grammes d’un Vista et une batterie d’une part, parce qu’il permet d’être programmé pour des vols autonomes avec le module Flightplan de Freeflight Pro d’autre part. Le surpoids est tout de même critique pour le Bebop 2 Power, qui entre parfois dans des oscillations assez fortes (surtout avec le matériel de DJI)… mais poursuit son vol comme si de rien n’était. Pour mes tests, j’ai utilisé un DJI FPV Air Unit et un Caddx Vista sortis de la boite, activés, et simplement alimentés par une Lipo 3S 450 mAh, sans lien avec une électronique de bord.
Mon but est de produire des vidéos et les monter simultanément pour comparer le résultat pendant un vol. Pour que les vidéos puissent être comparables, j’ai choisi de réaliser des séquences entièrement automatisées, en extérieur. Pour cela, j’ai ressorti mon bon « vieux » Bebop 2 Power de Parrot. Pourquoi ? Parce qu’il est en mesure de porter les 99 grammes d’un FPV Air Unit et une batterie et les 76 grammes d’un Vista et une batterie d’une part, parce qu’il permet d’être programmé pour des vols autonomes avec le module Flightplan de Freeflight Pro d’autre part. Le surpoids est tout de même critique pour le Bebop 2 Power, qui entre parfois dans des oscillations assez fortes (surtout avec le matériel de DJI)… mais poursuit son vol comme si de rien n’était. Pour mes tests, j’ai utilisé un DJI FPV Air Unit et un Caddx Vista sortis de la boite, activés, et simplement alimentés par une Lipo 3S 450 mAh, sans lien avec une électronique de bord.
Les limites de cette solution ?
 Avec le système de DJI, lorsque la réception faiblit, les images mal reçues ne sont pas stockées dans la vidéo enregistrée sur le casque. Le résultat, c’est que les séquences où la réception est mauvaise souffrent d’un effet « accéléré » parce qu’il manque des images. Le premier inconvénient : ces vidéos sont désagréables à regarder, avec un effet Benny Hill. Le second inconvénient : il est difficile de comparer 2 séquences puisqu’elles sont désynchronisées dès que la réception faiblit. J’ai donc choisi, au montage, de mettre la vidéo en pause quand la séquence prenait trop d’avance pour cause de mauvaise réception. Cela permet tout de même de se rendre compte des différences entre DJI et Caddx.
Avec le système de DJI, lorsque la réception faiblit, les images mal reçues ne sont pas stockées dans la vidéo enregistrée sur le casque. Le résultat, c’est que les séquences où la réception est mauvaise souffrent d’un effet « accéléré » parce qu’il manque des images. Le premier inconvénient : ces vidéos sont désagréables à regarder, avec un effet Benny Hill. Le second inconvénient : il est difficile de comparer 2 séquences puisqu’elles sont désynchronisées dès que la réception faiblit. J’ai donc choisi, au montage, de mettre la vidéo en pause quand la séquence prenait trop d’avance pour cause de mauvaise réception. Cela permet tout de même de se rendre compte des différences entre DJI et Caddx.
Les mesures ?
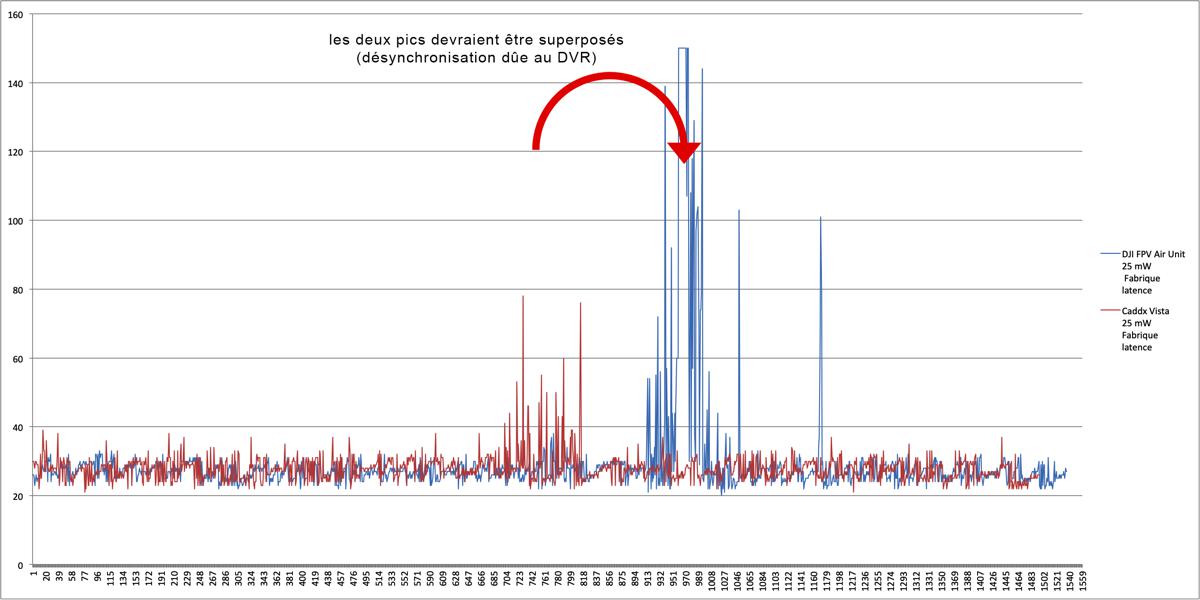
Les vidéos enregistrées sur le casque de DJI sont accompagnées par un fichier .srt (format sous-titre). Il contient des valeurs enregistrées en temps réel, comme la qualité du signal, la tension de la batterie et du casque, le nombre de cellules de la batterie du drone et du casque, la latence et le bitrate. Les données ne sont pas enregistrées à intervalles réguliers. Pour comparer deux enregistrements, j’ai importé les .srt dans des feuilles Excel, isolé les valeurs qui m’intéressaient avec une petite macro, à savoir la qualité du signal, la latence et le bitrate, puis j’ai produit des graphiques comparatifs. L’inconvénient de cette méthode ? Elle souffre de l’oubli du stockage des valeurs lorsque la réception est mauvaise, comme pour les vidéos. Lorsque la réception faiblit, il manque des données (puisqu’il manque des images). Cela introduit par conséquent des décalages dans les courbes graphiques, qu’il faut donc étudier avec attention pour les analyser. Les pics sont le plus souvent décalés – mais on les repère assez facilement.
Les configurations testées
 J’ai effectué 4 vols par session. Le premier est avec le DJI FPV Air Unit et le casque avec les antennes DJI d’origine (stock). J’ai effectué le vol suivant en remplaçant les antennes DJI du casque par des modèles LX Mini LHCP 3 tours de La Fabrique Circulaire. Pour le troisième vol j’ai remplacé le DJI FPV Air Unit par un Caddx Vista. Le quatrième et dernier vol a été fait avec Vista, mais avec les antennes DJI sur le casque. Le tout en 25 mW, Focus On. Le vol programmé comporte une partie sans obstacles, puis une partie avec obstacles, derrière un petit bois. Le casque est porté comme en situation réelle, en vérifiant que les antennes pointent bien en direction du Bebop 2 Power (surtout dans le cas des antennes directionnelles de La Fabrique Circulaire). J’ai répété chaque session à 3 reprises pour m’assurer que le comportement était à chaque fois le même.
J’ai effectué 4 vols par session. Le premier est avec le DJI FPV Air Unit et le casque avec les antennes DJI d’origine (stock). J’ai effectué le vol suivant en remplaçant les antennes DJI du casque par des modèles LX Mini LHCP 3 tours de La Fabrique Circulaire. Pour le troisième vol j’ai remplacé le DJI FPV Air Unit par un Caddx Vista. Le quatrième et dernier vol a été fait avec Vista, mais avec les antennes DJI sur le casque. Le tout en 25 mW, Focus On. Le vol programmé comporte une partie sans obstacles, puis une partie avec obstacles, derrière un petit bois. Le casque est porté comme en situation réelle, en vérifiant que les antennes pointent bien en direction du Bebop 2 Power (surtout dans le cas des antennes directionnelles de La Fabrique Circulaire). J’ai répété chaque session à 3 reprises pour m’assurer que le comportement était à chaque fois le même.
Le résultat vidéo ?
Les séquences montrent très clairement que la réception vidéo est conservée plus longtemps avec le module Vista qu’avec le module FPV Air Unit ! Avec l’usage des antennes de La Fabrique Circulaire sur le casque, on gagne encore en tenue et en portée derrière des obstacles. Mais même avec les antennes directionnelles de La Fabrique Circulaire, l’outil de DJI est moins performant que celui de Caddx !
Le résultat des mesures ?
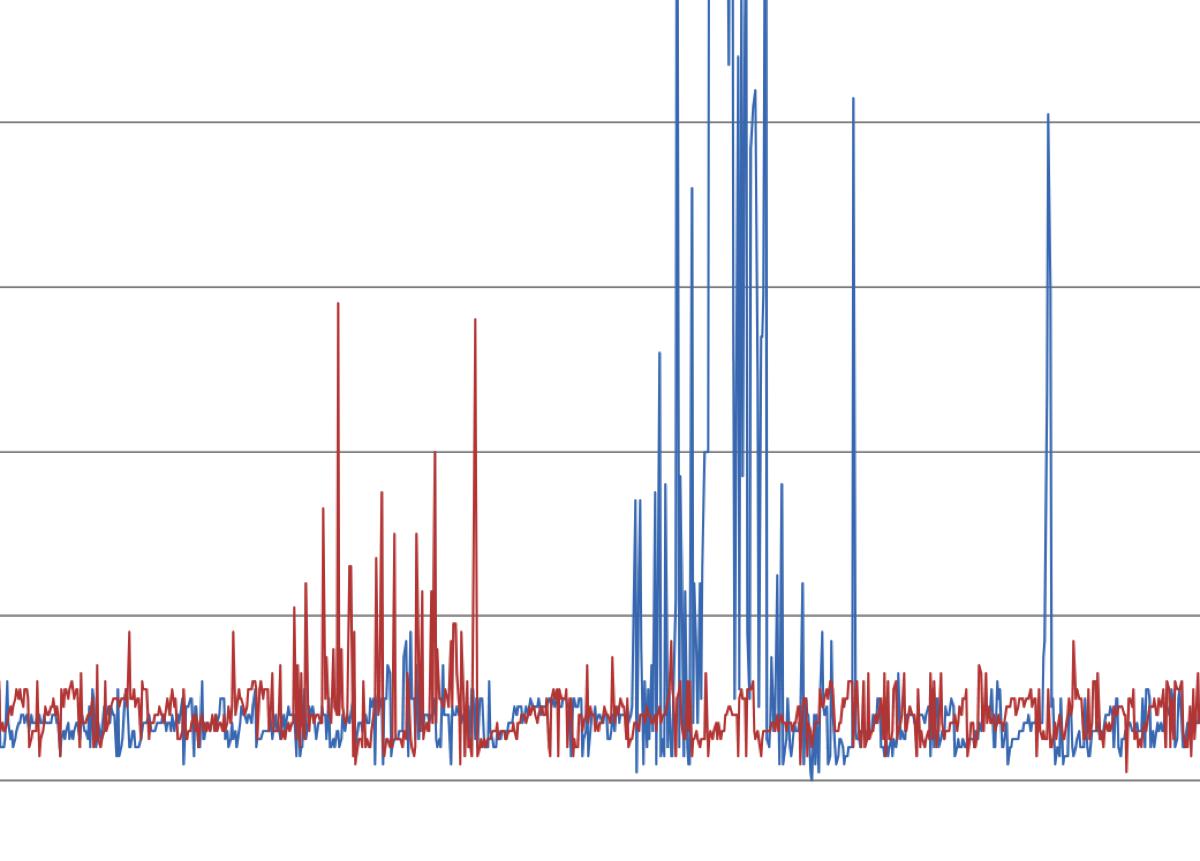
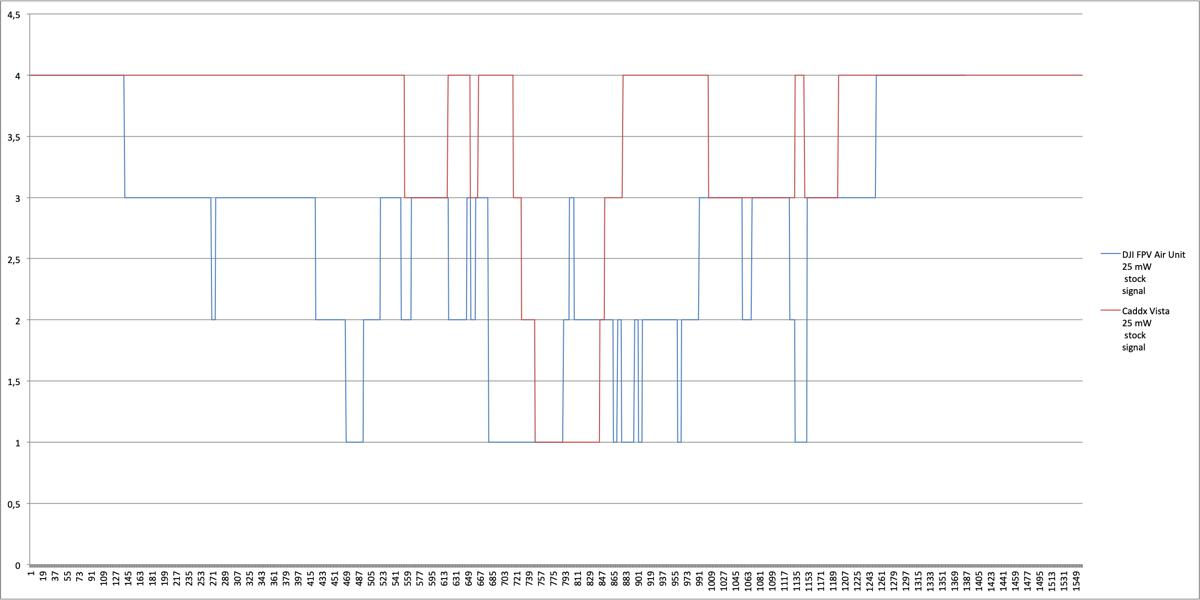
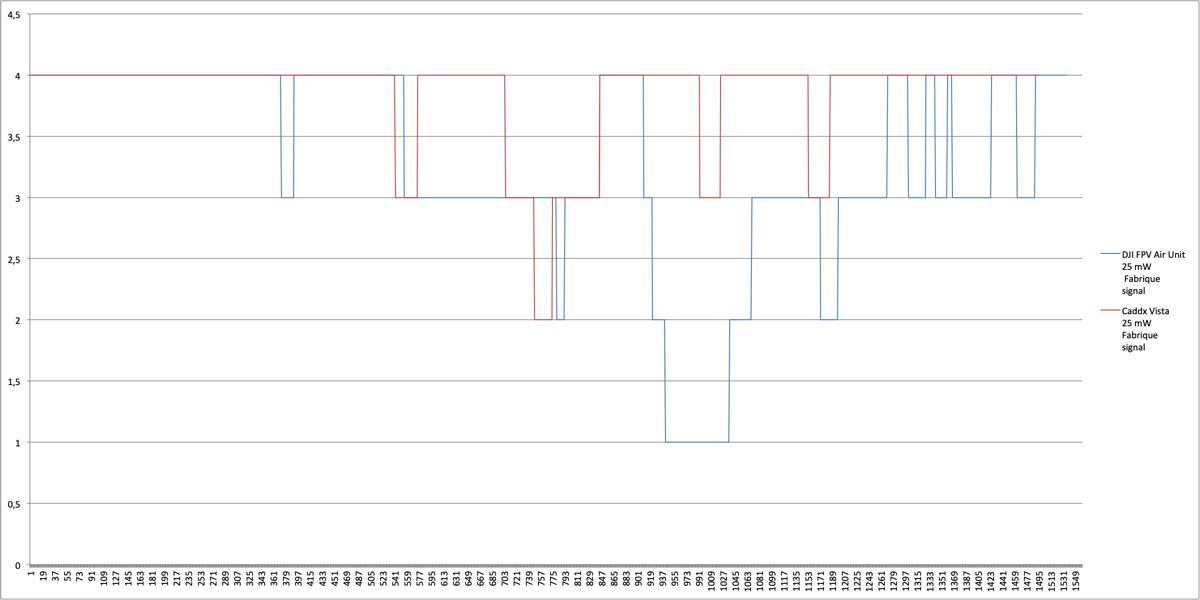
Gardez à l’esprit, en visionnant ces graphiques, que les courbes sont désynchronisées. J’ai indiqué les pics, qui ne sont pas superposés, mais qui devraient l’être en réalité. Ce que l’on constate ? La valeur du signal montre que le système Vista se comporte le mieux, mais ces deux graphiques ne sont pas très parlants.
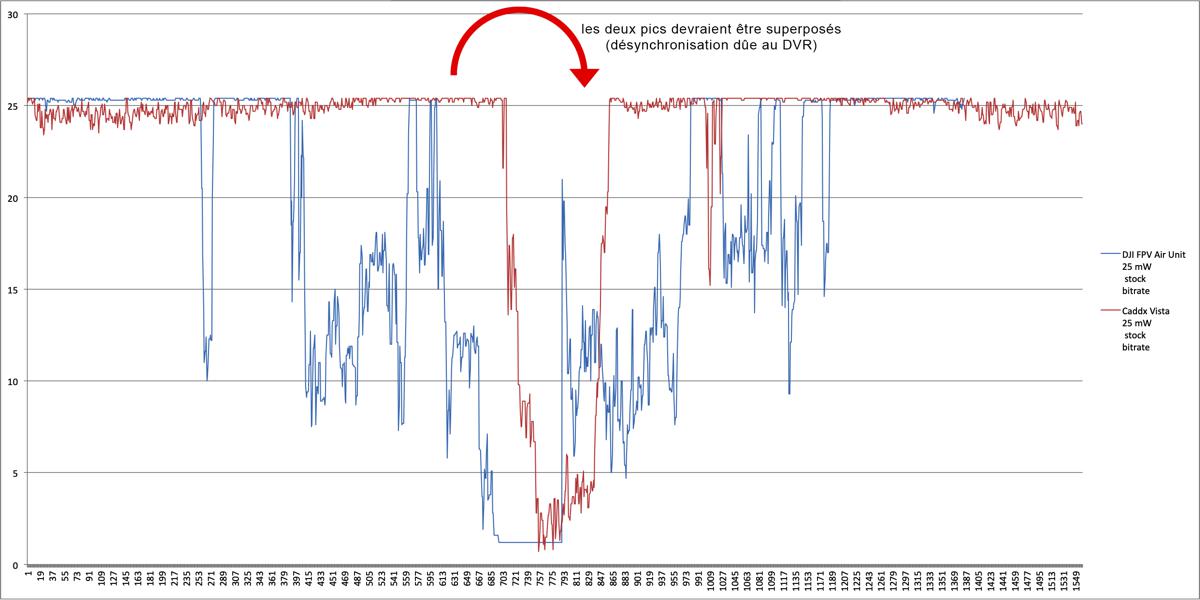
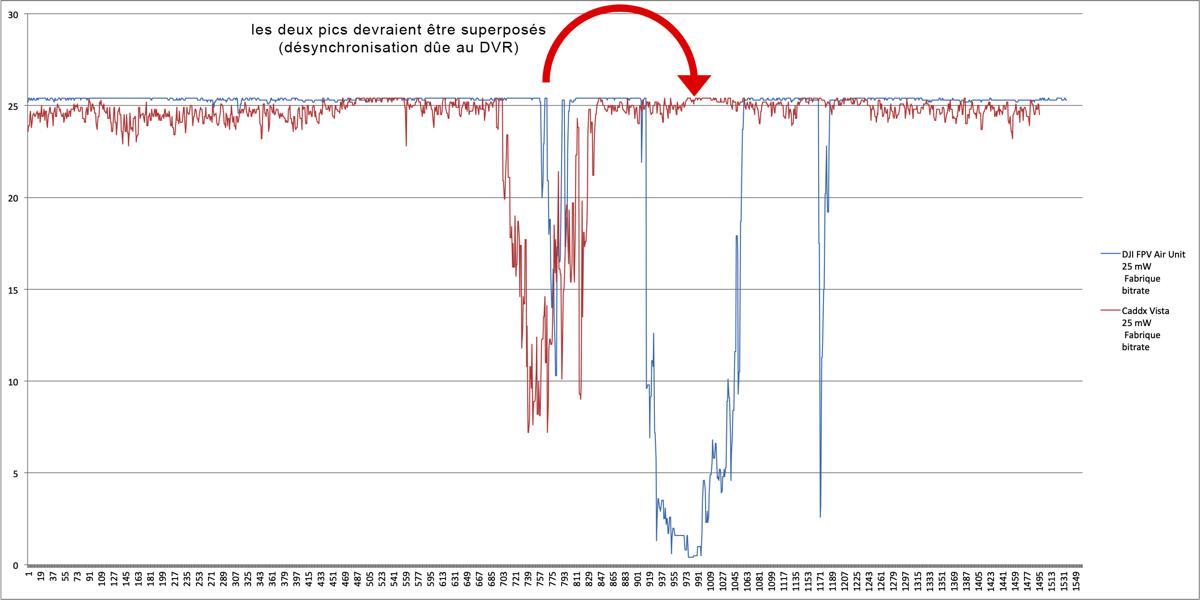
Ce qui est plus intéressant, c’est la courbe du bitrate (le débit des données). Plus la courbe est haute meilleur est le bitrate. Dans des conditions optimales, le bitrate est très légèrement inférieur avec le Vista et très variable à courte distance et sans obstacles. Le bitrate du FPV Air Unit souffre en revanche de nombreux pics assez bas. Avec des obstacles, le bitrate du FPV Air Unit tombe presque à 0, pour une image figée, mais sans perte de la connexion, alors que le Vista continue à fonctionner. Avec les antennes de La Fabrique, il y a une amélioration pour les deux systèmes. Elle est globalement très nette pour le FPV Air Unit, et importante pour le Vista en présence d’obstacles.
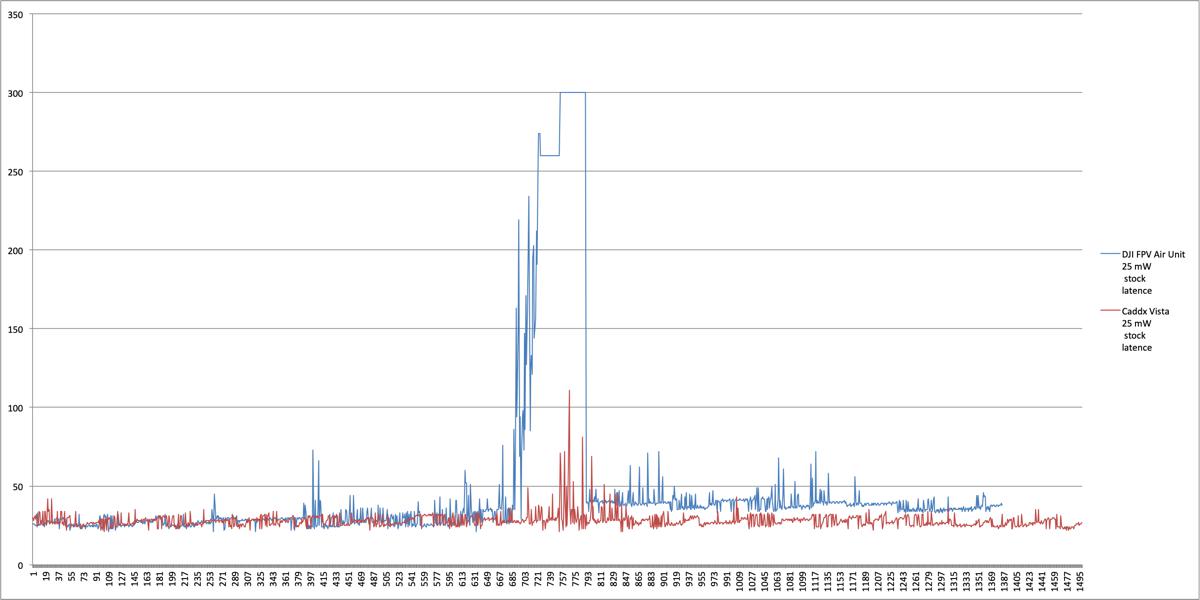
La courbe de la latence est plus simple. Plus elle est basse, plus la latence est faible et meilleur est le résultat en vol. Les courbes du FPV Air Unit et du Caddx Vista sont très semblables, avec tout de même globalement quelques pics de latence pour le FPV Air Unit. Derrière des obstacles, la latence grimpe en flèche avec le FPV Air Unit, au-delà de ce qui est praticable en immersion. Elle peine ensuite à revenir à la normale. Les antennes de La Fabrique gomment les pics de latence, principalement pour le Vista, beaucoup moins pour le FPV Air Unit.
 La conclusion ?
La conclusion ?
 Les vidéos et les mesures confirment mes impressions en vol : le système Caddx Vista se débrouille globalement mieux que le FPV Air Unit, et ce malgré son unique antenne ! Le signal est conservé plus longtemps lorsque les conditions sont plus difficiles, la latence est faible et le bitrate plus élevé, sauf dans des cas particuliers et des pics. Reste maintenant à comprendre pourquoi… Les vols à plus longue distance feront l’objet d’un autre post. Un deuxième enseignement de ces vidéos et mesures ? On gagne à utiliser les antennes directionnelles de La Fabrique Circulaire à la place de celles d’origine de DJI. Mais cela, aussi, fera l’objet d’un autre post…
Les vidéos et les mesures confirment mes impressions en vol : le système Caddx Vista se débrouille globalement mieux que le FPV Air Unit, et ce malgré son unique antenne ! Le signal est conservé plus longtemps lorsque les conditions sont plus difficiles, la latence est faible et le bitrate plus élevé, sauf dans des cas particuliers et des pics. Reste maintenant à comprendre pourquoi… Les vols à plus longue distance feront l’objet d’un autre post. Un deuxième enseignement de ces vidéos et mesures ? On gagne à utiliser les antennes directionnelles de La Fabrique Circulaire à la place de celles d’origine de DJI. Mais cela, aussi, fera l’objet d’un autre post…


Excellent test Fred et très intéressant. Merci.
Il serait intéressant de voir avec d’autres antennes au cul du air unit voir si on obtiendrait le même décalage. L’antenne sur la Vista étant de chez TrueRC si je dis pas de connerie, doit impacter pas mal
De plus ça serait utile aussi car on entend beaucoup parler des antennes au niveau du casque mais peu au niveau du air unit. Je pense que cet article est une bonne entrée en matière 😉
Il est aussi possible que le Vista tourne avec un firmware plus récent/optimisé, et que DJI le mette dans la prochaine upgrade pour leur matériel…. juste une théorie.
@Olivier C. : Sortie de boite c’est possible que ce ne soit pas la même version. Mais les deux fonctionnent avec le même firmware, développé par DJI.
@ Fred : As tu testé les puissances d’émission des deux systèmes ? Il s’est déjà vu d’énormes différences entre deux VTx de marques différentes. Même si les deux sont réglés en 25 mW, le Vista déborde peut être et pourrait expliquer ses meilleurs résultats 😉
Encore un SUPER travail de notre @fred national !!
Bravo et MERCI pour ce comparatif qui à le mérite d être le premier d’une longue série sur ce sujet et ces produits ! 😉
Je rejoint @Teddy sur la puissance d’émission. Curieux également comme @Bol2riz (que je salue au passage) sur la possibilité d’un choix different d’antennes, coté Air Unit.
Bon vol à tous !
Salut à tous et un grand merci à Fred pour ces tests(et ceux pas encore publiés) 😉
Pour faire un complément d’info,j’ai eu l’occasion de faire des tests(mesures) sur le système DJI goggles et Airunit samedi dernier avec Marc Porral (président à vie d’Airgonay ;)) et Florian Grisard qui nous a amené son système DJI ,merci à eux deux pour leur présence et leur soutien:
-les antennes du masque sont apparemment des simples dipôles (un scan rayon x de ces antennes a été publié sur le net) donc en polarisation linéaire,3 étaient bonnes sur le banc,la dernière plutôt très mauvaise…
-les antennes air unit d’origine sont bonnes et identiques .
-2 antennes Singularity MMCX de Trurc ont été aussi mesurées avec des résultats digne d’antenne chinoise très base qualité(c’est peut être pas à moi de le dire j’en conviens mais j’ai été surpris et déçu de ces mesures)
-nous n’avons pas réussi à mesurer des puissances de sortie du Air unit cohérente aux puissances annoncées par le constructeur(plusieurs méthodes sur plusieurs appareils de mesure ) mais avons constaté un écart de 13db entre la puissance mini(mode 25mw) et maxi(mode 1200mw)(13db donne environ un x8 sur la puissance rf exprimée en mw donc un passage possible de 100mw a 800mw… sans pour autant avoir mesurer ces valeurs …)
-la puissance RF Air unit ne bouge pas quand on éloigne le masque(même en condition difficile) ,qq soit la puissance sélectionnée au masque
-le Air unit consomme jusqu’à 15w en entrée donc devrait sortir la puissance RF annoncée par le constructeur,pas de différence significative de consommation en entrée du Air unit entre 1000mw et 1200mw
-la bande passante totale du signal RF est d’environ 25mhz et est composée d’une zone centrale et de 2 zones secondaires de chaque coté, espacées de la zone central.
-plus étonnant,le signal rf à la Air unit est coupé quand le masque perd la vidéo et reprend difficilement quand la liaison vidéo revient(le signal rf reprend alors son niveau initial maxi),le signal RF à la Air unit n’émet donc pas en continu même quand le masque perd la vidéo.
-nous n’avions pas de Caddx Vista lors de ces tests….
-Jay-
-La Fabrique Circulaire-
super intéressant cet article merci @fred
Salut Mon Critof 😀
Salut jay, ça fait plaisir de te voir par ici. Merci pour tes retours et merci à Marc pour ses tests d’antennes diverses et variées.
Jay pense tu proposer des antennes dédiées au système DJI ? Ou un combo cohérent de ce que tu as déjà développé même ? Tant pour le masque que pour le air unit 😉
@Jay, je viens de finir de lire ce que tu as reporté et c’est assez flippant (si je comprends bien)…
« -nous n’avons pas réussi à mesurer des puissances de sortie du Air unit cohérente aux puissances annoncées par le constructeur(plusieurs méthodes sur plusieurs appareils de mesure ) mais avons constaté un écart de 13db entre la puissance mini(mode 25mw) et maxi(mode 1200mw)(13db donne environ un x8 sur la puissance rf exprimée en mw donc un passage possible de 100mw a 800mw… sans pour autant avoir mesurer ces valeurs …) »
Donc nous n’avons pas la plage vendue sur le papier
« -la puissance RF Air unit ne bouge pas quand on éloigne le masque(même en condition difficile) ,qq soit la puissance sélectionnée au masque »
Pour cette partie je suis pas certain de comprendre si c’est bien ou non. Idéalement ça devrait bouger ?
-la bande passante totale du signal RF est d’environ 25mhz et est composée d’une zone centrale et de 2 zones secondaires de chaque coté, espacées de la zone central.
Peux-tu à partir de ça donner des recommandations sur les canaux à préférer par hasard ?
« -plus étonnant,le signal rf à la Air unit est coupé quand le masque perd la vidéo et reprend difficilement quand la liaison vidéo revient(le signal rf reprend alors son niveau initial maxi),le signal RF à la Air unit n’émet donc pas en continu même quand le masque perd la vidéo. »
Ça c’est la partie flippante ! Cela est il aussi vrai et en simultané pour la liaison avec la radio DJI ?
Merci
Je pense que les antennes hélix permettent de se faire un avis. Mais il aurait fallu tester avec des ORT Quad Shield qui sont calibrées pour le Air Unit. Sinon oui la vista est un poil meilleure.
@ JoFPV : Oui, c’est prévu. Mais c’est un budget, parce qu’il n’y a pas que les ORT en lice…
petite rectification de mon post; les Singularity Truerc longue que j’ai mesurés sont en SMA et pas en MMCX(donc pas d’adaptateur,mesure en direct)
VSWR a 3 @5600mhz,2@5700,1.5@5800,2@5900,3@6000mhz,elles sont « aceptable » a 5800 +/- 30mhz
@Bol2riz
on avait pas de radio rc DJI ,on ne sais pas comment fonctionne la télémétrie(link up/down radio/masque/air unit)on a pas mesuré la puissance ni visualisé les signaux au niveau du masque,on c’est concentré sur le Air unit et on a rien mesurer de cohérent niveau puissance RF,les puissances maxi visualisés sur les différents CH étaient identique(pas de variation selon le CH),les antennes Air unit ont un pic de resonance a 5600mhz(+/-50mhz) et sont très bonne sur toute la plage, tout se qu’on sait c’est que ca marche et plutôt bien mais on ne sait pas comment ni pourquoi….je vais refaire une série de test avec d’autre protocoles prochainement….
Hello,
Merci pour ce test. De mon côté, c’est curieux mais j’ai une perception complètement opposée : mon vista semble clairement plus sensible aux effets de masquage que mes 2 air unit (test réalisé avec les antennes d’origines sur les VTX, et deux antennes TrueRC X-Air sur le masque). Constat que j’avais attribué au fait que le caddx n’est pourvu que d’une seule antenne et rayonne donc, à priori, de façon moins homogène.
@ TB250 : Peut-être est-ce lié aux conditions du test ? Si les tiennes sont reproductibles avec un vol automatisé, je peux essayer de mesurer…
Re,
Mes conditions de tests sont beaucoup moins poussées que les tiennes. Mais je pensais mes observations tout de même relativement robustes. Je passe souvent par les mêmes endroits en dive entre les arbres par exemple, et dans ces conditions, la réception est meilleure avec mes quads sous air unit.
Le problème c’est que d’autres paramètres peuvent venir perturber ces observations (qualité de l’alimentation, bruit généré par les ESC, etc).
Pour les mesures, pas de souci si tu passes un jour dans l’Est !
@ TB250 : Ah, c’est vraiment bizarre, ça, parce que justement, c’est en me baladant dans arbres de mon club, là où je ne vais généralement pas parce que je perds la liaison, que j’ai constaté la différence entre les deux. J’ai fait les mesures pour vérifier ça en vidéo et en chiffré. Si l’un des deux m’avait contredit, j’aurais laissé tomber.
@ Fred:
Tu dois avoir passé également pas mal de temps sur l’écosystème de DJI maintenant… Juste une question : quel est ton ressenti global par rapport à de l’analogique ? Avec quel type de retransmission vidéo voles-tu essentiellement maintenant ?
A plus !
TB250
@ TB250 : J’ai clairement totalement délaissé l’analogique, que je réserve aux tests de matériel. Pour le plaisir, c’est la solution de DJI… Ca va plus loin, ça donne une seconde jeunesse à mes vols, je me fais des séances de cruising les plus longues possible. Je suis allé sur la côté normande en début de semaine avec le Tyro129 équipé DJI. Malgré le vent de Dennis, c’était un bonheur sur les falaises…
J’avoue que j’ai très peu utilisé ByteFrost de FatShark, j’ai donc peu d’éléments de comparaison avec le concurrent numérique.
Re,
Même constat de mon côté, c’est vraiment une petite révolution… Avant j’étais surtout amateur de course en mode tendue (beaucoup de passages plein gaz pendant les races), mais désormais j’ai baissé mes rates et vole surtout pour admirer le paysage et faire de la voltige cool…
Salut fred, quelle autonomie max as tu avec quelle batterie sur ton tyro 129 ?merci
@ Ludovic Iglesias : En vol mid-range, c’est-à-dire sans pics de conso, je suis à 10 minutes avec le FPV Air Unit à bord et une
6S4S de 1000 mAh.Merci Fred, ah ouai c’est pas mal du tout.