BetaFPV Beta95X, le test (et Caddx Vista)
 Le Beta95X de BetaFPV constitue une rupture dans les gammes des nano racers de la marque. Pourquoi ? Parce que c’est le premier modèle qui dispose d’un retour vidéo numérique ! Le choix de BetaFPV s’est porté vers le kit Vista de Caddx, composé d’une caméra DJI et d’un boitier d’émission radio et vidéo compatible avec le Digital FPV System de DJI. En d’autres mots, ce kit permet de piloter avec un retour en 720p numérique avec l’aide du casque FPV et de la radiocommande de DJI. Alors, ça vaut le coup de sauter le pas et de passer au numérique ? Réponse dans cette chronique. Dommage que la météo n’ait pas été coopérative pendant mes essais…
Le Beta95X de BetaFPV constitue une rupture dans les gammes des nano racers de la marque. Pourquoi ? Parce que c’est le premier modèle qui dispose d’un retour vidéo numérique ! Le choix de BetaFPV s’est porté vers le kit Vista de Caddx, composé d’une caméra DJI et d’un boitier d’émission radio et vidéo compatible avec le Digital FPV System de DJI. En d’autres mots, ce kit permet de piloter avec un retour en 720p numérique avec l’aide du casque FPV et de la radiocommande de DJI. Alors, ça vaut le coup de sauter le pas et de passer au numérique ? Réponse dans cette chronique. Dommage que la météo n’ait pas été coopérative pendant mes essais…
La vidéo
Tour du propriétaire
 Le Beta95X est plus grand que les précédents nano racers de chez BetaFPV, avec une diagonale de moteur à moteur de 10 cm et des dimensions de 14 x 14 x 7 cm. L’ossature principale de l’appareil est un X en carbone d’une épaisseur de 2,5 mm. Les protections d’hélices sont fixées à cette structure carbone, prises en sandwich avec les moteurs et servant d’amortisseurs. Ces moteurs sont des brushless 1106 à 4500KV qui entrainent des hélices Gemfan tripales de 6,3 cm (2540). Elles sont disposées en mode « props out », c’est-à-dire dans le sens contraire de celui par défaut de Betaflight. Les moteurs sont reliés à l’électronique centrale par des connecteurs – donc théoriquement faciles à changer en cas de souci.
Le Beta95X est plus grand que les précédents nano racers de chez BetaFPV, avec une diagonale de moteur à moteur de 10 cm et des dimensions de 14 x 14 x 7 cm. L’ossature principale de l’appareil est un X en carbone d’une épaisseur de 2,5 mm. Les protections d’hélices sont fixées à cette structure carbone, prises en sandwich avec les moteurs et servant d’amortisseurs. Ces moteurs sont des brushless 1106 à 4500KV qui entrainent des hélices Gemfan tripales de 6,3 cm (2540). Elles sont disposées en mode « props out », c’est-à-dire dans le sens contraire de celui par défaut de Betaflight. Les moteurs sont reliés à l’électronique centrale par des connecteurs – donc théoriquement faciles à changer en cas de souci.
A l’intérieur ?
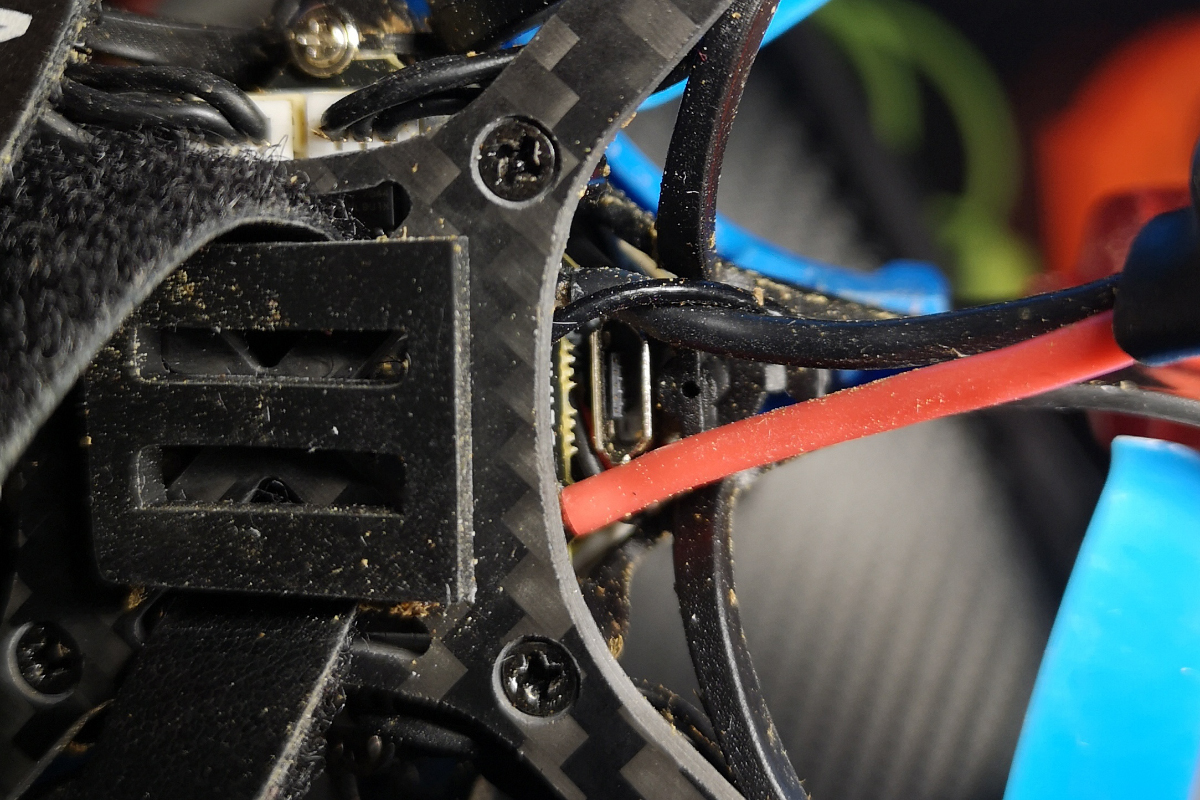
 L’électronique est concentrée au centre de Beta95X, cachée sous un carénage rigide qui semble trop grand, trop haut, avec de larges parties ouvertes. Ce n’est pas un hasard : ces parties ajourées sont nécessaires pour assurer un flux d’air pendant le vol et refroidir les composants. Parce qu’à l’intérieur de ce petit carénage, ça chauffe ! Le contrôleur de vol est un intégré qui comprend un processeur F4, flashé avec Betaflight, ainsi qu’un ESC 4 en 1 de 16A BLheli_32. J’ai testé une version du Beta95X équipée d’un récepteur Crossfire Nano RX de TBS. Il est placé sous le contrôleur de vol, avec une antenne flexible à deux fils – à vous de les fixer comme vous l’entendez. BetaFPV fournit pour cela deux tubes qui peuvent être fixés à l’arrière des protections d’hélices. Il faut les sécuriser pour qu’ils ne s’échappent pas en cas de crash ou même d’atterrissage un peu brusque. Le connecteur de batteries est un XT30, qui attend des batteries 3S ou, c’est préférable, des 4S. La batterie est fixée sous l’appareil, avec un Velcro et l’aide d’un patin antidérapant.
L’électronique est concentrée au centre de Beta95X, cachée sous un carénage rigide qui semble trop grand, trop haut, avec de larges parties ouvertes. Ce n’est pas un hasard : ces parties ajourées sont nécessaires pour assurer un flux d’air pendant le vol et refroidir les composants. Parce qu’à l’intérieur de ce petit carénage, ça chauffe ! Le contrôleur de vol est un intégré qui comprend un processeur F4, flashé avec Betaflight, ainsi qu’un ESC 4 en 1 de 16A BLheli_32. J’ai testé une version du Beta95X équipée d’un récepteur Crossfire Nano RX de TBS. Il est placé sous le contrôleur de vol, avec une antenne flexible à deux fils – à vous de les fixer comme vous l’entendez. BetaFPV fournit pour cela deux tubes qui peuvent être fixés à l’arrière des protections d’hélices. Il faut les sécuriser pour qu’ils ne s’échappent pas en cas de crash ou même d’atterrissage un peu brusque. Le connecteur de batteries est un XT30, qui attend des batteries 3S ou, c’est préférable, des 4S. La batterie est fixée sous l’appareil, avec un Velcro et l’aide d’un patin antidérapant.
La partie FPV ?
 Nous l’avons vu, BetaFPV a parié sur le Digital FPV System de DJI, qui a désormais fait ses preuves (voir le test ici). Mais l’outil choisi est le système Vista de Caddx, une alternative qui repose sur la caméra originale de DJI, et sur un boitier un peu plus petit et léger que le FPV Air Unit de DJI. C’est ce qui a permis de le loger à l’intérieur du carénage du Beta95X ! L’angle par défaut de la caméra est assez élevé, il peut être poussé encore plus loin pour ceux qui volent vite. Deux vis servent de charnière pour régler cet angle. Le boitier Vista est doté d’une seule antenne, fixée avec un connecteur IPEX. C’est une Cherry 5,8 GHz polarisée (LHCP) de RushFPV. Elle est sécurisée par deux ergots sur le carénage, et placée à l’horizontale.
Nous l’avons vu, BetaFPV a parié sur le Digital FPV System de DJI, qui a désormais fait ses preuves (voir le test ici). Mais l’outil choisi est le système Vista de Caddx, une alternative qui repose sur la caméra originale de DJI, et sur un boitier un peu plus petit et léger que le FPV Air Unit de DJI. C’est ce qui a permis de le loger à l’intérieur du carénage du Beta95X ! L’angle par défaut de la caméra est assez élevé, il peut être poussé encore plus loin pour ceux qui volent vite. Deux vis servent de charnière pour régler cet angle. Le boitier Vista est doté d’une seule antenne, fixée avec un connecteur IPEX. C’est une Cherry 5,8 GHz polarisée (LHCP) de RushFPV. Elle est sécurisée par deux ergots sur le carénage, et placée à l’horizontale.
Les réglages de Betaflight
 Pour accéder aux réglages de Betaflight, présent en version 4.1.1, il faut connecter le contrôleur de vol à un ordi équipé de Betaflight Configurator. Ce connecteur, au format microUSB, est accessible sous l’appareil. Il faut une embase étroite et fine, sous peine d’avoir des difficultés à effectuer le branchement. La plus grande partie des réglages a été effectuée en usine, notamment les PID. Sur l’appareil que j’ai testé, équipé de Crossfire, j’ai d’abord effectué l’appairage du Nano RX. Le reste des réglages est très classique, avec la méthode d’armement, le choix des modes de vol, le Flip Over After Crash, etc. Si vous préférez utiliser la radiocommande de DJI pour piloter l’appareil, il faut d’abord vous occuper du boitier Vista…
Pour accéder aux réglages de Betaflight, présent en version 4.1.1, il faut connecter le contrôleur de vol à un ordi équipé de Betaflight Configurator. Ce connecteur, au format microUSB, est accessible sous l’appareil. Il faut une embase étroite et fine, sous peine d’avoir des difficultés à effectuer le branchement. La plus grande partie des réglages a été effectuée en usine, notamment les PID. Sur l’appareil que j’ai testé, équipé de Crossfire, j’ai d’abord effectué l’appairage du Nano RX. Le reste des réglages est très classique, avec la méthode d’armement, le choix des modes de vol, le Flip Over After Crash, etc. Si vous préférez utiliser la radiocommande de DJI pour piloter l’appareil, il faut d’abord vous occuper du boitier Vista…
Mise à jour DJI
 Le boitier Vista se comporte comme le FPV Air Unit (son nom est DJI FPV Air Unit Lite), et la procédure de mise en route est donc semblable. Il faut dans un premier temps mettre le casque de DJI à jour avec la version V01.00.0400 (ou mieux s’il y a), c’est à partir de celle-ci que Vista est pris en charge. Ensuite, il faut mettre à jour, dans la même version, le boitier Vista. Pour cela, il faut le brancher en USB-C – le connecteur est facile d’accès, mais il est probable que vous deviez retirer l’hélice avant droite pour éviter de forcer. Il suffit de retirer 2 vis. Ensuite il faut brancher une batterie, de préférence bien chargée pour ne pas tomber en rade d’alimentation pendant une procédure de mise à jour. Laquelle est fort heureusement assez rapide. Il faut passer par le DJI Assistant 2 (DJI FPV Series) pour PC Windows et Mac. Attention, ce n’est pas le même outil que pour les Mavic.
Le boitier Vista se comporte comme le FPV Air Unit (son nom est DJI FPV Air Unit Lite), et la procédure de mise en route est donc semblable. Il faut dans un premier temps mettre le casque de DJI à jour avec la version V01.00.0400 (ou mieux s’il y a), c’est à partir de celle-ci que Vista est pris en charge. Ensuite, il faut mettre à jour, dans la même version, le boitier Vista. Pour cela, il faut le brancher en USB-C – le connecteur est facile d’accès, mais il est probable que vous deviez retirer l’hélice avant droite pour éviter de forcer. Il suffit de retirer 2 vis. Ensuite il faut brancher une batterie, de préférence bien chargée pour ne pas tomber en rade d’alimentation pendant une procédure de mise à jour. Laquelle est fort heureusement assez rapide. Il faut passer par le DJI Assistant 2 (DJI FPV Series) pour PC Windows et Mac. Attention, ce n’est pas le même outil que pour les Mavic.


Merci pour ce test détaillé Fred.
A tu essayé de changer la fréquence des ESC (48 ou 96 Khz) pour voir si tu peux gagner en autonomie?
@ Risk91 : La bidouille des 48 khz est destinée aux ESC BLheli_S, là c’est un BLheli_32…
Hello, tu parles de l’utilisation de la radio DJI.
Je croyais qu’il n’y avait pas de récepteur dans le boîtier VISTA…
@fred exact j’avais pas fait gaffe.
A voir alors le future viswhoop de eachine qui lui sera en blheli_S.
En espérant que tu le test.
Hâte de voir qui sera le meilleur DJIWhoop loooool
A propos de la bidouille des 48KHz:
Ce que j’ai cru comprendre, et merci de corriger si je me suis trompé.
La bidouille c’est la possibilité d’augmenter PWM frequency à 48KHz (ou plus …96… ) au lieu des 24 standards, et ou, d’implémenter un retour telemetrique des ESC vers le FC, sans cable suppl., afin de connaître le RPM des moteurs, nécessaires à l’utilisation des RPM filter sous BTFL 4+, pour des ESC nativement sous BlHeli_S.
Cela existe nativement sous BlHeli_32, (depuis en tous les cas 32.7) et je l’ai flashé sur un Diatone 349 SX. Cela ne coûte rien, au sens ou la licence BLHeli_32, est inclue dans les ESC, avec un id spécifique, car les constructeurs ont versé des royalties aux développeurs.
L’utilisateur l’a donc payé à l’achat de l’ESC sans forcément en être conscient.
Et sous BlHeli_32 on peut également augmenter la fréquence PWM à 48KHz …, de même que modifier un grand nombre de paramètres qui influent notamment sur la puissance max des moteurs et sur leur rendement.
Il semble que le gain en autonomie avec PWM =48KHz, soit effectif uniquement sur les « tout petits moteurs ».
Les ESC des « miniWhoop » sont souvent sous BlHeli_S, version open source de BlHeli_32, et les constructeurs ne semblent pas financer ce firmware.
Jusqu’à septembre 2019 environ ?, BlHeli_S ne disposait pas d’un retour telemetrique pour les RPM, ce qui interdisait l’utilisation des RPM filter sour BTFL 4+ .
Quelques développeurs se sont attelés la question, et Fred a présenté les firmware de JESC et Jazz Maverick destinés aux ESC sous BlHeli_S.
JESC propose l’accès aux fréquences PWM de 48 et 96 KHz (j’ai flashé un Beta85XproV2 sous 48 KHz), gratuitement et une petite redevance pour bénéficier de RPM telemetry. (équivalent de la redevance initiale sous BlHeli_32).
JazzMaverick propose les 2 gratuits.
Ces évolutions pour des ESC nativement BlHeli_S sont pour l’instant limitées à certains ESC (lié aux processeurs internes si j’ai bien compris…).
Si je me souviens bien, JESC est développé par Joe Lucindo, qui est le père des BlHeli et qui a mis son code en Open source, avant BlHeli_32. Il n’est donc pas du tout le vil marchand que pensent ceux qui hurlent contre le fait que JESC RPM telemetry est payant.
Du coup pour répondre à Risk91, si les ESC du Beta95 sont compatibles BlHeli_32 V32.7, il se pourrait Fred que tu puisse augmenter la PWM frequency à 48KHz.
Y aura t’il un gain en autonomie ????
Merci d’avance pour vos compléments d’infos et d’expériences, car le sujet est relativement touffu ….
@ groove4life : Je vais voir ça 🙂 🙂
@Fred, tu n’étais jamais allé aussi loin dans ton parking, avec une réception étonnamment bonne à l’étage inférieur, surtout comparé à la séance sous les arbres pas loin de toi sur laquelle le flou est bien présent…
@ xxrexxmyxx : Oui, la descente au parking était vraiment étonnante. Je me demande si les conditions atmosphériques ne modifient pas sérieusement la réception. Dans le sous-bois, il pleut assez fort au point que j’ai du arrêter le vol, et la réception était médiocre…
Il y a quelques jours, avec un FPV Air Unit et un brouillard qui tombait en fines gouttes, j’avais une portée médiocre aussi. Quand le vent a balayé le brouillard, la portée s’est améliorée. Mais je ne sais pas s’il y a vraiment un rapport…
@Fred, si si, il y a bien un rapport! Les ondes radio n’aiment pas l’eau. S’il est difficile de voler en forêt c’est notamment à cause de l’eau contenue dans les feuilles. Si les écouteurs Bluetooth en true wireless ont autant de mal à gérer la latence, c’est encore à cause de l’eau, contenue dans le cerveau cette fois-ci!
@ xxrexxmyxx : Oui, mais à ce point, je suis tout de même étonné…
@Fred moi qui n’ai pour l’instant eu l’occasion d’essayer mon DJI FPV System qu’avec un temps pourri, avec du flou qui est apparu à juste 10 mètres de distance, ça me rassure!!…
Hello, personnellement je l’ai acheté et ce n’est que du bonheur ! Il est smooth et puissant(tout est relatif !). L’autonomie est excellente avec des 4S650mAh et encore plus avec la bidouille des 48Hz.
ciao
Je viens de faire un test batteries avec le Beta95X de chez BetaFPV avec Caddx Vista et Crossfire pour 111Gr. Je ne vais pas faire de vidéos ou de test, ce n’est pas ce qui manque sur le net, d’ailleurs : ( https://www.helicomicro.com/…/betafpv-beta95x-le-test-et-c…/ ). Avec les batteries de 850mAh, il est un peut lourd à la ressource, voir la vidéo du chat ?. En 650mAh c’est parfait. Par contre les 95c sont moins bien que les 75c.. étonnant. Pourtant il consomme à peine 6A en stationnaire, donc 0,85A x 95C = 80Ah et devrait absorber les 6A ? Mais non. ? On le voit aussi au voltage qui chute/remonte, dès l’arrêt de la machine. Où la batterie de 450mAh qui ne tient pas du tout. Du coup sur toutes j’ai à peine consommé la moitié… La même question que sur les drones de 20/30Kg revient : Faut il poser au voltage ou à la consommation… A la consommation serait trop risqué, surtout si l’on passe sous la barre des 4V par cellule. Au voltage, il faudrait compenser le drop. Exemple sur celle de 850mAh 14,8v qui remonte à 15,5v dès le posé. La différence est de 0,7v. 14,8v ( 20% de charge restante ) – 0,7 = 14,1v. Donc il faudrait poser à 14,1V en vol, qui donnerait 14,8V au posé et on gagnerait presque 30% de vol supplémentaire, soit 1min en plus. Passer de 4 à 5min. Aussi la canopy qui protège la cam… ils n’avaient plus la bonne ? Trop, pas assez, décalée, ? Sinon sans trop de vent c’est une jolie petite machine, plus discrète qu’un 5 » et avec la HD ? #Caddx #racer #vista #racer #crossFire #BetaFpv
Voila les liens des tableaux : https://www.dropbox.com/sh/gj63br0lepry4fk/AAB_iO-mk8DJ_S8jbPh462gqa?dl=0
@ Vicart : Merci Damien pour le retour d’expérience et le comparo de Lipo !
Test de ta modification des ESC de 24 à 48 Khz
Et de poser à 14,2Volt pour compenser le drop.
Décollage à 17V, on perd seulement 0,5v 🙂
Il a fait une légère pause contre la porte du garage lol
Je le trouve plus « vif » obligé de le freiner en permanence, bizarre ?
Surtout après la porte de garage, une vibration apparait avec la lumière lié au shutter, pourtant les hélices sont intactes.
J’ai aussi baissé l’inclinaison de la caméra au maximum pour voler calmement en intérieur.
La tension a vite chutée passé les 14,3 V et passée les 14V rapidement à 13,6V. Donc vide.
En le posant il est remonté à 14,15v ( 4% ) puis 14,5v ( 7% ). ( vidéo : https://www.facebook.com/vicart.damien/videos/3353211838040554/?t=135 )
Il y a 140s sur la première partie, re-décollage 422s = 562s soit 9min 22s de vol en vidant le lipo. Le vol d’origine était à 4min.
J’aurais du posé à 14,2V, pour qu’il remonte à 14,8v ( 20% ) et faire 8min 50s de vol. A la recharge il a 840mAh contre 850.
Donc on peut dire que de 4min, on passe à 8min de vol sans problème
Merci 😉
@ Vicart : 🙂 🙂 🙂
Tu étais en stab’ ? Si oui je pense que tu peux grappiller 30s en acro…
Bonjour,
Heureux possesseur du 95X en DSMX depuis peu, j’ai effectué la dernière mise à jour. Je n’arrive pas a obtenir l’affichage dans le masque de la durée de vol, ni l’état de la batterie provenant de l’OSD du masque. J’ai aussi essayé avec l’OSD de Betaflight en activant la fonction custom OSD dans le masque mais rien. Est ce quelqu’un a une idée? Merci
bonjour
existe t’il une solution pour les possesseurs de goggles de base c’est à dire avec un rx à part avec la sortie qui va bien ?
@Magic 95 repérer l’uart sur lequel est connecté le caddx vista et dans betaflight au chapitre ports, il faut actionner le bouton Configuration/MSP de l’uart en question
Vous en êtes où aujourd’hui avec vos Beta95x?
Moi je suis assez content du mien mais j’ai un peu ramé au début (parce que je suis un gros, gros nul en Betaflight)
J’avais des soucis de dérapage en lacet lors de ressources assez graves, c’est à dire: je ne pouvais simplement pas descendre sans dégringoler. Un temps j’utilisais des batteries 3S de 500mA pour alleger le tout (avec bidouille 48kHz 5 minutes de vol quand même!), puis j’ai enlevé des supports du protecteur d’helices pour améliorer le flux, puis carrément les protecteurs dans leur intégralité, et tout ça a beaucoup aidé.
C’est presque bien et c’est là, ma pomme que je me rends compte que je n’ai pas activé Air mode, et que je suis donc en Acro de la vieille école; pas étonnant de se voir dégringoler en réduisant les gaz!
Et en dernier j’ai remplacé les hélices en sucre d’origine par ce que j’avais sous la main, à savoir des LDARC 2,8 pouces rognée à 2.5 pouce avec une pince à ongles. Elles sont simplement indestructibles !
Lien: https://www.banggood.com/10-Pairs-KINGKONG-LDARC-2840-2-8X4-CW-CCW-3-blade-Propeller-1-5mm-Mounting-Hole-for-RC-FPV-Racing-Drone-p-1160372.html
Sinon très content, 5 minutes de vol sur de vielles 500mA 3S, 6 minutes plus toniques sur des 450mA 4S, et 8 bonnes minutes sur des 650 4S! Pas mal, pas mal!
@Benoit : Merci pour ton aide, j’ai essayé UART3 et UART6 fait les mises à jours, est toujours rien. Je n’arrive toujours pas a avoir l’OSD et la tension de batterie. Que faire?
@ Magic 95 : Dans le doute, inverse le rx et le tx…
@ Fred : Génial, c’était ça, une erreur de câblage d’origine !!! Super merci Fred.
Merci pour ce test détaillé du Beta95x, je me suis finalement laissé tenté !
Question de débutant : J’ai tenté de passer mon 95x en 48khz avec la méthode ci-dessus via l’outil BLheliSuite32 (avec message ESC write succesful, etc.), mais désormais le manche des gaz ne fait plus tourner les moteurs ? Même problème en revenant à 24 khz…
=> Est-ce que j’ai oublié quelquechose ds BLheliSuite32 ? Fallait-il faire ce paramétrage la radiocommande allumée ou autre?
Merci d’avance si quelqu’un à une idée !