Eachine Nano LR3 2S, le test d’un nano racer alimenté par 2 Li-ion 18650
 Les batteries (ou piles) Li-ion permettent d’espérer une autonomie supérieure à celle obtenue avec des Lipo et des LiHV. Plusieurs constructeurs ont donc décidé d’équiper des nano racers pour les alimenter avec une batterie Li-ion 18650. Il y a par exemple eu le Rekon 3 de HGLRC, qui ne m’avait pas convaincu, notamment par son absence de puissance (voir le test ici). Le Nano LR3 2 s’offre les services de 2 piles 18650. Pourquoi deux ? Parce que c’est mieux qu’une ! Du moins c’est ce qu’on espère. Que vaut vraiment cet appareil ?
Les batteries (ou piles) Li-ion permettent d’espérer une autonomie supérieure à celle obtenue avec des Lipo et des LiHV. Plusieurs constructeurs ont donc décidé d’équiper des nano racers pour les alimenter avec une batterie Li-ion 18650. Il y a par exemple eu le Rekon 3 de HGLRC, qui ne m’avait pas convaincu, notamment par son absence de puissance (voir le test ici). Le Nano LR3 2 s’offre les services de 2 piles 18650. Pourquoi deux ? Parce que c’est mieux qu’une ! Du moins c’est ce qu’on espère. Que vaut vraiment cet appareil ?
La vidéo
Tour du propriétaire
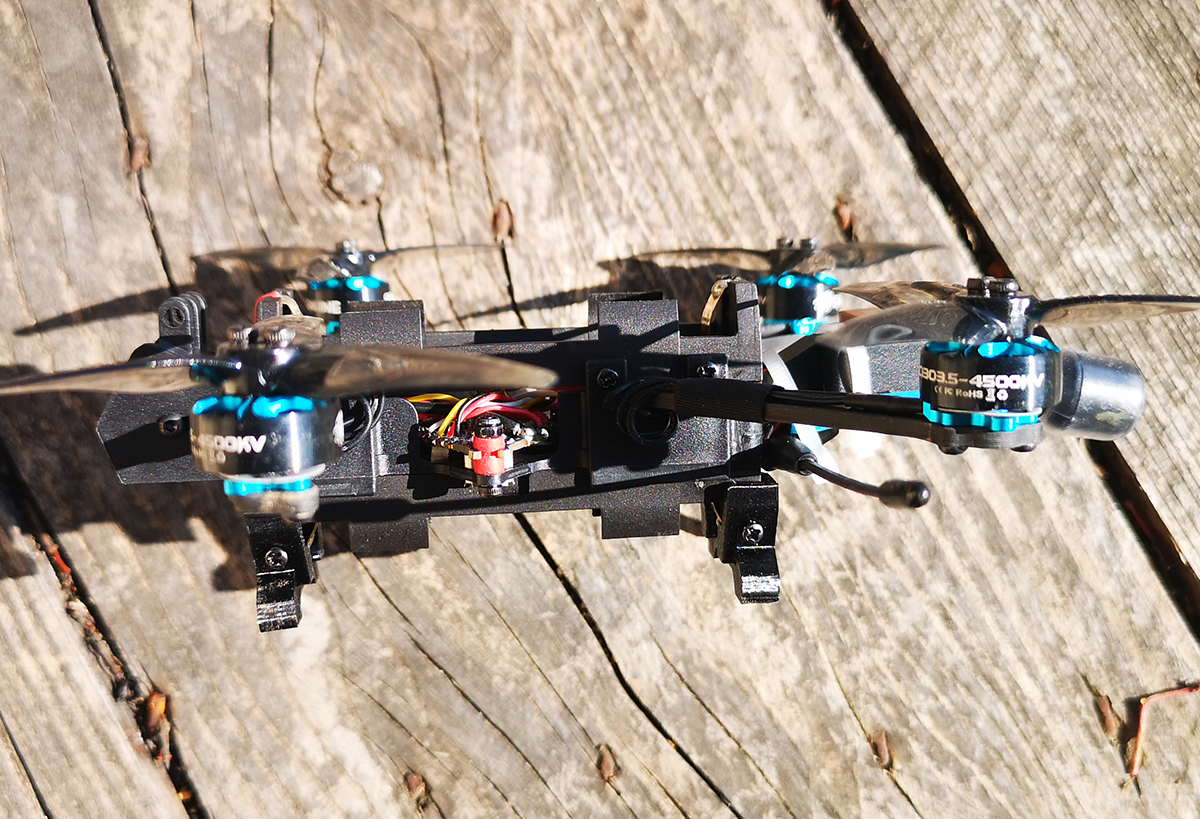
 Le Nano LR3 s’appuie sur des bras en carbone façonnés type deadcat pour diagonale de moteur à moteur de 14,4 cm. Ces bras sont emprisonnés par des pièces en plastique qui maintiennent aussi l’électronique de bord et les deux logements des piles 18650. Le contrôleur de vol dépasse légèrement de part et d’autre de la structure, avec des soudures apparentes. Le connecteur MicroUSB pour accéder aux réglages du contrôleur de vol se trouve sous la frame, facilement accessible. Un ESC 4 en 1 de 5A est intégré dans ce contrôleur de vol, qui est flashé avec Betaflight. Les moteurs sont des brushless 1303.5 à 4500KV pour des hélices tripales 3 pouces Gemfan Hurricane 3016.
Le Nano LR3 s’appuie sur des bras en carbone façonnés type deadcat pour diagonale de moteur à moteur de 14,4 cm. Ces bras sont emprisonnés par des pièces en plastique qui maintiennent aussi l’électronique de bord et les deux logements des piles 18650. Le contrôleur de vol dépasse légèrement de part et d’autre de la structure, avec des soudures apparentes. Le connecteur MicroUSB pour accéder aux réglages du contrôleur de vol se trouve sous la frame, facilement accessible. Un ESC 4 en 1 de 5A est intégré dans ce contrôleur de vol, qui est flashé avec Betaflight. Les moteurs sont des brushless 1303.5 à 4500KV pour des hélices tripales 3 pouces Gemfan Hurricane 3016.
Suite du tour
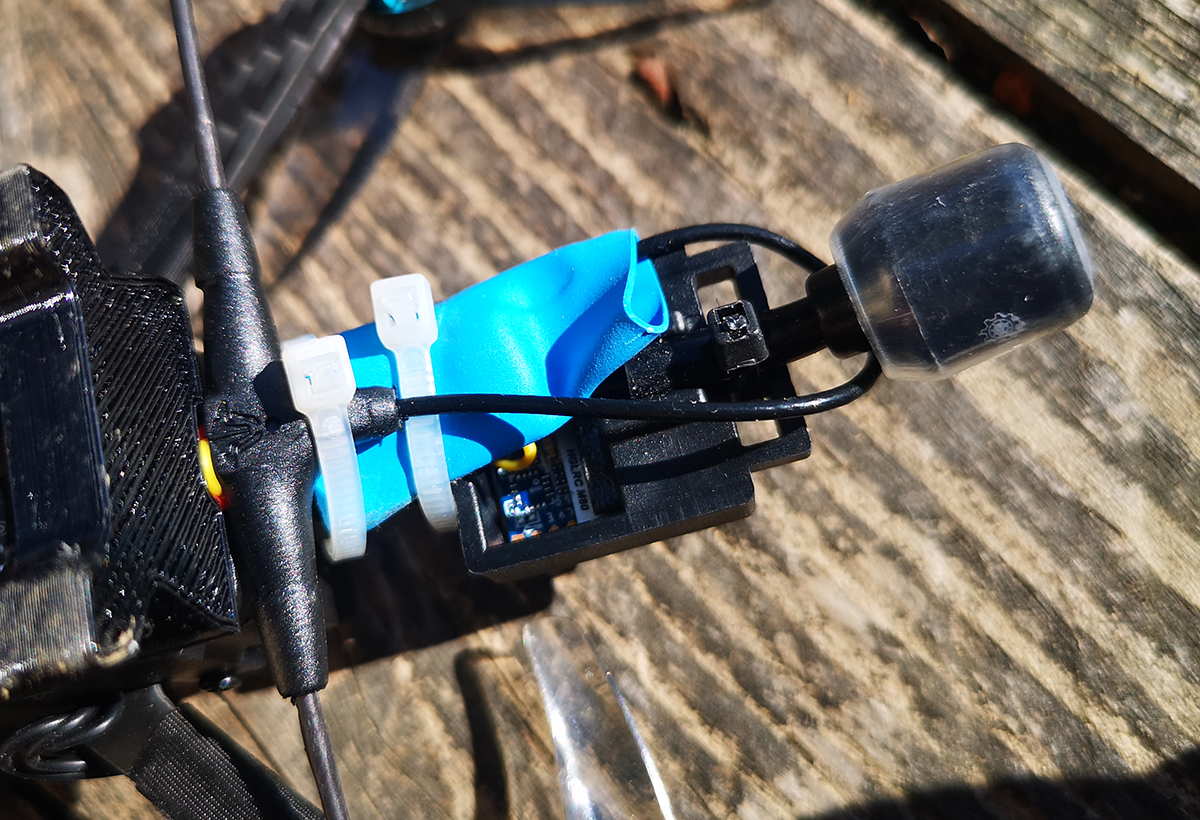
 La caméra FPV est une Caddx Nano Ant associée à un émetteur vidéo Eachine Nano V2. Analogique, en 5,8 GHz, il permet de régler une puissance de 0 mW (Pitmode), 25 mW (le maximum autorisé en France), 100, 200 ou 400 mW ! L’antenne vidéo est une Eachine polarisée. la pièce en plastique qui maintient la caméra FPV offre aussi un support pour caméra HD, de type petit format – ce n’est pas celui des GoPro. A l’arrière, on trouve un GPS, un modèle M80. Sous l’appareil ont été fixés deux pieds pour éviter que l’appareil ne repose sur le logement de la pile 18650 du bas.
La caméra FPV est une Caddx Nano Ant associée à un émetteur vidéo Eachine Nano V2. Analogique, en 5,8 GHz, il permet de régler une puissance de 0 mW (Pitmode), 25 mW (le maximum autorisé en France), 100, 200 ou 400 mW ! L’antenne vidéo est une Eachine polarisée. la pièce en plastique qui maintient la caméra FPV offre aussi un support pour caméra HD, de type petit format – ce n’est pas celui des GoPro. A l’arrière, on trouve un GPS, un modèle M80. Sous l’appareil ont été fixés deux pieds pour éviter que l’appareil ne repose sur le logement de la pile 18650 du bas.
Les emplacements pour les 18650
 Les piles sont à glisser dans leurs logements – il faut les deux pour que l’appareil s’allume. Eachine vous prévient avec un petit flyer glissé dans la boite : il n’y a pas de protection contre une inversion de polarité. En d’autres mots, il faut impérativement placer les piles dans le bon sens sous peine de griller le contrôleur de vol ! Des symboles + et – sont inscrits dans les logements, mais ils sont discrets, un peu trop. Et puis il faut savoir que la polarité n’est pas toujours indiquée sur les piles 18650 ! Il est donc recommandé de les étudier et, par précaution si ce n’est très visible, d’indiquer la polarité de chaque côté avec un marqueur… Est-ce qu’une inversion de polarité est vraiment destructrice pour le contrôleur de vol ?
Les piles sont à glisser dans leurs logements – il faut les deux pour que l’appareil s’allume. Eachine vous prévient avec un petit flyer glissé dans la boite : il n’y a pas de protection contre une inversion de polarité. En d’autres mots, il faut impérativement placer les piles dans le bon sens sous peine de griller le contrôleur de vol ! Des symboles + et – sont inscrits dans les logements, mais ils sont discrets, un peu trop. Et puis il faut savoir que la polarité n’est pas toujours indiquée sur les piles 18650 ! Il est donc recommandé de les étudier et, par précaution si ce n’est très visible, d’indiquer la polarité de chaque côté avec un marqueur… Est-ce qu’une inversion de polarité est vraiment destructrice pour le contrôleur de vol ?
A vrai dire, je ne sais pas
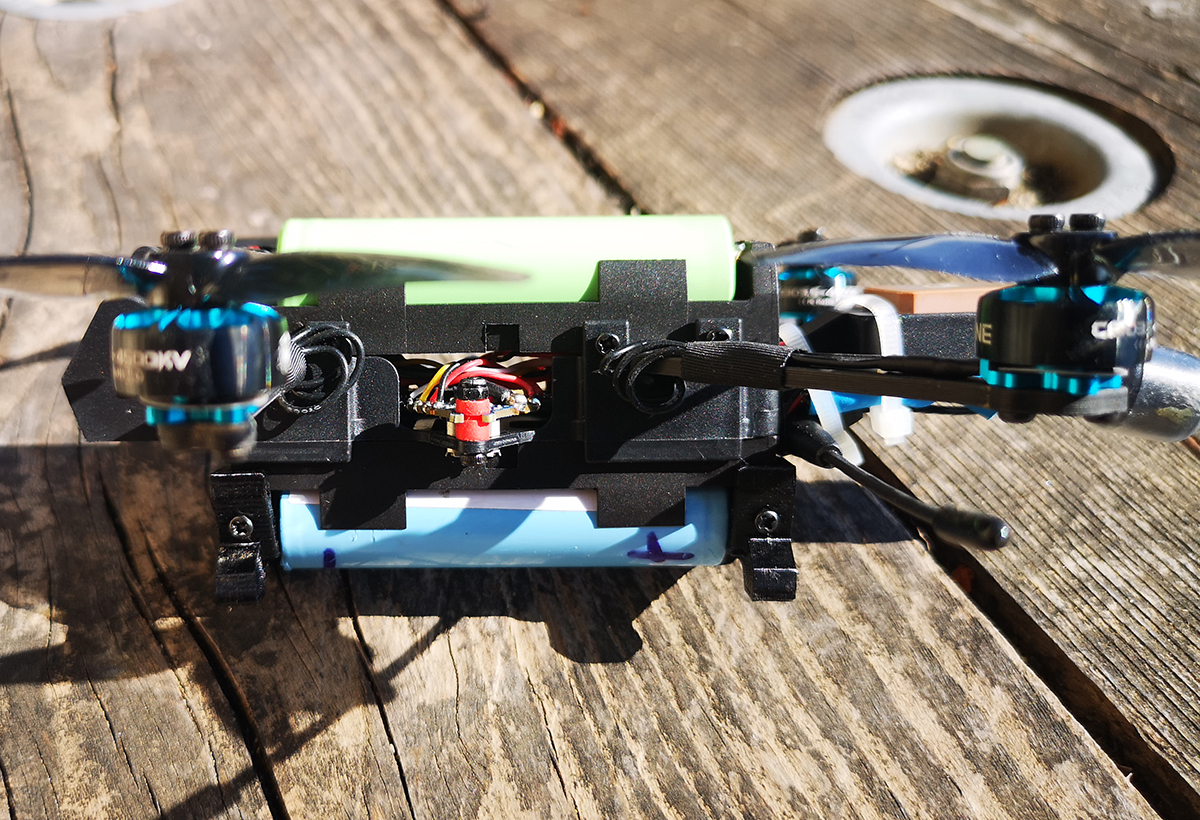 Parce que je n’ai pas pris le risque d’essayer ! Mais il est probable que ce soit le cas. Notez qu’il n’est pas facile de retirer les piles de leurs logements, il faut les pincer fort pour les tirer. Et pourtant… elles risquent de bouger en vol ! La mésaventure m’est arrivée une fois, fort heureusement quasi au sol et pendant un essai en vol à vue : la 18650 de bas s’est décrochée et l’appareil a immédiatement chuté. Le même souci en vol serait plus préoccupant. C’est sans doute la raison pour laquelle Eachine a ajouté deux gros élastiques noirs dans la boite. Ils sont destinés à entourer les logements des piles pour éviter qu’elles ne sautent.
Parce que je n’ai pas pris le risque d’essayer ! Mais il est probable que ce soit le cas. Notez qu’il n’est pas facile de retirer les piles de leurs logements, il faut les pincer fort pour les tirer. Et pourtant… elles risquent de bouger en vol ! La mésaventure m’est arrivée une fois, fort heureusement quasi au sol et pendant un essai en vol à vue : la 18650 de bas s’est décrochée et l’appareil a immédiatement chuté. Le même souci en vol serait plus préoccupant. C’est sans doute la raison pour laquelle Eachine a ajouté deux gros élastiques noirs dans la boite. Ils sont destinés à entourer les logements des piles pour éviter qu’elles ne sautent.
Mise en route
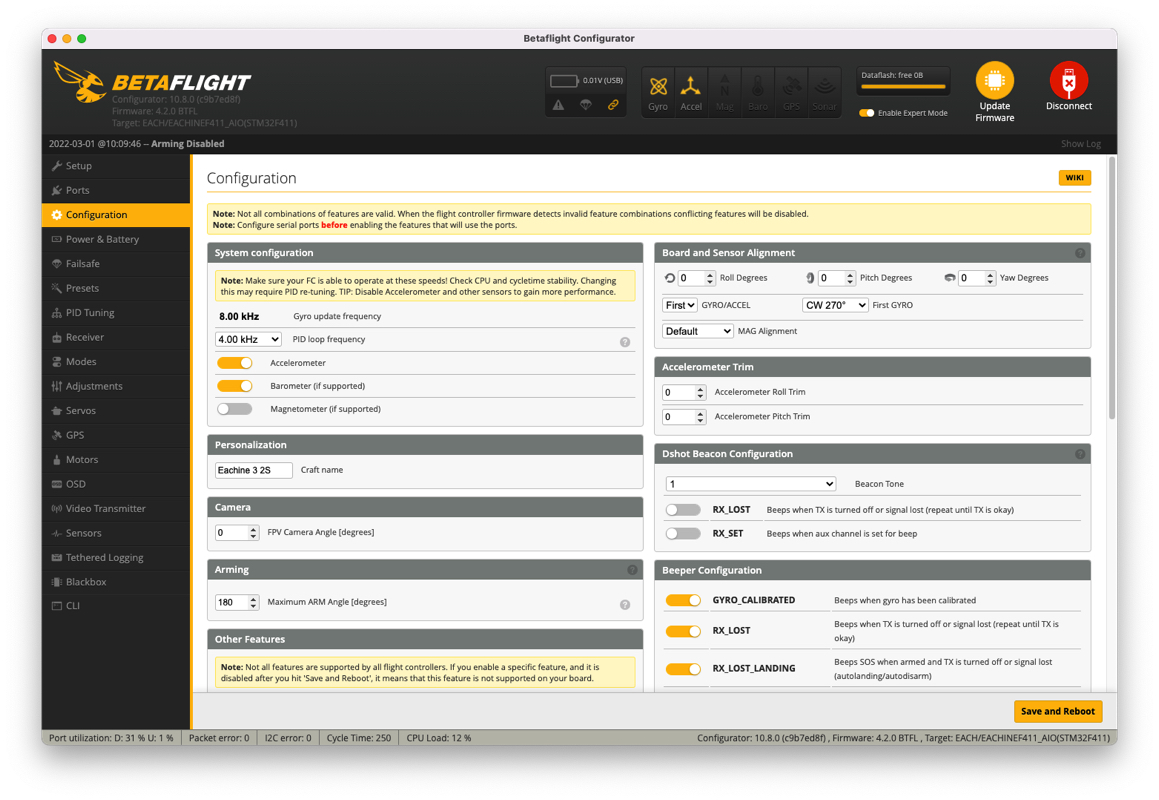
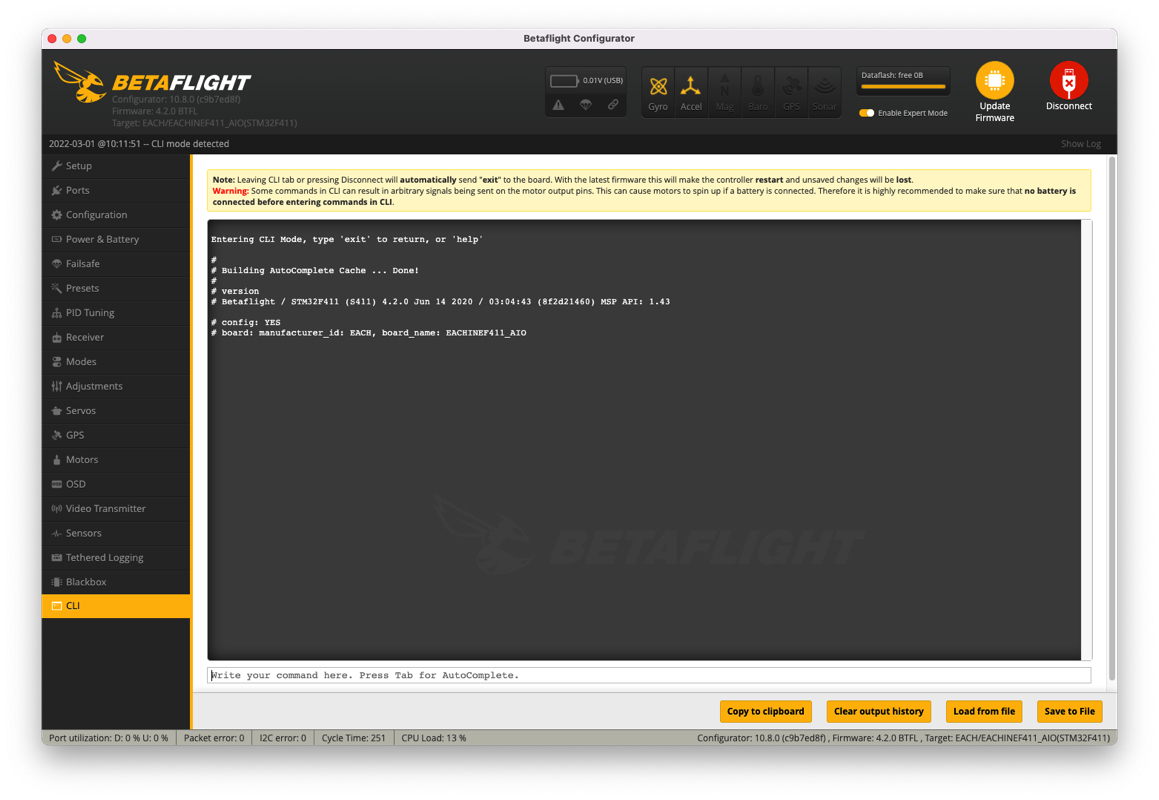
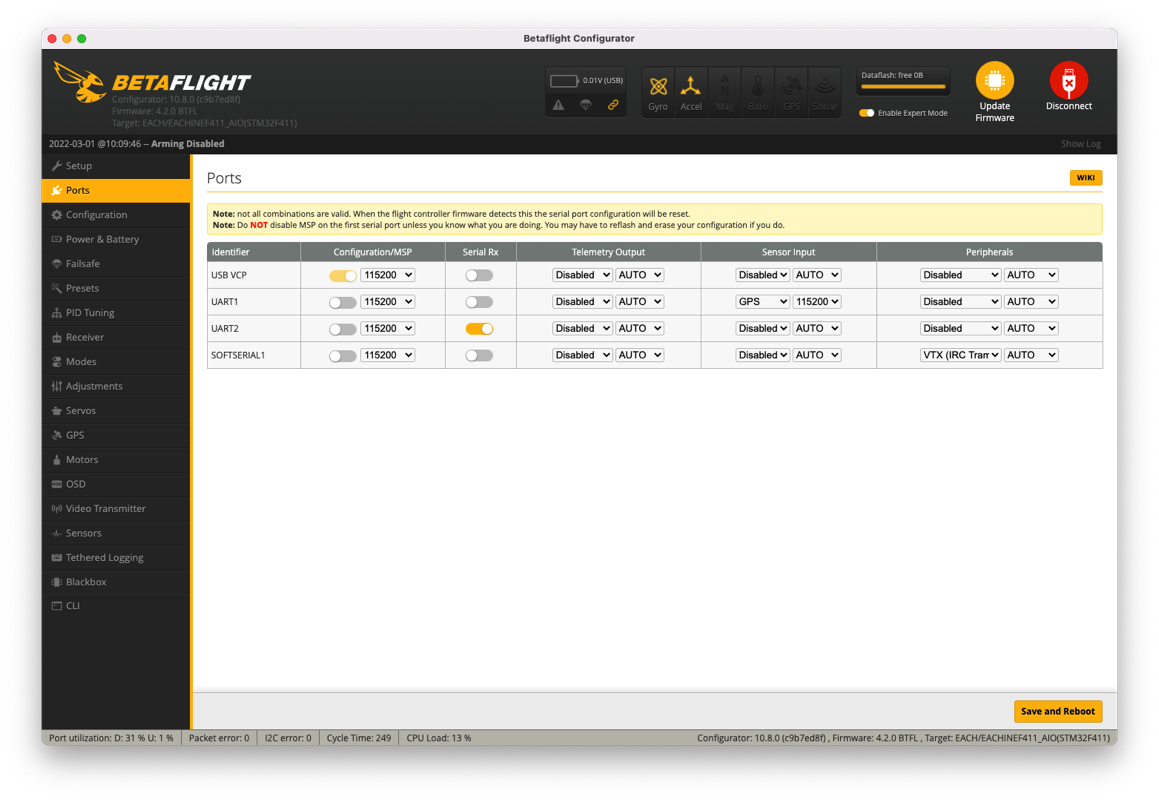 Le Nano LR3 que j’ai testé était dépourvu de récepteur radio. J’ai donc installé un Crossfire Nano RX de TBS pour être certain d’obtenir une longue portée. Il n’y a pas de place à l’intérieur de l’appareil, j’ai du le fixer avec des Rislan sous le GPS, à l’arrière. Betaflight est proposé dans sa version 4.2.0, avec un firmware EachineF411_AIO. Ce qu’il faut noter ? Le GPS se trouve sur l’UART1, le récepteur radio est sur l’UART2… et il n’y a pas d’autre UART ! La gestion via IRC Tramp de l’émetteur vidéo passe par une émulation en Softserial1. Le GPS est configuré (Ublox) avec la prise en charge de Galileo.
Le Nano LR3 que j’ai testé était dépourvu de récepteur radio. J’ai donc installé un Crossfire Nano RX de TBS pour être certain d’obtenir une longue portée. Il n’y a pas de place à l’intérieur de l’appareil, j’ai du le fixer avec des Rislan sous le GPS, à l’arrière. Betaflight est proposé dans sa version 4.2.0, avec un firmware EachineF411_AIO. Ce qu’il faut noter ? Le GPS se trouve sur l’UART1, le récepteur radio est sur l’UART2… et il n’y a pas d’autre UART ! La gestion via IRC Tramp de l’émetteur vidéo passe par une émulation en Softserial1. Le GPS est configuré (Ublox) avec la prise en charge de Galileo.
Le GPS
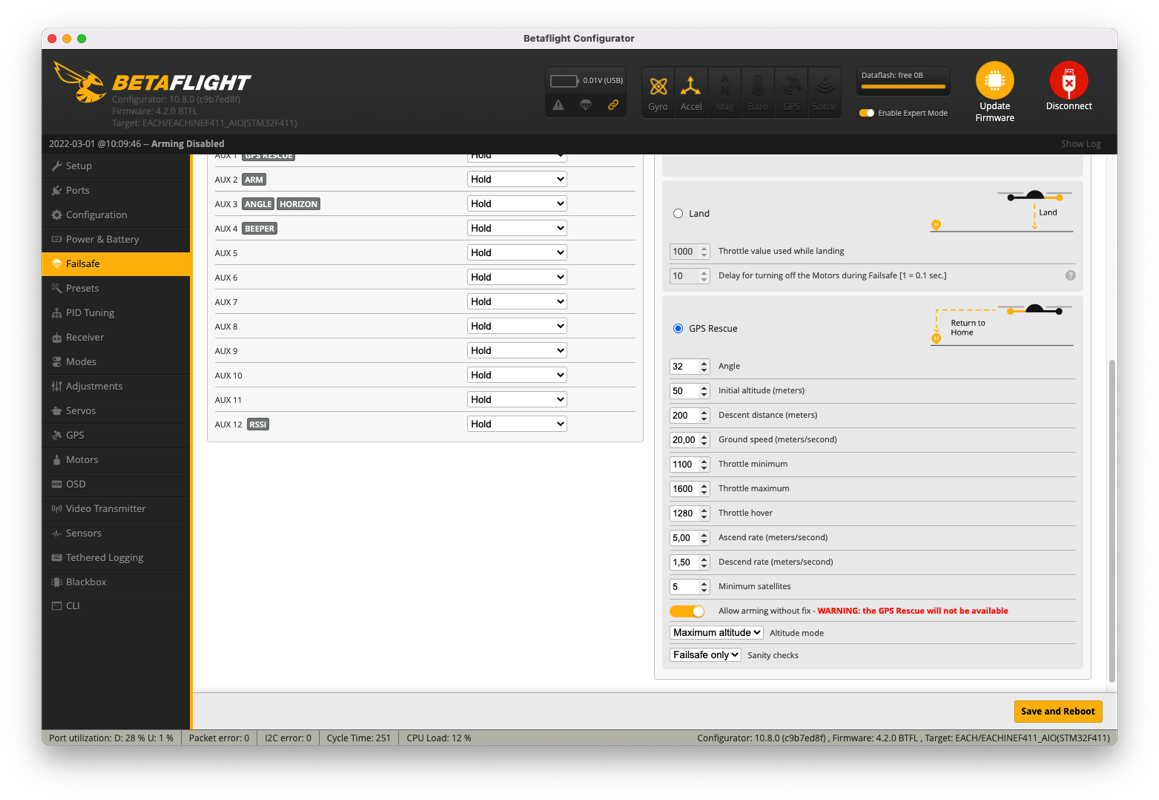
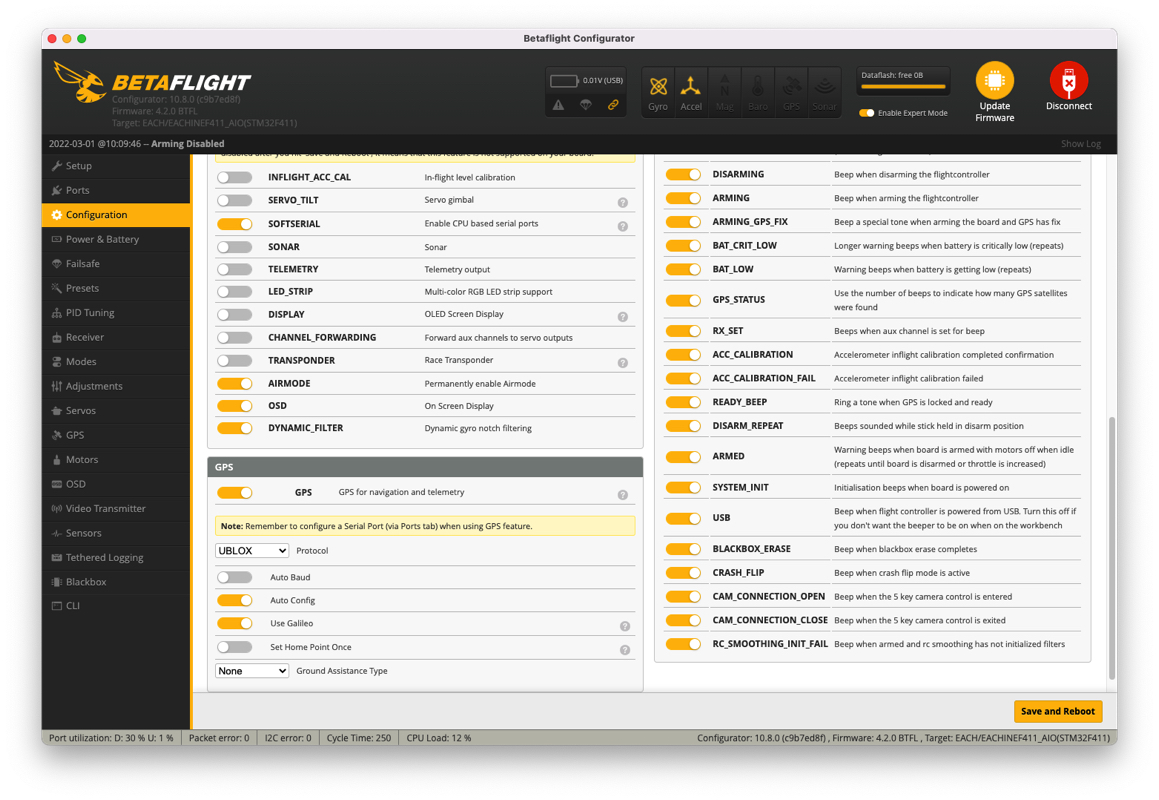
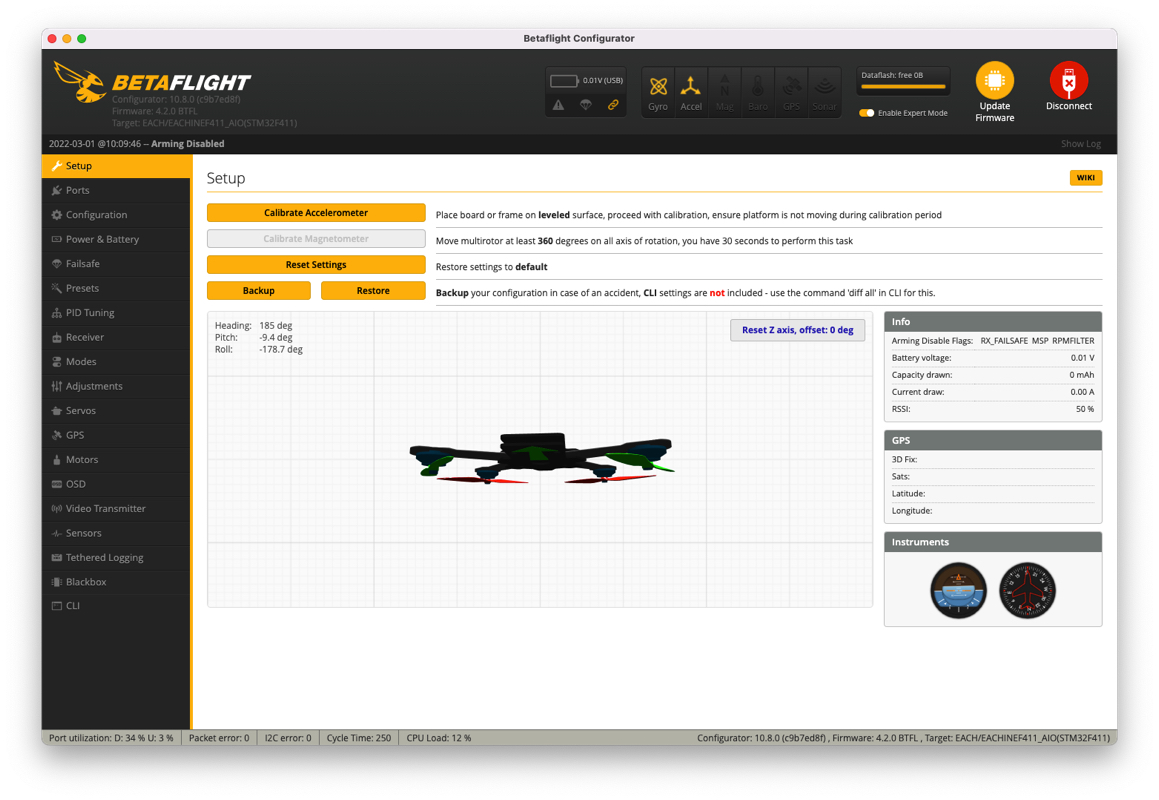
 Le failsafe, accessible en activant le mode Expert de Betaflight Configurator, est réglé sur GPS Rescue pour obtenir un retour approximatif au point de décollage à la demande ou en cas de perte de liaison radio. Il est réglé sur un minimum de 5 satellites pour décoller. J’ai préféré changer l’onglet Sanity Checks à Failsafe Only pour éviter les chutes au déclenchement de GPS Rescue. Pour mes premiers essais, j’ai aussi coché la case pour armer même sans fix GPS. Parce que ce fix GPS, il est souvent long à arriver ! Parfois il ne faut que 2 à 3 minutes, mais il m’est arrivé de ne jamais obtenir de fix, même après plus de 10 minutes de vol. C’est un peu pénible…
Le failsafe, accessible en activant le mode Expert de Betaflight Configurator, est réglé sur GPS Rescue pour obtenir un retour approximatif au point de décollage à la demande ou en cas de perte de liaison radio. Il est réglé sur un minimum de 5 satellites pour décoller. J’ai préféré changer l’onglet Sanity Checks à Failsafe Only pour éviter les chutes au déclenchement de GPS Rescue. Pour mes premiers essais, j’ai aussi coché la case pour armer même sans fix GPS. Parce que ce fix GPS, il est souvent long à arriver ! Parfois il ne faut que 2 à 3 minutes, mais il m’est arrivé de ne jamais obtenir de fix, même après plus de 10 minutes de vol. C’est un peu pénible…
Le reste de le configuration ?
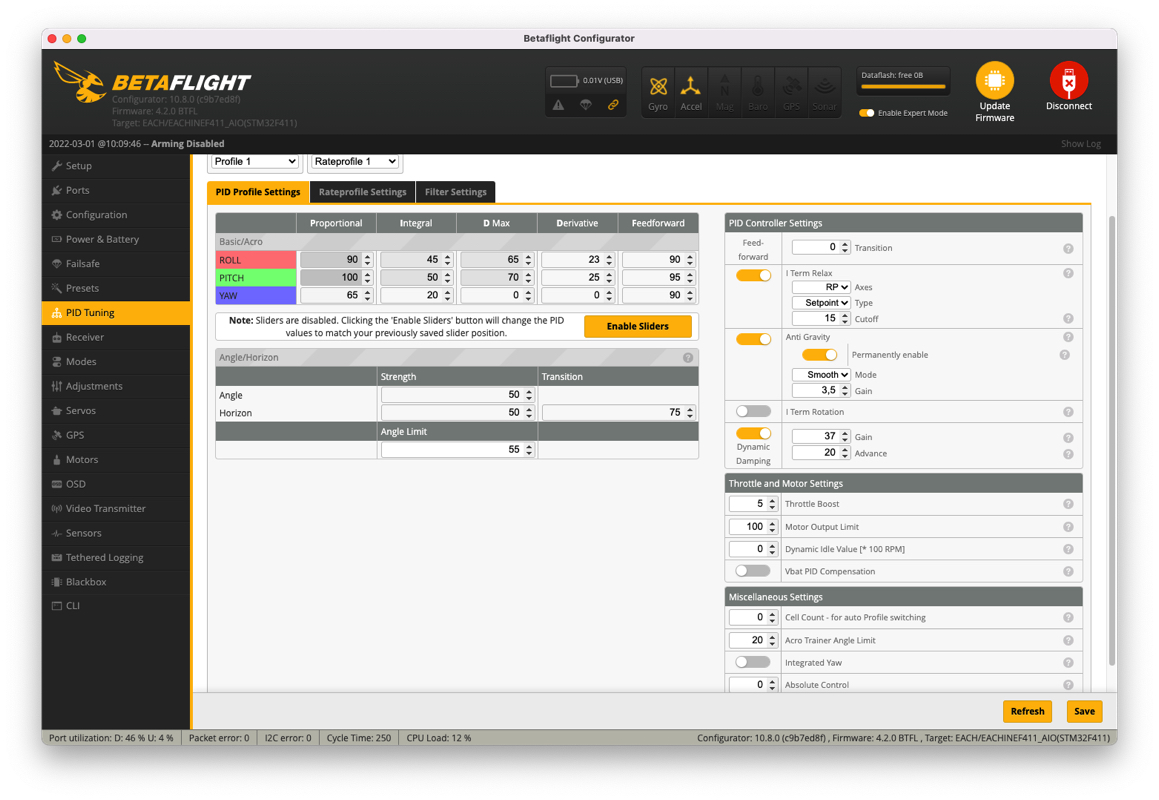
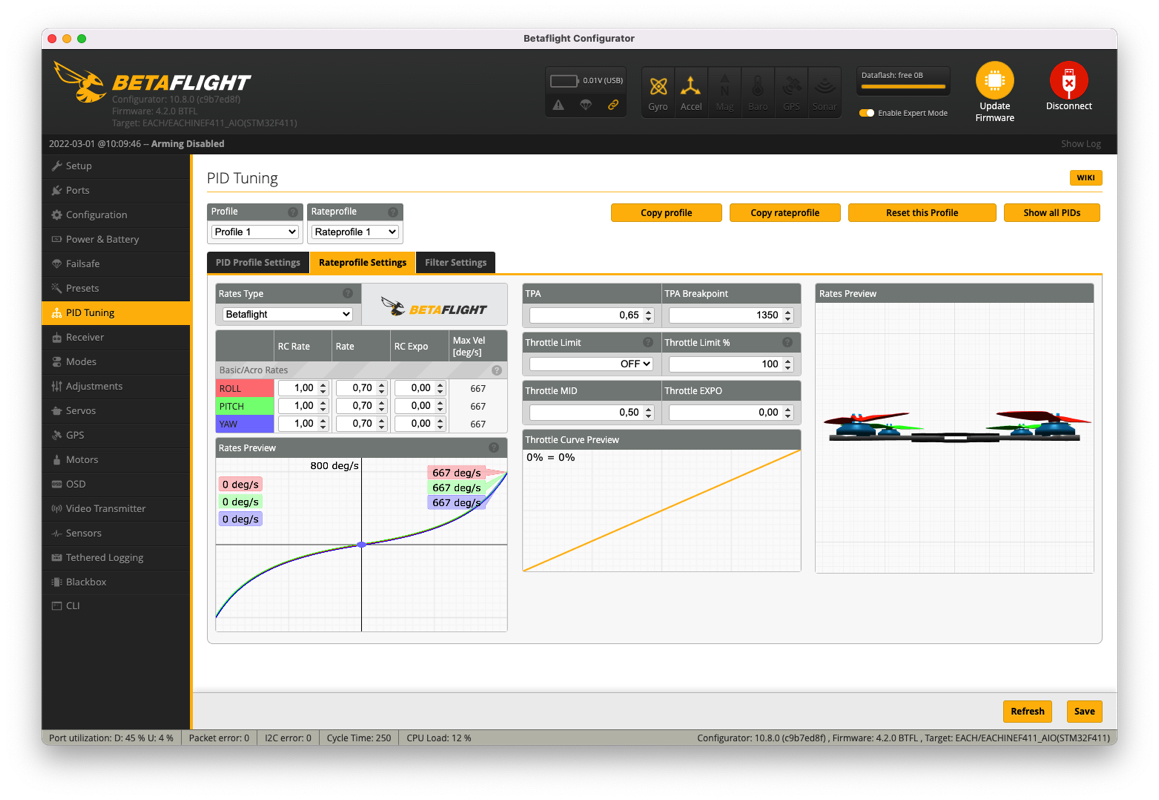
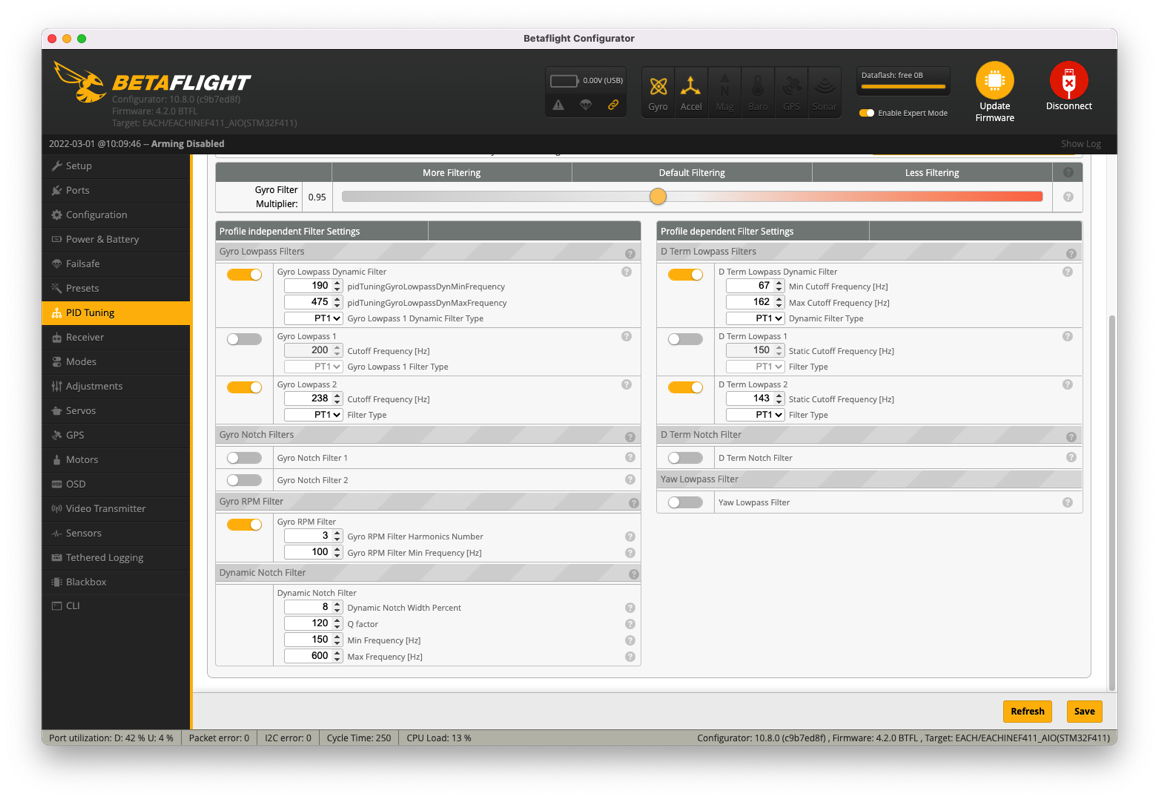
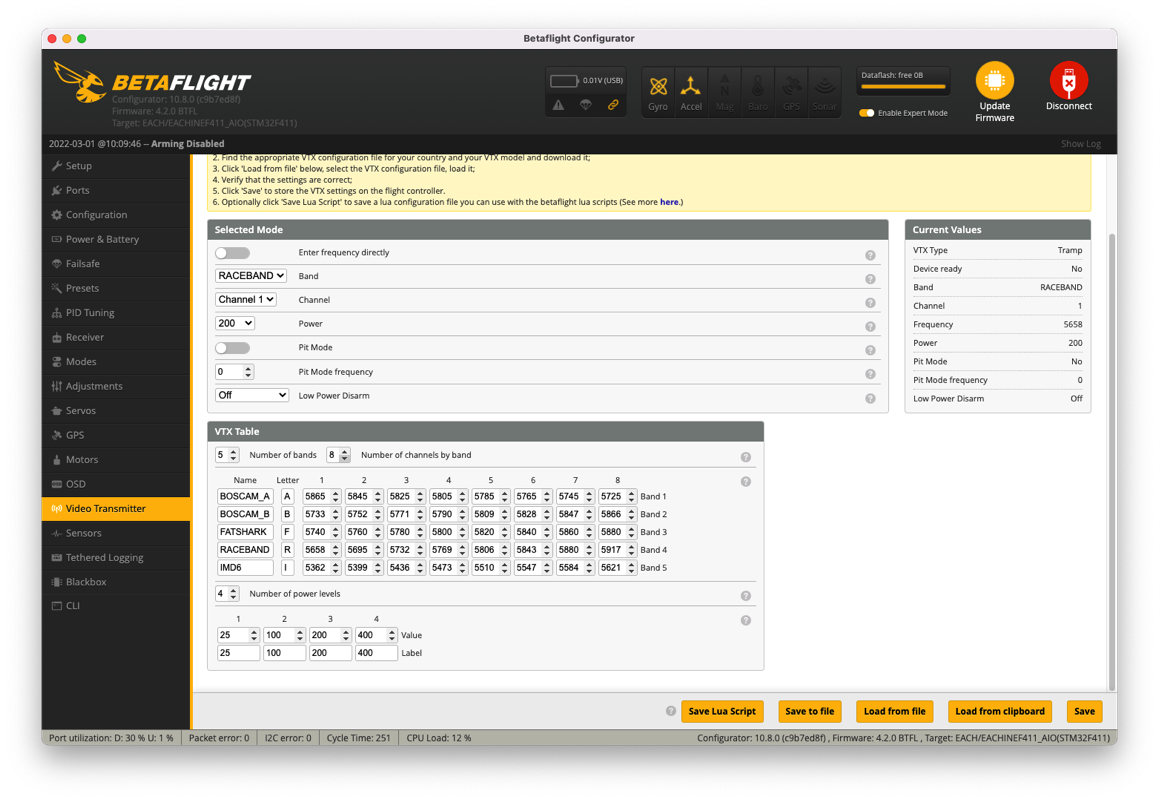
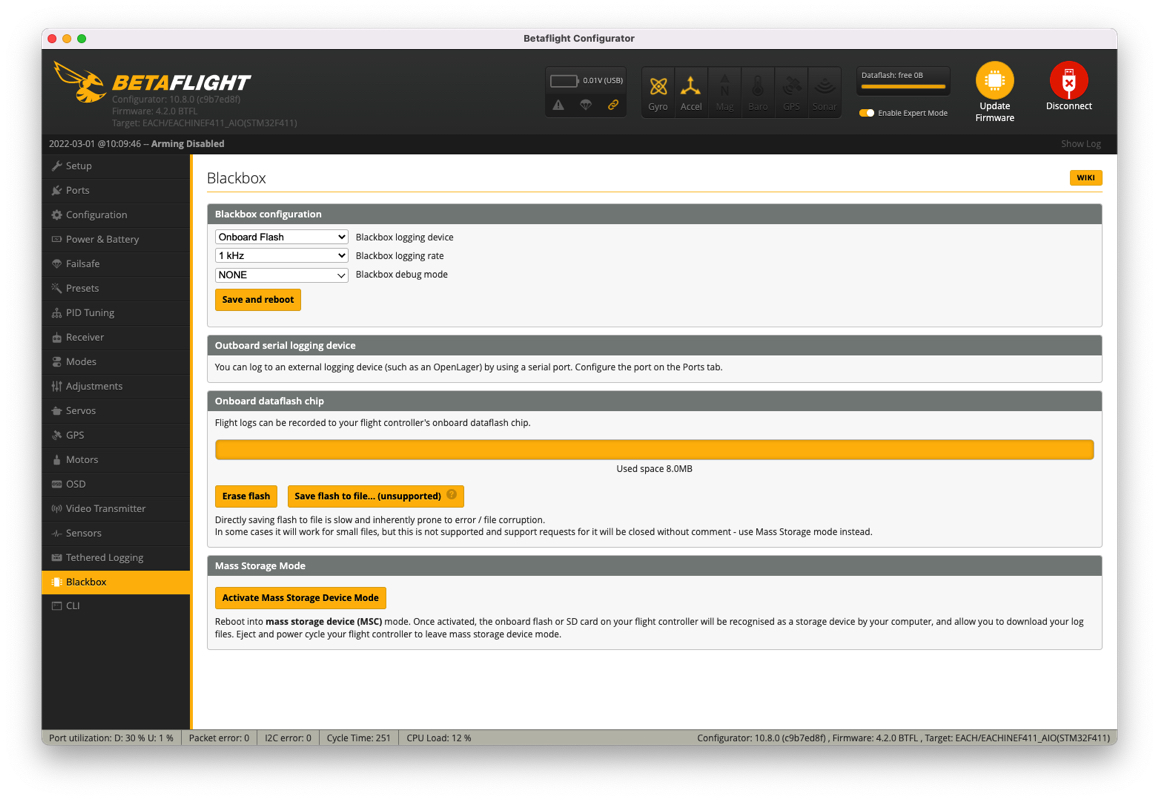
 Les PID sont entièrement réglés, les rates et les filtres aussi. Il faut prendre le temps d’associer un inter ou un bouton aux différentes fonctions, dont le GPS Rescue qui peut être activé à la demande. L’OSD est réglé aussi en usine, ainsi que la VTX Table qui permet de choisir la fréquence 5,8 GHz et la puissance entre 25 et 400 mW. Le Nano LR3 dispose d’une mémoire Blackbox de 8 Mo, à utiliser pour affiner les réglages ou pour disposer de données gyro à fournir à un outil de stabilisation en post-production tel que Gyroflow.
Les PID sont entièrement réglés, les rates et les filtres aussi. Il faut prendre le temps d’associer un inter ou un bouton aux différentes fonctions, dont le GPS Rescue qui peut être activé à la demande. L’OSD est réglé aussi en usine, ainsi que la VTX Table qui permet de choisir la fréquence 5,8 GHz et la puissance entre 25 et 400 mW. Le Nano LR3 dispose d’une mémoire Blackbox de 8 Mo, à utiliser pour affiner les réglages ou pour disposer de données gyro à fournir à un outil de stabilisation en post-production tel que Gyroflow.
Sensations en vol
 Le vol du Nano LR3 s’apparente à celui du Rekon 3 de HGLRC : il faut beaucoup de gaz pour décoller, il en faut beaucoup pour le maintenir en l’air. Et mettre plein gaz n’a pas un effet décoiffant, loin de là : l’appareil monte assez mollement. Même si on ressent un léger gain de puissance par rapport au Rekon 3, le poids des 2 piles 18650 est handicapant. L’appareil sans batterie pèse 104 grammes. Une 18650 pèse entre 48 et 50 grammes, le Nano LR3 pèse donc un peu plu de 200 grammes en ordre de vol.
Le vol du Nano LR3 s’apparente à celui du Rekon 3 de HGLRC : il faut beaucoup de gaz pour décoller, il en faut beaucoup pour le maintenir en l’air. Et mettre plein gaz n’a pas un effet décoiffant, loin de là : l’appareil monte assez mollement. Même si on ressent un léger gain de puissance par rapport au Rekon 3, le poids des 2 piles 18650 est handicapant. L’appareil sans batterie pèse 104 grammes. Une 18650 pèse entre 48 et 50 grammes, le Nano LR3 pèse donc un peu plu de 200 grammes en ordre de vol.
Mais ça vole quand même ?
 Oui, l’appareil se comporte bien, avec assez peu de vibrations même s’il y a un peu de vent… tant que les évolutions se cantonnent à du vol cruising. Mais le Nano LR3 n’est pas un appareil pour se lancer dans des figures de voltige. Il faut être prudent si vous comptez grimper rapidement pour suivre un relief, ou si vous sollicitez une brusque remise des gaz pour redresser après un dive : le Nano LR3 peinera à donner de la puissance. Ce manque de pêche handicape la fonction GPS Rescue : lorsqu’elle est activée, le racer perd de l’altitude même si vous avez poussé les réglages. La fonction n’est opérationnelle que si vous êtes suffisamment haut. Dans le cas contraire, le GPS Rescue s’achève au sol. Le GPS est donc surtout destiné à connaitre à tout moment la distance, la vitesse, la direction du point de décollage, la hauteur…
Oui, l’appareil se comporte bien, avec assez peu de vibrations même s’il y a un peu de vent… tant que les évolutions se cantonnent à du vol cruising. Mais le Nano LR3 n’est pas un appareil pour se lancer dans des figures de voltige. Il faut être prudent si vous comptez grimper rapidement pour suivre un relief, ou si vous sollicitez une brusque remise des gaz pour redresser après un dive : le Nano LR3 peinera à donner de la puissance. Ce manque de pêche handicape la fonction GPS Rescue : lorsqu’elle est activée, le racer perd de l’altitude même si vous avez poussé les réglages. La fonction n’est opérationnelle que si vous êtes suffisamment haut. Dans le cas contraire, le GPS Rescue s’achève au sol. Le GPS est donc surtout destiné à connaitre à tout moment la distance, la vitesse, la direction du point de décollage, la hauteur…
Autonomie et portée
 Avec des vols cruising, j’ai pu voler 12 minutes jusqu’à obtenir l’avertissement de batterie faible, et jusqu’à 18 minutes en poussant les 18650 dans leurs derniers retranchements. Le souci ? C’est qu’en fin de batterie, l’appareil chute brusquement sans avoir été prévenu par l’indicateur de tension. Cantonnez-vous à des vols (calmes) de 10 minutes environ pour être certain de rester en l’air. Au-delà, il y a de risques de chute. La portée vidéo dépend beaucoup de vos accessoires de réception – elle est en tous cas bien supérieure à ce que permet la réglementation qui, rappelons-le, impose un observateur en vue directe pendant les vols en immersion. Avec des antennes LX directionnelles de La Fabrique Circulaire et un récepteur RapidFire monté sur un boitier Dock-King de FuriousFPV, la portée dépasse plusieurs kilomètres.
Avec des vols cruising, j’ai pu voler 12 minutes jusqu’à obtenir l’avertissement de batterie faible, et jusqu’à 18 minutes en poussant les 18650 dans leurs derniers retranchements. Le souci ? C’est qu’en fin de batterie, l’appareil chute brusquement sans avoir été prévenu par l’indicateur de tension. Cantonnez-vous à des vols (calmes) de 10 minutes environ pour être certain de rester en l’air. Au-delà, il y a de risques de chute. La portée vidéo dépend beaucoup de vos accessoires de réception – elle est en tous cas bien supérieure à ce que permet la réglementation qui, rappelons-le, impose un observateur en vue directe pendant les vols en immersion. Avec des antennes LX directionnelles de La Fabrique Circulaire et un récepteur RapidFire monté sur un boitier Dock-King de FuriousFPV, la portée dépasse plusieurs kilomètres.
Des défauts ?
 Ajouter une caméra HD à bord est prévu et possible, mais le poids d’une Insta360 GO ou d’une GO2 handicape encore plus la réactivité de l’appareil sur les gaz. Lors de mes tests, le Nano LR3 a perdu plusieurs fois la réception GPS en vol, généralement suite à un petit choc (voir à la fin de la vidéo), et à plusieurs reprises n’a pas accroché suffisamment de satellites pour obtenir une position. C’est pénible puisqu’on perd les informations de distance, vitesse, et direction vers le point de décollage. A cela s’ajoute le fait que la fonction GPS Rescue n’est efficace qu’en volant à au moins 50 mètres de hauteur. Bien que le Nano LR3 soit petit, il reste assez bruyant, sans doute parce qu’il pèse lourd par rapport à sa taille.
Ajouter une caméra HD à bord est prévu et possible, mais le poids d’une Insta360 GO ou d’une GO2 handicape encore plus la réactivité de l’appareil sur les gaz. Lors de mes tests, le Nano LR3 a perdu plusieurs fois la réception GPS en vol, généralement suite à un petit choc (voir à la fin de la vidéo), et à plusieurs reprises n’a pas accroché suffisamment de satellites pour obtenir une position. C’est pénible puisqu’on perd les informations de distance, vitesse, et direction vers le point de décollage. A cela s’ajoute le fait que la fonction GPS Rescue n’est efficace qu’en volant à au moins 50 mètres de hauteur. Bien que le Nano LR3 soit petit, il reste assez bruyant, sans doute parce qu’il pèse lourd par rapport à sa taille.
Faut-il l’acheter ?
 Le Nano LR3 est intéressant, mais il ne permet que des vols « pépères », un peu trop pour s’amuser et partir un peu loin (là où la réglementation le permet, éééévidemment). Son principal intérêt réside dans la durée des vols, qui peut dépasser les 15 minutes. Encore faut-il en avoir l’utilité, d’autant que l’ajout d’une caméra HD à bord réduit à la fois l’autonomie et la maniabilité. Je ne recommande donc pas cet appareil : si vous désirez vous lancer dans le long-range, ou même le mid-range, mieux vaut vous tourner vers un appareil un peu plus gros capable de porter une batterie Li-ion de 3S ou 4S. Le Nano LR3 est proposé à partir de 128 € chez Banggood (taxes comprises mais hors port).
Le Nano LR3 est intéressant, mais il ne permet que des vols « pépères », un peu trop pour s’amuser et partir un peu loin (là où la réglementation le permet, éééévidemment). Son principal intérêt réside dans la durée des vols, qui peut dépasser les 15 minutes. Encore faut-il en avoir l’utilité, d’autant que l’ajout d’une caméra HD à bord réduit à la fois l’autonomie et la maniabilité. Je ne recommande donc pas cet appareil : si vous désirez vous lancer dans le long-range, ou même le mid-range, mieux vaut vous tourner vers un appareil un peu plus gros capable de porter une batterie Li-ion de 3S ou 4S. Le Nano LR3 est proposé à partir de 128 € chez Banggood (taxes comprises mais hors port).
D’autres photos









Quelles batteries 18650 as tu utilisé ? Elles ne se valent pas toute et certaines ne sont pas dimensionnées pour un usage drone qui demande de pouvoir fournir une forte intensité rapidement, ou comportent une électronique de limitation (notamment sur les batteries de cigarettes électroniques)
La Li-ion est intéressante par rapport à la Lipo que sur des vols non dynamique puisque les Li-ion supportent mal les pics d’intensité. Donc oui pas question de voltige avec cette technologie, du moins pour l’instant.
Pour le GNSS, vu la taille et le système complet, ce n’est pas étonnant que le temps de fix soit aléatoire mais sur 10min, on reste dans les specs.
Je connais pas trop de le code betaflight mais je dirais que le problème avec le retour en mode GNSS est liée a l’alimentation plus qu’en la fonction elle même ou le GNSS.
Si t’aime bien les vols dynamiques avec des bons retours d’info, tu devrais te mettre à ArduPilot ;-P
@ khancyr : J’ai utilisé une quinzaine de paires de 18650, dont des Samsung INR, des LG HG2L qui me donnent les meilleurs résultats sur des machines de 5 et 7 pouces.
Pour le fix GPS, 10 min et parfois pas du tout, c’est beaucoup face à tous les appareils équipés de puces GPS semblables et sous BF. Je me demande s’il n’y a pas un souci de placement par rapport aux autres composants.
Pour ArduPilot, pourquoi pas. Un jour 🙂
Je me permet de mettre un petit lien , d’un site qui est une petite pépite , dont je pense beaucoup de gens connaissent mais toujours bon a rappeler pour les gens qui connaissent pas : https://lygte-info.dk/review/batteries2012/CommonSmallIndividualTest%20UK.html
@ BudUAV : Yes, bon rappel, ce site est top !
Salut, j’avais investi sans des lunettes fpv et une télécommande flysky il y a quelques années… et ici avec l’arrivée des beau jour je me dit je vais aller voir si il y a pas un petit 5 pouce pour l’extérieur mais je suis étonné du peu d’offre et de dynamisme par rapport a avant,( je me trompe?)
Je n’ai plus du tout suivis les choses, il y a un résumé quelque par de tout les test actuel pour trouver mon bonheur ?
@ Vicqueray : Le marché FPV est encore très actif, j’ai simplement réduit la voilure sur les tests par manque d’intérêt. Regarde du côté de CultureFPV pour des tests récents…