Les Side Force Generators (SFG) par Shrediquette
 William Thielicke est connu sous le pseudonyme de Shrediquette, on lui doit de nombreuses structures de multirotors comme le Gemini commercialisé par TBS, le Derbe avec ses bras verticaux ou le Derbe Evo avec son pod central. Une source d’inspiration pour tous les créateurs de frames ! Son blog n’est pas très fourni, mais il est très suivi. Il vient de publier un post au sujet des Side Force Generators. C’est quoi ? Ce sont des déflecteurs à placer sous un racer pour optimiser ses trajectoires et éviter l’effet de dérapage dans les virages. Le but étant bien sûr de gagner de précieux centièmes de seconde en compétition.
William Thielicke est connu sous le pseudonyme de Shrediquette, on lui doit de nombreuses structures de multirotors comme le Gemini commercialisé par TBS, le Derbe avec ses bras verticaux ou le Derbe Evo avec son pod central. Une source d’inspiration pour tous les créateurs de frames ! Son blog n’est pas très fourni, mais il est très suivi. Il vient de publier un post au sujet des Side Force Generators. C’est quoi ? Ce sont des déflecteurs à placer sous un racer pour optimiser ses trajectoires et éviter l’effet de dérapage dans les virages. Le but étant bien sûr de gagner de précieux centièmes de seconde en compétition.
Opérationnel !
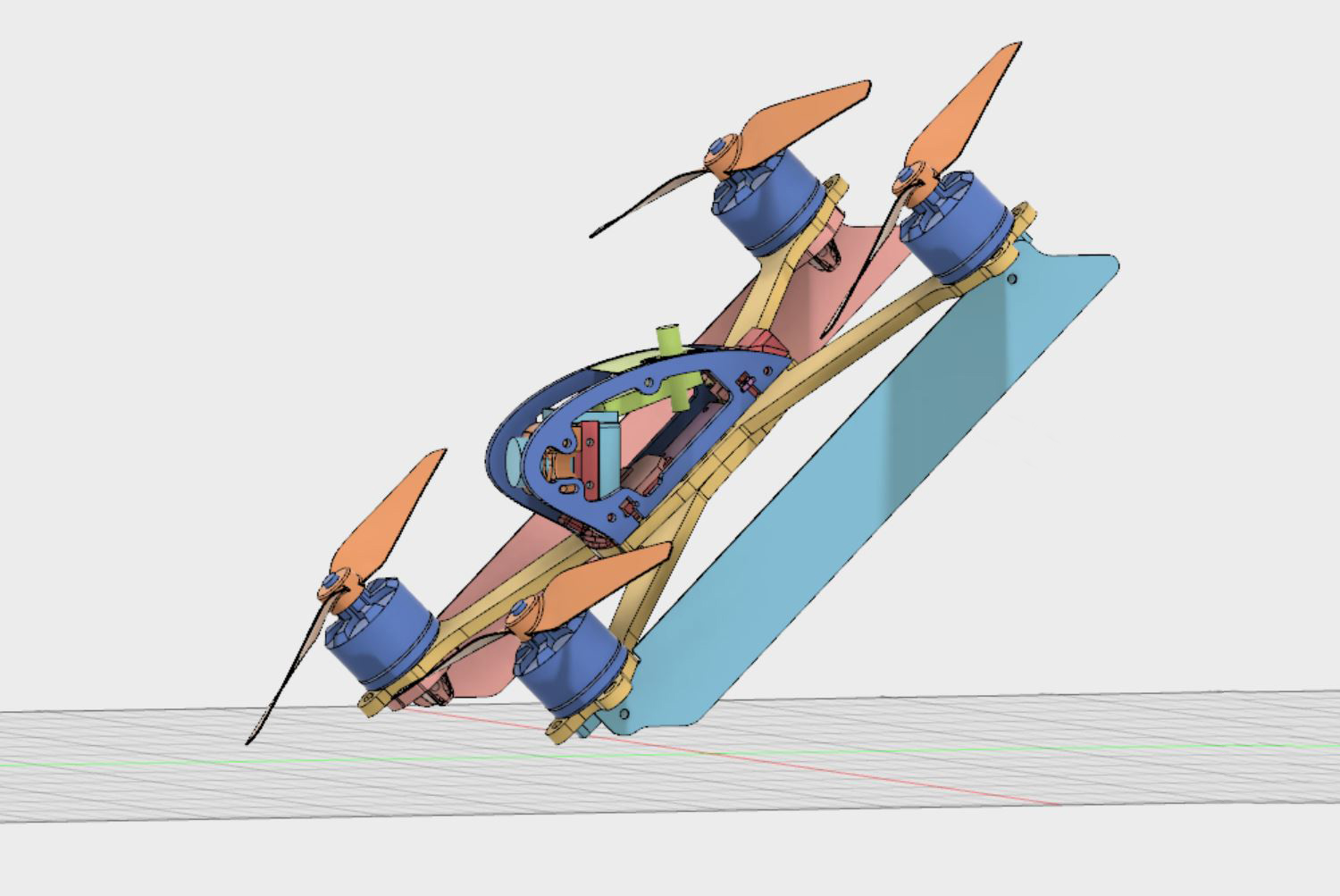
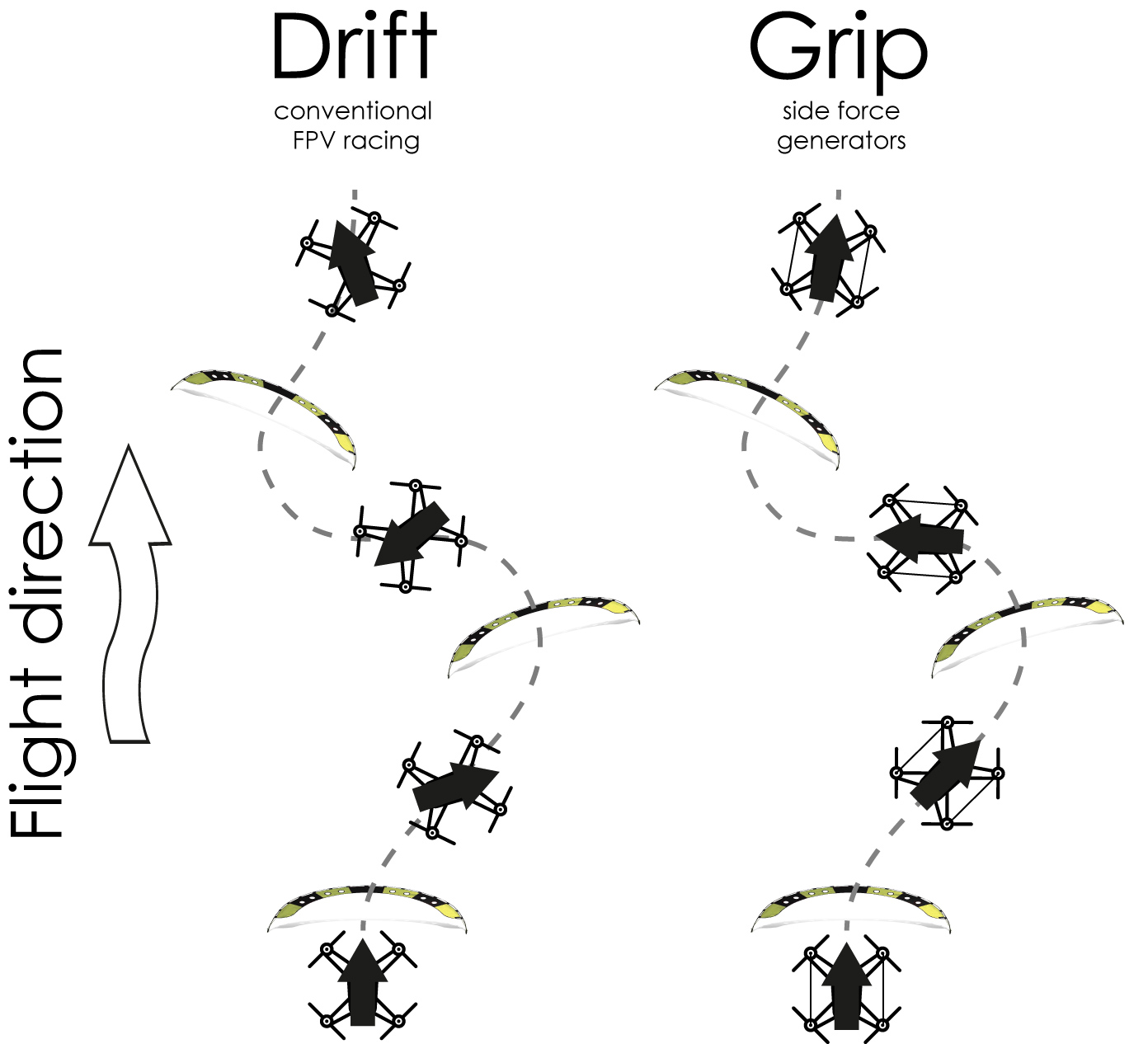 Il a procédé par essais-erreurs pour comprendre que les déflecteurs devaient être placés sous l’appareil et telle sorte que le centre aérodynamique et le centre de gravité se trouvent au même endroit. Sans quoi les SFG (Side Force Generators) ont un effet handicapant au lieu d’améliorer les trajectoires. Ca fonctionne, si on en croit ses vidéos d’essais et ses chronométrages. Des exemples de SFG sont proposés par William Thielicke sur Thingiverse, à imprimer en 3D. L’intégralité du post avec ses explications est à lire (en anglais) sur le blog de Shrediquette, ici…
Il a procédé par essais-erreurs pour comprendre que les déflecteurs devaient être placés sous l’appareil et telle sorte que le centre aérodynamique et le centre de gravité se trouvent au même endroit. Sans quoi les SFG (Side Force Generators) ont un effet handicapant au lieu d’améliorer les trajectoires. Ca fonctionne, si on en croit ses vidéos d’essais et ses chronométrages. Des exemples de SFG sont proposés par William Thielicke sur Thingiverse, à imprimer en 3D. L’intégralité du post avec ses explications est à lire (en anglais) sur le blog de Shrediquette, ici…
Les boosters de chronos !
SFG de Shrediquette, spoiler de Lethal Conception / Petit Soldat (voir ici) : il semble que le FPV racing se tourne vers de petits accessoires, qui semblent assez complexes à mettre au point, pour améliorer sensiblement les chronomètres en compétition.
Une vidéo
D’autres photos




Bonjour,
Je pense que ce n’est pas une invention, sky hero l’a fait sur l’anakin.
Si on prendrait les dernières technologies que l’on grefferait sur l’anakin, je pense que certains resteraient bouche B.
?
@ Fabrice : Ah ben oui, mais avec des déflecteurs évidés, le résultat est un peu différent…
Rhooo… et ensuite le « chausse-pied » qui permettra de mouvoir encore plus efficacement ce « spoiler » !
Plus sérieusement, rafraichissante info, car ce genre d’innovation sort de l’habituelle « course à l’armement FPV »
\o/
Cdlt
@Fabrice : sur l’Anakin, il s’agit plus d’éléments pour rigidifier la frame, voir un effet juste « qu’il est plus beau comme ça » (voir les différentes formes proposées). En effet sur l’Anakin ils étaient placés sur le coté et non sous la frame comme ici.
A confirmer ou infirmer par l’inventeur de l’Anakin. Fred, une enquête si vous plaît 🙂
À la limite, les sfg pourront au moins servir de train d’atterissage et préserver les lipo 😀
Manque plus qu’une petite dérive pilotée par un servo pour drifter précis 🙂
D’un côté je trouve l’idée plutôt intéressante, mais de l’autre, si l’idée est d’obtenir un quad qui glisse moins dans les virages… Il faudrait surtout commencer par monter un quad plus léger, et donc souffrir moins de l’inertie. Et ici, à vue de nez, on devrait pouvoir sans trop de souci faire l’économie d’une centaine de grammes. Je ne sais plus qui disait : « en vol, un gramme, c’est une tonne »… Mais ça représente bien la différence de comportement qu’on peut obtenir.
Une idée pour tous ceux qui auraient la possibilité de le développer: un module de contre-inertie.
Il faudrait programmer un moteur avec un petit disque en métal pour génerer un effet gyroscopique inverse au mouvement du quadri en temps réel.
Cela annulerai l’inertie et donnerait un contrôle quasi parfait de la machine.
Bon, après il faut trouver le moyen de faire piloter ça par Betaflight ou cleanflight, puis arriver à appliquer la force dans n’importe quel orientation (pourquoi pas une bille truffé d’aimant au centre de trois disque de bobines…) et réduire le poids… Car si c’est pour voler 26secondes ben les tests vont êtres compliqués 😛
Vous en pensez quoi ?
🙂
@ MiniSapin :
Ce que tu décris là, si je suis bien, c’est en fait le principe d’un gyroscope.
Dans la pratique, cela permettrait de lutter contre les changements d’inclinaison (et ce n’est pas du tout ce que l’on recherche sur un quad), mais cela n’aurait par contre aucune incidence contre les « glissades » dans les virages et l’inertie.
@TB250 : Effectivement, le principe est le même que celui d’un gyroscope, sauf que le gyroscope a un axe de rotation à la perpendiculaire (90°) de l’axe de rotation qu’il doit contrer.
Dans le contre-inertiel, l’axe de rotation est le même entre le disque et celui du quadri, mais avec une rotation en sens inverse de l’inclinaison que l’on souhaite contrer.
@FPV67 et aussi un stab et des ailes et un moteur monté à la verticale et comme ça on aura un appareil rapide et stable sur ses trajectoires :-p, mais il me semble que ça existe déjà 😀 Oh wait !!
@Laurent : Je pensais exactement la même chose !! A force de mettre des ailerons et des SFG ils vont réussir à nous réinventer l’avion 🙂