Projet Microquad FPV HD 720p
 C’est une réalisation « maison » par Link, qui s’appuie sur des composants existants : une bonne partie de l’appareil provient des restes d’un X4 H107D de Hubsan, qui a le mérite d’être le plus puissant de la famille des X4, et d’une caméra 808 #16 capable d’enregistrer en HD 720p. Son objectif ? La conception d’un micro-quadricoptère destiné aux vols en immersion compatible avec les fréquences de FatShark / ImmersionRC, capable d’enregistrer en HD 720p. La parole est à Link, merci à lui !
C’est une réalisation « maison » par Link, qui s’appuie sur des composants existants : une bonne partie de l’appareil provient des restes d’un X4 H107D de Hubsan, qui a le mérite d’être le plus puissant de la famille des X4, et d’une caméra 808 #16 capable d’enregistrer en HD 720p. Son objectif ? La conception d’un micro-quadricoptère destiné aux vols en immersion compatible avec les fréquences de FatShark / ImmersionRC, capable d’enregistrer en HD 720p. La parole est à Link, merci à lui !
Le cahier des charges
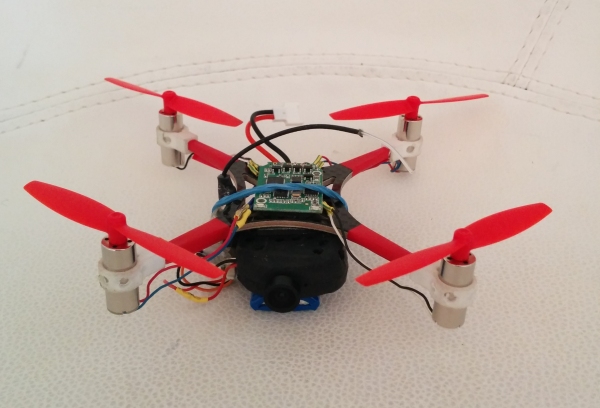
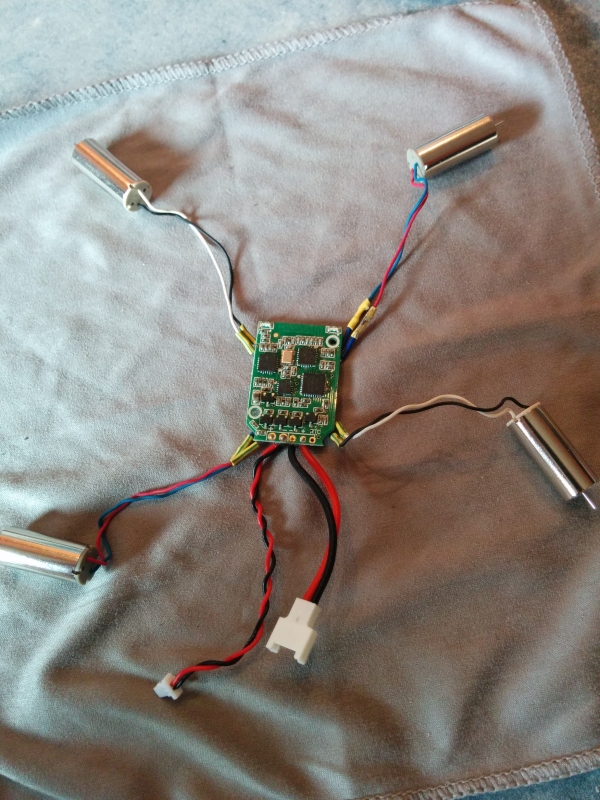
En terme de performance, je voulais obtenir au moins autant de puissance que le Hubsan X4 FPV H107D, tout en garantissant une autonomie de 6 minutes pour une envergure de 12 cm en diagonale. Enfin, le prix ne devait pas dépasser les 100 €. Mon choix s’est porté sur le contrôleur de vol du X4H107D (ou des H107L ou H107C), les moteurs 8,5 mm brushed du X4 H107D, une structure (frame) Efficiency120 en balsa et carbone, des hélices de 65 mm du Rolling Spider de Parrot. A cela s’ajoutent une caméra keychain #808#16v3 à grand angle (120°), un émetteur vidéo nano AltitudeRC de 25 mW, un connecteur mini jST 1,25 mm 2 pins et MiniUSB 5 pins mâle SMT PCB.
Les points de détails
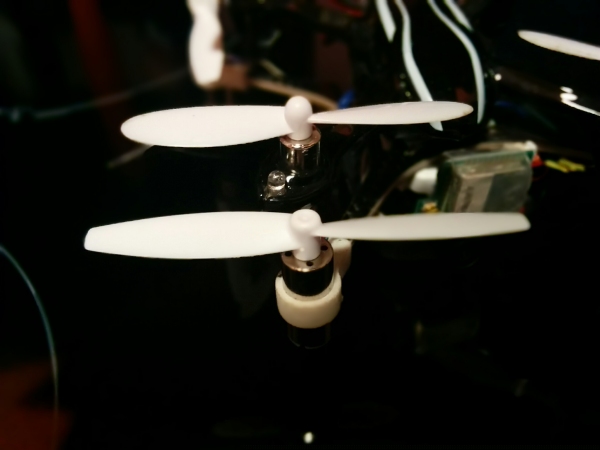
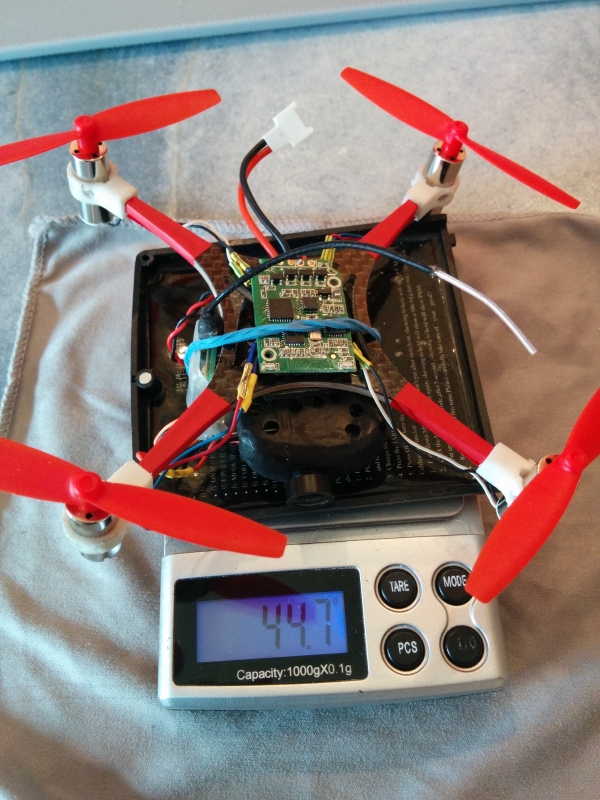
Pour conserver une réactivité et une autonomie acceptables, mes essais ont montré que le poids sans batterie devait être proche de 40 grammes pour maintenir de bonnes performances. Je me suis aperçu que l’utilisation des hélices 65 mm du Rolling Spider permettait une meilleure poussée. Mon micro-quadricoptère pèse 45 grammes : c’est donc acceptable et cela assure une poussée équivalente voir supérieure au Hubsan X4 FPV.
Le montage en images








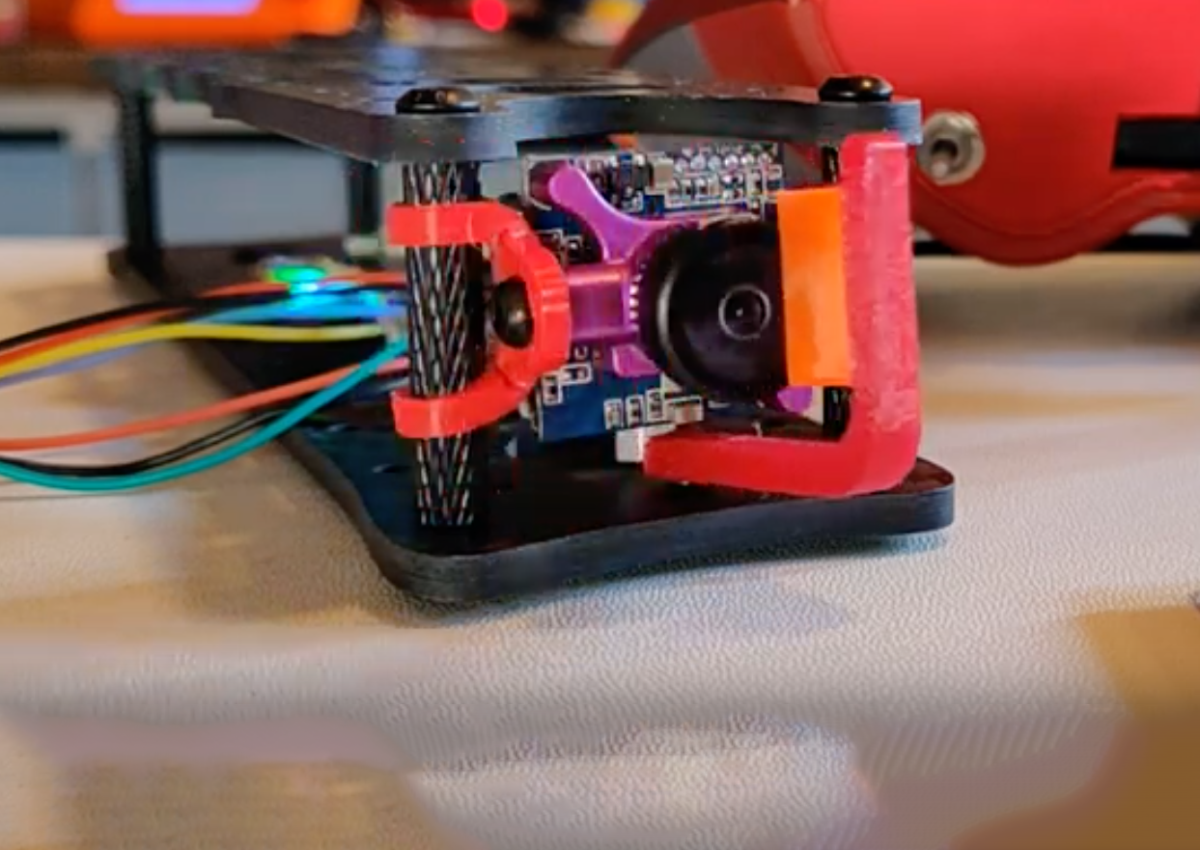
J’ aime bien cette philosophie du « Light is Right ».
Montage brut de coffrage mais ingénieux.
Pour encore « pistonner » une petite entreprise près de chez soi : http://www.ladroneshop.com/fr/catalogue/916-crazyflie-nano-quadcopter-kit-6-dof.html
vous propose une solution presque clef en main de ce qui est décrit dans cet article.
Je l’ai vu évoluer en salle avec retour écran et sur lunette FatShark / ImmersionRC c’est bluffant et plutôt sympa à voler autour du sapin à Noël !
🙂 le but est de faire un micro pour le vol fpv en parc public avec enregistrement HD 720p.
Les performances (stabilité ; puissance) un peu mieux que le hubsan fpv grâce a sa taille et aux hélices plus grandes.
Exemples de vol. Le temps n’est pas terrible 🙂
Microquad fpv fun : http://youtu.be/8Hef0f8sTlY
Practice micro fpv : http://youtu.be/TZCKhv_GI2s
J’ai eu la chance de faire voler cette incroyable config et franchement je suis ultra fan !
Sinon vous avez cette solution pour modifier votre hubsan, ladybird, blade nano qx ou Latrax pour voler à l’exterieur: vous changez les moteurs et lipos – ou vous pouvez aussi utiliser les frames et cartes de controle de Micro-moteurs – les videos n’ont besoin d’aucuns commentaires:
http://micro-motor-warehouse.com/collections/all/products/cl-0820-17
Sympatoche, cette config!! Bravo et merci à Link (et bien entendu à Fred) pour ce partage. 😉
Pour le FPV « in the house », avec un enregistrement de qualité, durant les longues soirées d’hiver…
J’en ai fait des montages ainsi avec mon escadrille d’X4s.
J’ai abandonné l’affaire car le temps de vol est ridicule, moins de 3 min. En plus, le X4C a des moteur de 8 mm et non 8,5 mm, merci de corriger l’erreur.
Franchement, chapeau link, mais montres nous une vidéo ou tu voles 6 min, merci. Aussi tu ne parles pas de la batterie que tu utilises.
http://imgur.com/sF7Xn60
http://imgur.com/pnUKpOT
Mais toujours le même soucis vol pas longtemps.
Très chouette réalisation et merci pour les liens. 😉
Le kit Kit dongle USB + Crazyflie Nano Quadcopter 6-DOF —> 140€ cela fait mal et en plus une radio, ou autres… Cela doit pas voler longtemps aussi.
Mais quelle belle réalisation aussi Suédoise. 😉
Sympa …. Tu replaces la carte FC par une alienWii (DSMX) et c’est le microquad sympa configurable à souhait.
Merci pour les compliments 🙂
A ma connaissance les moteurs du H107D et H107C sont bien des 8.5mm
Les moteurs brush les plus courant ont 3 tailles : 6mm ; 7mm et 8.5mm
Voici une étude comparant les performances des moteurs. Le concepteur des frames efficiency :
http://www.rcgroups.com/forums/showthread.php?t=2009496
Concernant l’autonomie. Elle est de 4min avec une 380mAh et autour de 6min avec une 500mAh pour des batteries neuves.
Mes lipo ont un peu pris du plomb dans l’aile avec le nombre de charge. Donc je suis plus autour de 4.5min avec une 500mAh en ce moment (plus de 50 charges).
Il n’y a rien d’extraordinaire à cela. Ce quad fait 45g comme le rolling spider. Il possède le même type de moteurs brush 8.5mm et les mêmes helices 65mm qui permettent une poussée plus importante que celle du hubsan x4.
Il faut remarquer aussi que les hélices des hubsan x4 H107L, H107D et H107C ne permettent pas d’exploiter totalement les batteries. La poussés étant insuffisante, une fois que la tension de la batterie atteint 3.8V, le micro quad ne vole plus. Mesure ta batterie en fin de vol et tu seras autour de cette valeur. Hors3.8V c’est 50/60% de courant restant !!
Grace aux hélices du rolling spider je vol jusqu‘a 3.6/3.7V. La puissance apportée par les hélices contre la perte de puissance liée à la chute de tension. On gagne donc en autonomie en plus de la portance.
Si tu es intéressé je ferai une video démo d’autonomie une fois mes nouvelles batteries réceptionnées
Il n’est pas encore dispo en europe mais je vais le prendre. En attendant je vais tester une micro multiwii MWC d’hobbyking 🙂
C’est la boutique de benedikt de RCgroup. C’est un passionné de micro très sérieux.
Il propose des moteur brush 8.5mm plus rapide que les classique de hubsan par exemple. Donc plus de poussées. Hors personnellement ces moteurs Chaoli ne m’ont durés qu’un 20ène de vol puis ont grillés.
Pour augmenter la poussée j’ai preféré simplemement augmenter la taille des hélices avec les moteurs de performances résonnables, peu cher qui ont une durée de vie très importantes (+ de 100 de vol sans en griller un!)
Il propose aussi les frame de picnis quad mais bien plus cher. Ses frames maison sont interessantes mais un peu lourdes. Enfin ses controleurs sont tres bien. En attente de la MWC et de la dispo de l’alien.
Sympa ton projet Bravo !!
http://micro-motor-warehouse.com/products/alien-fc
Autant pour moi, j’ai été induis en erreur, j’ai pris mon pied à coulisse et les moteurs sont bien du 8,5 X 20 mm. toutes mes excuses. LINK69 😉
En revanche avec ma Devo 8S modifié, j’ai la télémétrie des X4s et je descends à 3,2 V sur mes 3 models (V1, V2, C).
Sur mon Imax la même valeur et au multimètre aussi.
Maintenant cela peut aussi venir de carte différentes.
Oui je l’attends « soon to be delivrable in europe » 🙂
Du coup c’est pilotable avec la radio du x4 v2 je suppose?
Tres interessant !
Merci pour ces tests
En vol je comprends que tu descends a 3.2. Mais après le vol a combien es tu ? Avec mon hubsan fpv avec lentilles grand angle j’étais a 3.8 pour des vols corrects. Maintenant les je les vide jusqu’a 3.6 au repos en fin de vol.
Je posterai un vol sur YouTube
sebydocky, tant que tu es dans le coin : je cherche les hélices de rechange pour un u207, je sais que c’est toi qui as crée un sujet à propos de ce quadri sur rcgroups, si tu as des tuyaux je suis preneur… merci d’avance
Difficile à trouver ca …. 🙁 Les hélices du H207 sont les plus larges que je connaisse en nano. Mes spares valent de l’or :).
Sinon rabat toi sur de l’U839 chez UDI
Et dire que j’ai formé le petit scarabet « OncleFly » 🙂
Il a bien grandi maintenant 🙂 LoL…. 🙂
si je me réfère à tes photos, il y a au moins 5mm de difference entre les 2, non ?
Oui Seby tout comme Goebish et Fred and Ainonyme, mais il me reste du chemin encore à faire. 😉
Link69, donc cela coupe en fin de vole à 3,2V puis remonte à 3,4v voir 3,5v celon les accus aussi.
Mais, sinon j’ai mieux j’attends que Fred fasse un belle article. 😉
Autre option pour de meilleurs hélices meilleurs tarif :
http://www.banggood.com/Eachine-CG022-Mini-RC-Quadcopter-Spare-Parts-Blade-Set-p-941259.html
😉
et compatibles avec les châssis des hubsan x4 :-). Voici une vidéo faite avec une vieille 500mah. La vidéo a été accélérée par 4 et écrasée pour un upload rapide sur YouTube. Ici je suis a 4min40 en vol réel, non stationnaire. Des réception de mes nouvelles lipo je fais le test d’autonomie 🙂
test : http://youtu.be/YgcEAQmcXrs
Merci, mais tu vois moi les vidéos avec montage, truquage, etc, perso elle n’ont aucune valeur.
Pourtant, je suis sensible au problème de bas débit de certains. 😉
Bon ok une video de 4min40 fait plus de 600Mo en 720p. Je l’ai réduite à 30Mo en accelerant par 4 et degradant la qualité pour un upload « specialement pour toi » ce matin avant depart au boulot pour te donner une idée d’un vol.
Je n’ai rien à prouver, j’ai juste pris le temps de te répondre.
Pourquoi ? car j’aime le partage en modélisme, c’est comme cela qu’on avance.
Maintenant cet état d’esprit et suspicions de malhonnêteté ne sont pas constructif.
Encore merci Link, moi aussi je suis pour le partage en modélisme, électronique et bien d’autres.
Si on peut ce contacter par mail, cela sera plus sympas, car il y a pas beaucoup de gens qui vont nous suivre… 😉
Up ?
Bonjour Link,
merci pour les détails de ton projet. Penses tu qu’il serait possible d’utiliser du matériel de Blade ? J’ai un MSRX et j’aimerais garder les lipos et transmetteur dans un premier temps.
J’ai trouvé ça pour les moteurs :
http://www.net-loisirs.com/blade-mqx-c237_522_620_409.html
Qu’en penses tu ?
EDIT : pour les moteurs *et le reste…*
EDIT 2 :
Je viens de voir ta réponse sur le post précédent.
Que penses tu du contrôleur du lien ci dessus ?
Vu que la radio du Blade MQX est la même que celle de l’hélico MSRX.
Salut. Je contrôleur doit convenir. Pour les moteurs il te les faut sans pignons si tu veux utiliser la frame.
Je trouve la carte un peu chère.
Une alternative est d’acheter directement un hubsan x4 H107C sur banggood a 42eur.
Puis tu peux le faire évoluer en récupérant la radio la carte les moteurs les hélices et la batterie 🙂
Salut Link,
Très beau projet, ça me tente carrément.
Je pense que que tu possèdes aussi le H107D Fpv est ma question est la suivante:
J’ai le H107c HD et j’aimerai récupérer la caméra pour venir souder/remplacer le module caméra du H107d FPV (que je ne possède pas encore).
Est-ce réalisable et par la suite contrôlable avec la télécommande FPV fournie par Hubsan où aurait-il une manip’ supplémentaire à faire? (Au niveau du récepteur vidéo etc…)
Merci d’avance!
Salut
Effectivement j’ai eu le H107D. Il a un contrôleur relié à un module vtx/caméra par une fiche. Tu merderas l’émetteur vidéo si tu fais ça et retrouveras un H107C. Lors de mes premiers essais j’avais rajouté le module caméra H107C sur le H107D. Cela fonctionné car le module caméra est léger mais la caméra n’est pas top niveau couleur :
Hubsan x4 fpv H107D + H107C HD cam : http://youtu.be/NaWvTEUDZCc
Tiens LINK, j’avais oublié celui là Le V1 #16 Made in ONCLEFLY, à l’époque pas de de C et D .
http://imgur.com/9uxtaJ0
http://imgur.com/dghIMY4
De belle vidéo de 6 min. 😉
Les moteurs 8.5×20 sont ceux montés d’origine sur le hubsan ?
Ceux du H107C ou D (vidéo ou fpv)
Tu penserais quoi de le faire sur une base de Top Selling X6 ( http://www.dx.com/fr/p/x6-2-4g-4-ch-remote-control-quadcopter-w-300000-pixels-camera-light-black-green-306326 )
pour réduire les coûts ?
Super projet mini quad surtout pour un débutant comme moi ! Merci pour le partage.
Puis je avoir le retour vidéo sur la radio du h107d? Merci link.
bonjour à tous je suis nouveaux sur ce site.
je viens pratiquement de découvrir ce monde de micro drones et cela m’as pris pas mal.
depuis deux mois que j’ai acheté le x4 v2 107L (la base me semblait plus que suffisante pour l’apprentissage) et j’en suis déjà à bidouiller quelque chose comme si j’en était capable…je me retrouve avec un fer à souder à la main alors que mes connaissances en électronique sont moins que basiques. mais j’aime bien.
le but sera d’arriver à quelque chose comme ce très jolie montage de link (merci pour le partage) enfin, pour l’instant je suis loin du fpv 😉
je viens juste de souder la 808 sur la carte mere de l’hubsan (avec un plug pour le coté pratique)afin de retirer le poid de sa batterie de mon calcule de grammes (la seule optimisation pour l’instant, le case de la camera est intacte et en plus je vol avec les protections).
duré de vol assez limité, peut etre 3min (avec des moteurs coreless 7mm très très energivores comparé aux ces d’origines) mais surtout la video enregistré est endomagé et présentes des rayures horizontales. je me pose donc des questions sur les deux pôles que j’ai recuperé sur la carte mere de l’hubsan. sur la video on voit bien que les bandes n’apparessent que lorsque le quad commence à leviter, comme si en poussant le gas la camera n’avait plus un debit costant en alimentation (je suis amateur je le rappel!). ou alors c’est une sorte d’ interference?
quelqu’un a deja experimenté ça?
beaucoup des questions et j’avoue je ne sais même pas si c’est le bon endroit pour les poster…dans ce cas j’en suis desolé.
merci à vous tous pour vos partage en tous cas, ça donne des envies.
m
Massimo, pour supprimer les parasites il te suffit de prendre le jus depuis la batterie directement et non depuis le pcb du X4. @+
Ben
bonjour benbenco
effectivement cela pourrait être une solution. meme la seule qui me reste, bien que je ne sais pas trop comment m’y prendre pour la manip. je vais chercher…
en fait je viens tout juste de souder un pololu entre alimentation de la camera et x4(commandé suite au conseil de onclefly, merci ;)) par contre, mauvaise manip pendant le réglage du voltage en sortie et petite fumé de la carte du x4 (je ne sais pas du tout ce que j’ai touché) j’ai cru le pire pour le quad, mais il réponds toujours aux commandes, seulement je n’ai plus de courant qui passe sur la prise auxiliaire (merde!).
à moins que ce soit possible de se brancher directement sur les deux pôles principaux de la carte c’est effectivement la seule solution qui me reste. je suis preneur si tu as des informations sur comment doubler la sortie d’une batterie 😉
merci beaucoup.
J’avais les même parasites avant de faire ça :
http://imgur.com/vw7H65L
J’ai dessoudé le connecteur de la batterie de la 808 pour le souder sur une batterie du X4. J’ai rallonger un peu les fils du connecteur de la 808 car c’était un peu juste pour le positionnement de la 808.
et voilà : http://imgur.com/TiKH3uV
@+
hello,
merci pour ces précieuses infos, j’arrive un peu après la bataille mais cette petite cam va parfaitement convenir à mes besoins!
Bonjour,
Serait il possible d’avoir un schéma du montage, le câblage pour réunir la 808#16 avec la batterie et le l’émetteur, s’il vous plait ?
Existe t’il une version « lowcost » du « AltitudeRC – Nano 5.8G FPV Transmitter », pas loin de 50€ c’est pas donné.
Merci beaucoup.
J’ai trouver une petite vidéo avec un drone un peu comme toi vachement sympa pour la taille franchement : https://www.youtube.com/watch?v=tnxFlYj4UIg