Immersion sur mini multicoptères épisode 5 : l’optimisation

Nous avons vu les bases, le matériel, l’installation, les réglages pour voler en immersion avec un petit appareil volant. Maintenant, il est question d’optimiser un peu tout cela. Le poids de la caméra, sa prise et sa batterie constituent un handicap pour votre multicoptère. Il y a moyen d’améliorer les choses, mais ce sont des modifications qui requièrent des talents de bricoleur.
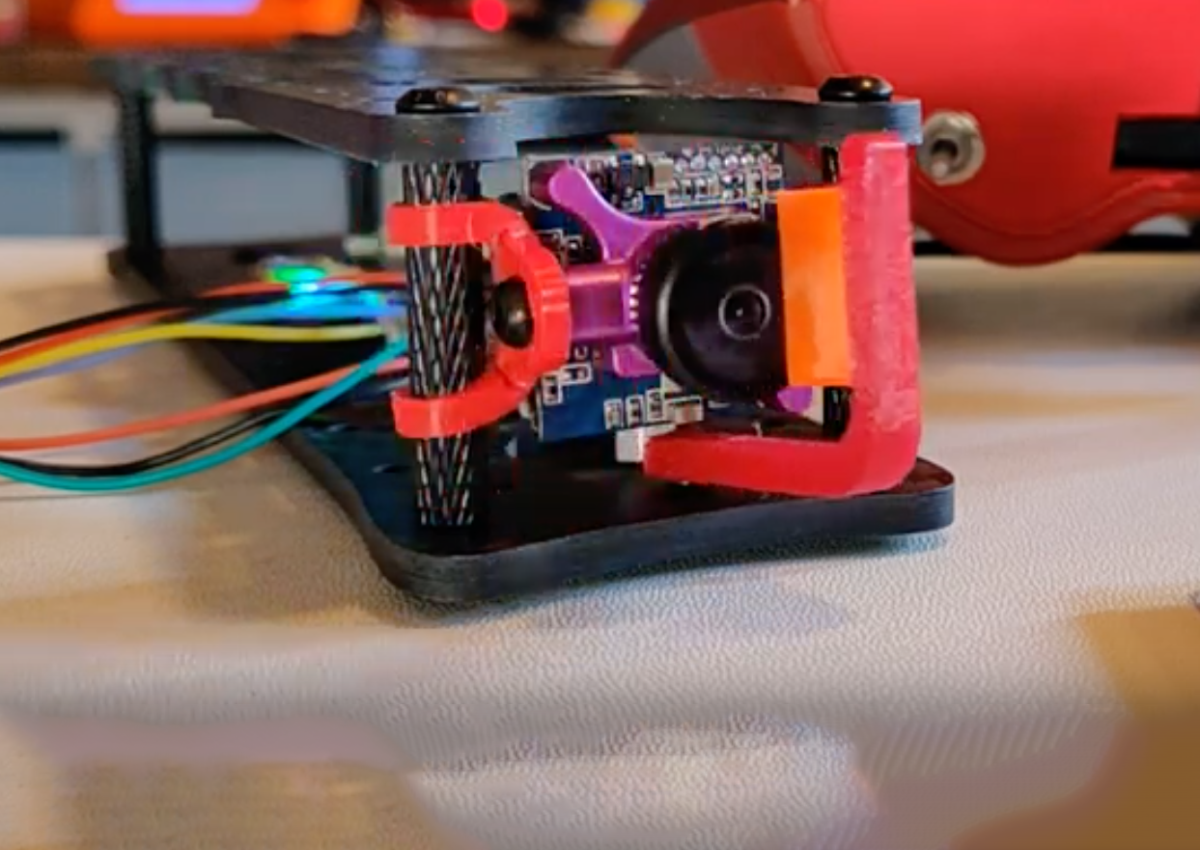
Soudures ?
Au lieu de brancher une batterie, par exemple, vous pouvez tenter d’utiliser le connecteur d’alimentation des Ladybird, Spacewalker ou Scorpion. Il suffit pour cela d’utiliser la prise « bind » fournie avec les appareils, en y branchant les câbles – attention aux polarités. Mais nous ne vous conseillons pas cette bidouille : d’une part elle diminue considérablement l’autonomie de l’appareil (moins de 3 minutes pour un Spacewalker), d’autre part elle génère de forts parasites lorsque vous poussez les gaz à fond. Mieux vaut tenter de gagner quelques grammes en vous débarrassant du double connecteur de la caméra.  Pas question de les couper et de souder directement le câble de la batterie, les voltages ne sont pas compatibles. Dans le connecteur de la caméra se trouve en effet un circuit qui s’occupe de transformer du 3,7V en 5V. Si vous voulez supprimer ce connecteur (et gagner une bonne dizaine de grammes !), il faut impérativement utiliser un circuit équivalent, ou revoir les soudures de la caméra comme indiqué ici. Attention, ce montage n’est pas à la portée du tout-venant, vous êtes prévenu !
Pas question de les couper et de souder directement le câble de la batterie, les voltages ne sont pas compatibles. Dans le connecteur de la caméra se trouve en effet un circuit qui s’occupe de transformer du 3,7V en 5V. Si vous voulez supprimer ce connecteur (et gagner une bonne dizaine de grammes !), il faut impérativement utiliser un circuit équivalent, ou revoir les soudures de la caméra comme indiqué ici. Attention, ce montage n’est pas à la portée du tout-venant, vous êtes prévenu !
Antennes ?
Le récepteur fourni avec la caméra devrait en théorie assurer une meilleure réception que le boîtier enregistreur. Et pourtant, les résultats de nos essais ne sont pas concluants : la distance de fonctionnement n’est pas meilleure avec ce récepteur. Une autre solution consiste à remplacer les antennes d’origine par d’autres plus efficaces, comme les PinWheel de Terry, vendues sur FPV4ever (ici), pour moins de 35 € l’unité. Le gain, d’après les essais de courageux bricoleurs, est sensible puisque la portée passe à 25 mètres sans parasite.  Mais il faut s’y connaître pour remplacer l’antenne-brin de la caméra (en la dessoudant) et celle du module de réception (attention aux polarités) : nous n’avons pas les compétences requises pour nous y essayer…
Mais il faut s’y connaître pour remplacer l’antenne-brin de la caméra (en la dessoudant) et celle du module de réception (attention aux polarités) : nous n’avons pas les compétences requises pour nous y essayer…
Récepteur dans les lunettes ?
Pour améliorer la réception, autant placer le récepteur à un endroit en hauteur et avec une vue dégagée : sur votre tête ! Les lunettes Fat Shark sont prévues pour accueillir un récepteur, sur lequel il est, de plus, facile de placer une antenne performante de type PinWheel.
Sensibilité du multicoptère ?
Le vol en immersion s’accommode très mal des commandes trop brusques, dont le résultat est constaté avec un retard dû au temps de latence de la transmission vidéo. Le résultat est souvent un crash. Pour éviter les embardées, vous pouvez paramétrer votre radio – si elle est prévue pour cela – pour assouplir les commandes. Les vols seront plus doux, plus lents, et finalement plus agréables.
En résumé ?
 Les multicoptères de petite taille apparus au début de l’année 2012 ouvrent la porte au vol en immersion à risque quasi nul : un Spacewalker de Walkera est peu dangereux s’il se crashe, beaucoup moins en tous cas qu’un multicoptère de grande taille. Le faible poids que peuvent embarquer ces appareils limite la puissance des caméras et des émetteurs, ce qui réduit l’intérêt de la pratique. Pour l’instant, équiper un mini quadricoptère en vol en immersion se révèle coûteux, pour un résultat à peine satisfaisant. Mais le plaisir de voler sans risque est intense, même si la qualité de la vidéo et la durée de vol se révèlent toutes deux frustrantes…
Les multicoptères de petite taille apparus au début de l’année 2012 ouvrent la porte au vol en immersion à risque quasi nul : un Spacewalker de Walkera est peu dangereux s’il se crashe, beaucoup moins en tous cas qu’un multicoptère de grande taille. Le faible poids que peuvent embarquer ces appareils limite la puissance des caméras et des émetteurs, ce qui réduit l’intérêt de la pratique. Pour l’instant, équiper un mini quadricoptère en vol en immersion se révèle coûteux, pour un résultat à peine satisfaisant. Mais le plaisir de voler sans risque est intense, même si la qualité de la vidéo et la durée de vol se révèlent toutes deux frustrantes…
La série Immersion sur un mini multicoptère est terminée. La suite ? Ce sera la version pour des appareils un peu plus volumineux et puissants. Mais à taille très raisonnable pour un pilote débutant !
Quand l’image est perturbée par des parasites…
Voilà ce qu’on voit dans les lunettes. La perte du signal vidéo, ne serait-ce qu’une seconde, est catastrophique en vol…





Le Ladybird de Walkera en FPV et immersion
Voler en immersion avec le quadricoptère Ladybird et les composants que nous avons décrits est possible, mais difficile. En effet, le poids de la caméra, ses connecteurs et sa batterie sont trop importants pour que l’appareil tienne correctement en vol. Voici le résultat en vidéo : ce sont des sauts de puce…
http://youtu.be/HLdKCOIdPxI
Passez en plein écran pour mieux profiter de la vidéo.

Vu ailleurs un Ladybird en FPV avec des prouesses impressionnantes :
http://fpvlab.com/forums/showthread.php?8208-FPV-Walkera-Ladybird-QR
Moi j’en suis à passer lentement sous le portique dans le jardin, rien de folichon ;o)
Effectivement !! Ils savent manier de le fer à souder, en tous cas. Les vols de nuit, c’est impressionnant aussi…
Le portique du jardin, c’est très bien aussi 😉
Testé hier soir une toute petite ferrite sur l’alimentation de la vidéo, ça résout les problèmes de parasites ! Ce qui permet de voler sur un seul accu et de grappiller quelques précieux grammes… vivement que la météo me permette un petit essai dehors