Université de Zürich : rester en vol avec 3 moteurs sur 4
 Ce ne sont pas les premiers travaux sur le sujet, je vous avais parlé des travaux de Flying Machine de l’école polytechnique ETH Zürich (voir ici), c’était en… 2013 ! En août dernier, une vidéo montrait un Matrice 300 RTK se rétablir après la perte d’un moteur. Cette fois-ci, c’est l’Université de Zürich (UZH) qui se distingue avec les travaux d’une équipe de scientifiques spécialisée en robotique, sous la direction du professeur Davide Scaramuzza. Elle a publié un article dans l’IEEE Xplore intitulé « un vol autonome de quadricoptère malgré une panne de moteur, avec des capteurs visuels à bord : images vs événementiels ».
Ce ne sont pas les premiers travaux sur le sujet, je vous avais parlé des travaux de Flying Machine de l’école polytechnique ETH Zürich (voir ici), c’était en… 2013 ! En août dernier, une vidéo montrait un Matrice 300 RTK se rétablir après la perte d’un moteur. Cette fois-ci, c’est l’Université de Zürich (UZH) qui se distingue avec les travaux d’une équipe de scientifiques spécialisée en robotique, sous la direction du professeur Davide Scaramuzza. Elle a publié un article dans l’IEEE Xplore intitulé « un vol autonome de quadricoptère malgré une panne de moteur, avec des capteurs visuels à bord : images vs événementiels ».
Le principe ?
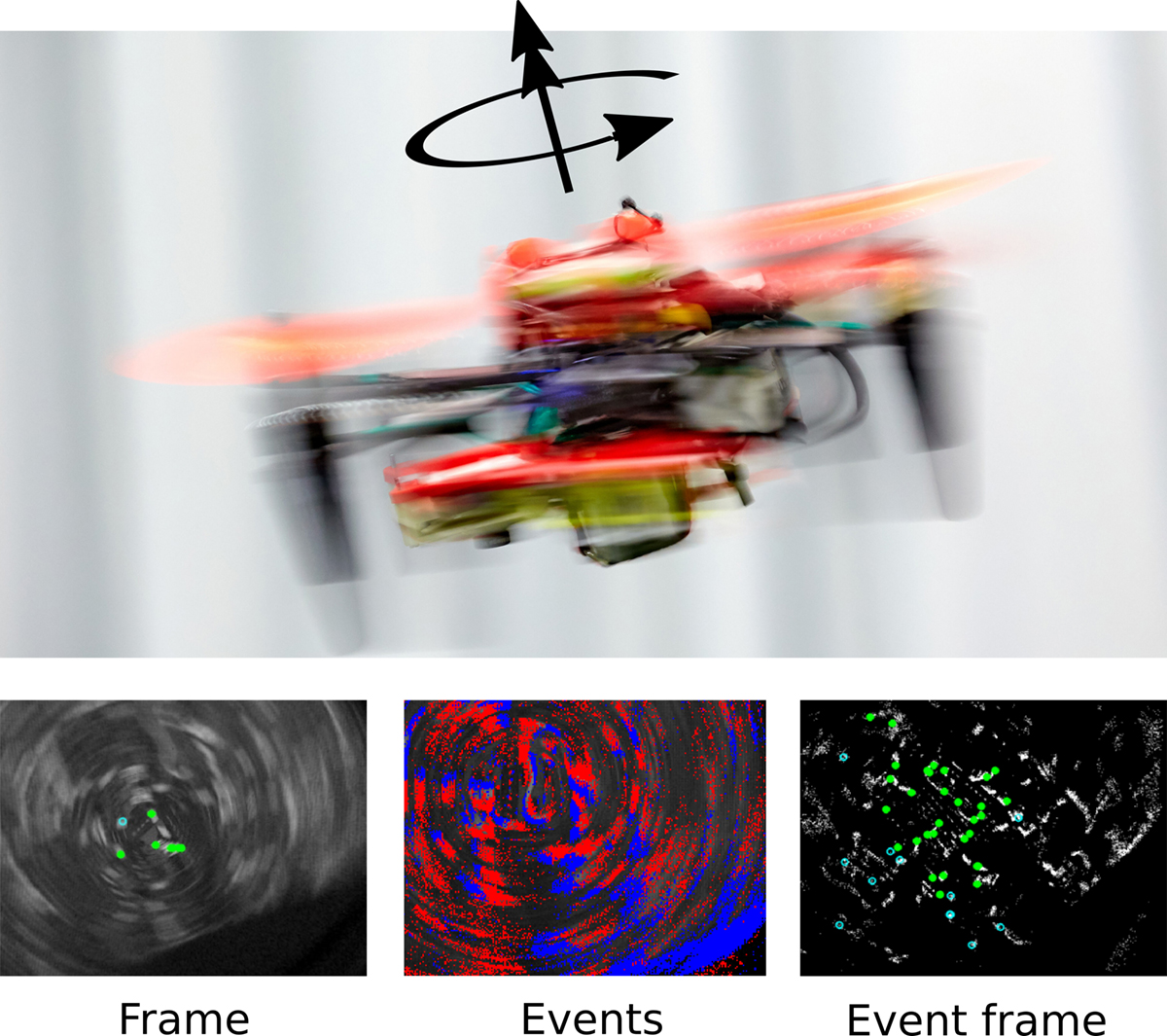 L’idée est d’éviter un crash lors de la perte d’un moteur sur un drone à 4 hélices. Un incident qui peut survenir en cas de rupture d’une hélice en vol, de touchette avec un oiseau ou un obstacle, de panne d’ESC ou de moteur. Le challenge des chercheurs de l’université l’UZH Zürich ? Parvenir à rétablir un vol suffisamment stable pour reprendre le contrôle de l’appareil, éviter le crash et ses effets collatéraux au sol, en s’appuyant sur des capteurs vidéo à bord. Lorsqu’un moteur est perdu, un quadricoptère se lance dans une rotation rapide. Trop rapide pour les capteurs vidéo classiques, surtout si la luminosité est faible : ils ne voient que des successions d’images floues.
L’idée est d’éviter un crash lors de la perte d’un moteur sur un drone à 4 hélices. Un incident qui peut survenir en cas de rupture d’une hélice en vol, de touchette avec un oiseau ou un obstacle, de panne d’ESC ou de moteur. Le challenge des chercheurs de l’université l’UZH Zürich ? Parvenir à rétablir un vol suffisamment stable pour reprendre le contrôle de l’appareil, éviter le crash et ses effets collatéraux au sol, en s’appuyant sur des capteurs vidéo à bord. Lorsqu’un moteur est perdu, un quadricoptère se lance dans une rotation rapide. Trop rapide pour les capteurs vidéo classiques, surtout si la luminosité est faible : ils ne voient que des successions d’images floues.
La solution ?
Plutôt qu’une caméra classique « à images », les chercheurs se sont tournés vers les caméras neuromorphiques, dites aussi caméras événementielles. Le capteur ne mémorise pas des images, mais des informations de variation de luminosité, uniquement quand il s’en produit. Le principe réduit la quantité de données à traiter et améliore leur pertinence puisque seuls les changements sont indiqués. Il permet aussi une plus grande sensibilité pour un meilleur fonctionnement en faible luminosité. 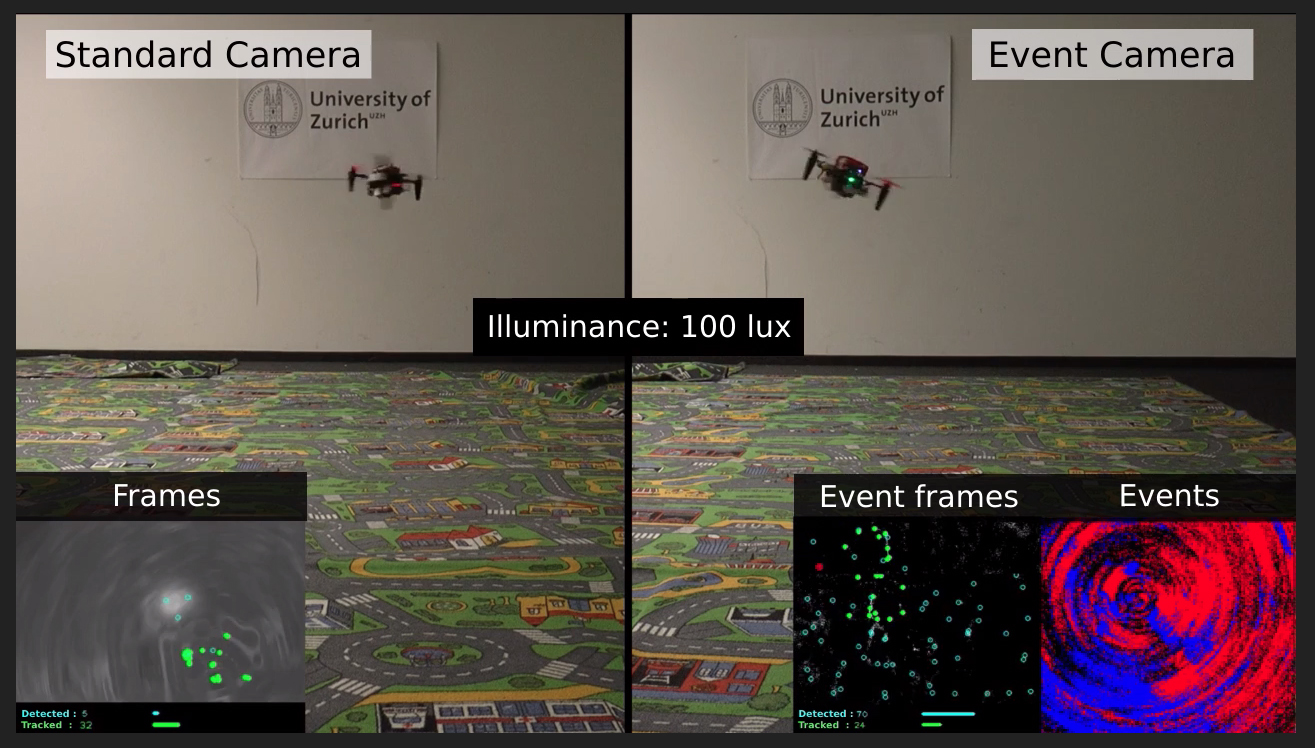 Dernier atout majeur : ces caméras sont rapides puisqu’elles ne reposent plus sur un taux de rafraichissement. L’inconvénient ? Les caméras neuromorphiques sont chères.
Dernier atout majeur : ces caméras sont rapides puisqu’elles ne reposent plus sur un taux de rafraichissement. L’inconvénient ? Les caméras neuromorphiques sont chères.
Le résultat ?
Les algorithmes de détection de la position dans l’espace a permis aux chercheurs de stabiliser le vol d’un quadricoptère avec un moteur arrêté, de manière suffisamment probante pour valider les travaux de l’équipe. Laquelle prévoit de rendre les outils disponibles pour tous en Open Source…
Source : IEEE Explore

Hello,
Il y a surement une raison que ma raison ignore… mais pourquoi ne pas « pouvoir » programmer le contrôleur de vol à réagir différemment quand manifestement il essaie sans succès de rétablir l’appareil alors qu’un moteur est défectueux?
De part les mouvements générés par la tentative de rétablissement, il devrait pouvoir détecter quel moteur est HS et agir en conséquence…
Qqn a une idée?
Merci pour le sujet…
C’est un peu vieux comme méthode ça. Ils ont repris un concept déjà existant..
Et depuis, ça n’a toujours pas été utilisé en pratique donc c’est que ça ne doit pas séduire des masses..
@Indy, ça existe dans certains contrôleur de vol, sans télémétrie des moteurs c’est une tache difficile. Avec la télémétrie moteurs c’est plus simple, mais il reste le problème de quoi faire. Dans le cas, d’un quadrimoteur qui passe à 3 moteurs, arrive à une situation instable en terme de contrôle. Le choix le plus simple et surement le plus sur est de laisser tomber le contrôle du Yaw au profit de l’attitude. Avec des moteurs à orientation on inclinaison variables, hélices à pas variables, on peut mettre en place d’autre stratégie, mais ça a forcement un coup matériel et en durée de vis du matériels qui va être plus sollicité du fait d’un composant en panne.