Diatone Roma F4 LR HD, le test
 Parce que la mode des micro racers 4 pouces bat son plein, et que j’adore ce format, j’ai ajouté le Roma F4 LR HD à ma collection qui compte déjà le Flywoo Explorer LR HD 4p et le iFlight Chimera 4S LR. Il arbore un look très semblable aux deux autres, particulièrement le Flywoo, puisqu’il adopte lui-aussi une disposition de bras en « deadcat ». Comme ses concurrents équipés d’un retour vidéo en HD, le Diatone repose sur un boitier Vista du constructeur Caddx pour assurer la compatibilité avec le système FPV numérique de DJI. Que vaut-il vraiment ? Réponse dans cette chronique.
Parce que la mode des micro racers 4 pouces bat son plein, et que j’adore ce format, j’ai ajouté le Roma F4 LR HD à ma collection qui compte déjà le Flywoo Explorer LR HD 4p et le iFlight Chimera 4S LR. Il arbore un look très semblable aux deux autres, particulièrement le Flywoo, puisqu’il adopte lui-aussi une disposition de bras en « deadcat ». Comme ses concurrents équipés d’un retour vidéo en HD, le Diatone repose sur un boitier Vista du constructeur Caddx pour assurer la compatibilité avec le système FPV numérique de DJI. Que vaut-il vraiment ? Réponse dans cette chronique.
La vidéo
Tour du propriétaire
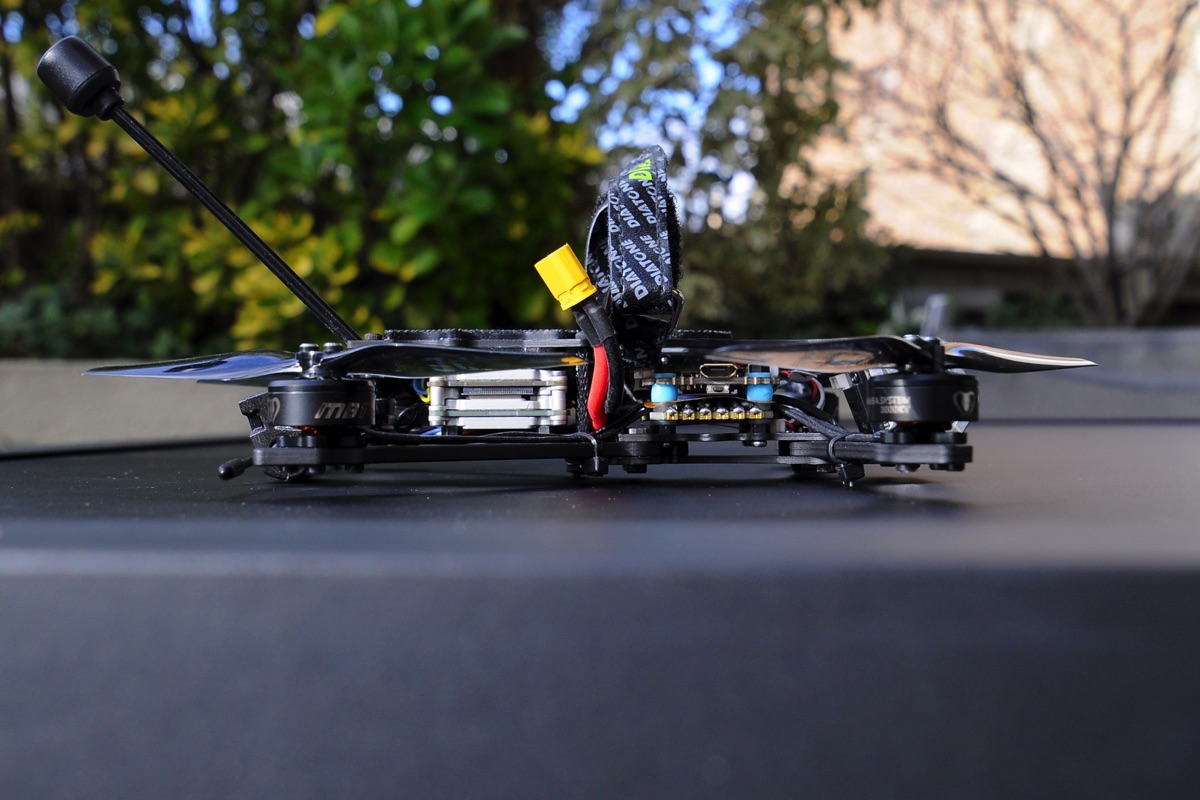
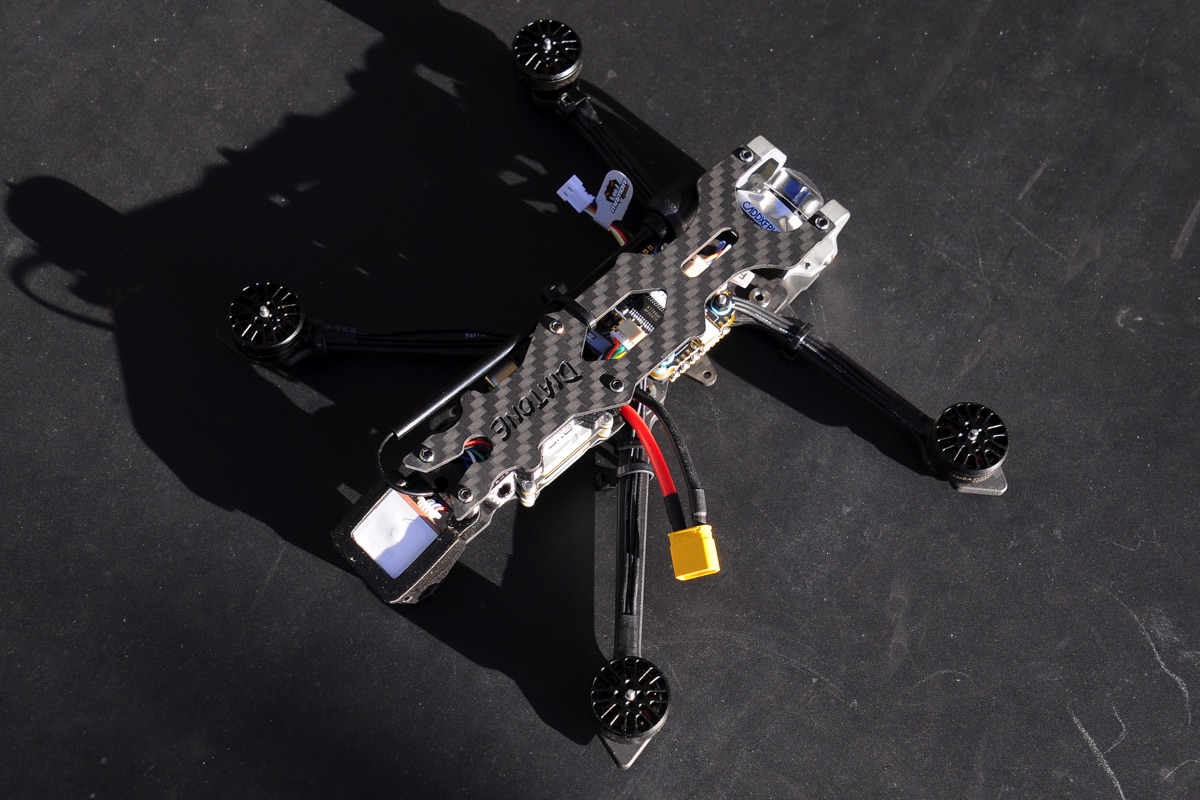
 Le Roma F4 LR HD mesure 17,5 cm de diagonale de moteur à moteur. Il repose sur une plaque inférieure en carbone très fine de 1,5 mm, renforcée par une seconde plaque plus petite à l’avant, de même épaisseur. Les deux enserrent les bras moteurs en carbone, épais de 3 mm. La plaque supérieure mesure 1,5 mm d’épaisseur. A l’avant, la caméra est maintenue par deux pièces en aluminium. Sur les deux entretoises arrière sont fixées deux pièces en TPU, l’une pour maintenir l’antenne vidéo, l’autre pour le GPS, un BN-180, et une antenne type Immortal T de TBS. Diatone fournit un tapis antidérapant à coller sur la partie arrière de la structure carbone : c’est que sera placée la batterie. Les moteurs sont des brushless Mamba 1404 à 3000KV, avec des hélices HQProp T4x2.5.
Le Roma F4 LR HD mesure 17,5 cm de diagonale de moteur à moteur. Il repose sur une plaque inférieure en carbone très fine de 1,5 mm, renforcée par une seconde plaque plus petite à l’avant, de même épaisseur. Les deux enserrent les bras moteurs en carbone, épais de 3 mm. La plaque supérieure mesure 1,5 mm d’épaisseur. A l’avant, la caméra est maintenue par deux pièces en aluminium. Sur les deux entretoises arrière sont fixées deux pièces en TPU, l’une pour maintenir l’antenne vidéo, l’autre pour le GPS, un BN-180, et une antenne type Immortal T de TBS. Diatone fournit un tapis antidérapant à coller sur la partie arrière de la structure carbone : c’est que sera placée la batterie. Les moteurs sont des brushless Mamba 1404 à 3000KV, avec des hélices HQProp T4x2.5.
L’électronique de bord
 Le contrôleur de vol est un Mamba F405 DJI de Diatone, basé sur un processeur F4, flashé avec Betaflight, avec une Blackbox de 16 Mo, associé à un ESC 4 en1 juste en-dessous, un modèle de 30A. Juste derrière se trouve le boitier Vista pour la réception des ordres radio et le retour vidéo numérique. Le Mamba F405 DJI, comme son nom l’indique, est prévu pour fonctionner avec le système de DJI : il est équipé de connecteurs pour une liaison « propre » reposant sur des nappes. La caméra, une Nebula Micro de Caddx, est reliée au boitier Vista. Tous les fils sont cachés et regroupés à l’intérieur de la structure. A noter tout de même que les fils sous la caméra sont exposés : la structure est évidée à cet endroit. Le risque ? C’est évidemment de les arracher lors d’un crash… ou même d’un atterrissage réussi !
Le contrôleur de vol est un Mamba F405 DJI de Diatone, basé sur un processeur F4, flashé avec Betaflight, avec une Blackbox de 16 Mo, associé à un ESC 4 en1 juste en-dessous, un modèle de 30A. Juste derrière se trouve le boitier Vista pour la réception des ordres radio et le retour vidéo numérique. Le Mamba F405 DJI, comme son nom l’indique, est prévu pour fonctionner avec le système de DJI : il est équipé de connecteurs pour une liaison « propre » reposant sur des nappes. La caméra, une Nebula Micro de Caddx, est reliée au boitier Vista. Tous les fils sont cachés et regroupés à l’intérieur de la structure. A noter tout de même que les fils sous la caméra sont exposés : la structure est évidée à cet endroit. Le risque ? C’est évidemment de les arracher lors d’un crash… ou même d’un atterrissage réussi !
Les autres composants ?
 A l’arrière de l’appareil, Diatone a placé un récepteur GPS incliné pour qu’il se trouve à l’horizontale pendant le vol, pour optimiser la réception. L’antenne vidéo est une polarisée LHCP avec une base longue de 8,5 cm, pour une longueur totale de 10,5 cm. Elle est à insérer dans la pièce en TPU à l’arrière, et peut en être extraite facilement pour le transport. Il n’y a pas de buzzer à bord, ni de LED. Mais Diatone fournit un buzzer dans la boite, à souder soi-même si on en éprouve le besoin. Dommage, il aurait mérité d’être préinstallé, préréglé et aurait profité d’une pièce en TPU pour être fixé. Là, c’est à vous de vous débrouiller.
A l’arrière de l’appareil, Diatone a placé un récepteur GPS incliné pour qu’il se trouve à l’horizontale pendant le vol, pour optimiser la réception. L’antenne vidéo est une polarisée LHCP avec une base longue de 8,5 cm, pour une longueur totale de 10,5 cm. Elle est à insérer dans la pièce en TPU à l’arrière, et peut en être extraite facilement pour le transport. Il n’y a pas de buzzer à bord, ni de LED. Mais Diatone fournit un buzzer dans la boite, à souder soi-même si on en éprouve le besoin. Dommage, il aurait mérité d’être préinstallé, préréglé et aurait profité d’une pièce en TPU pour être fixé. Là, c’est à vous de vous débrouiller.
Montage d’un récepteur
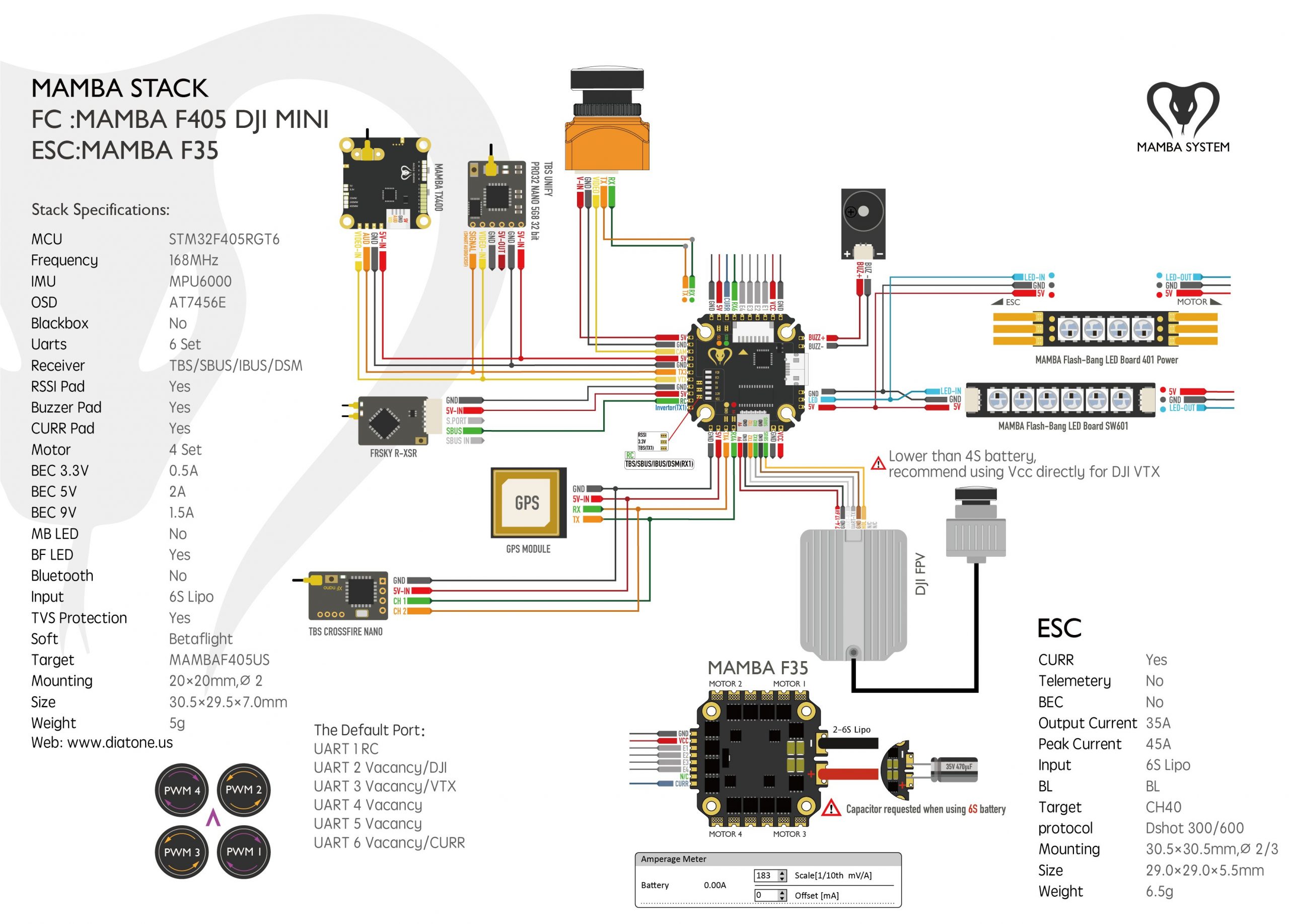 Puisque je n’ai pas la radiocommande de DJI, j’ai choisi d’installer un récepteur Crossfire Nano RX de TBS. Les soudures à réaliser sont petites et donc un peu délicates, mais j’ai réussi à surmonter l’épreuve – et si j’ai réussi, tout le monde peut le faire. Il y a la place pour insérer le Crossfire Nano RX juste au-dessus du boitier Vista. Mais par crainte du dégagement de chaleur, j’ai préféré le placer au-dessus du contrôleur de vol. Le schéma du contrôleur de vol est très explicite : il montre les principales combinaisons de récepteurs possibles, dont ceux de TBS et FrSky. Le GPS étant placé sur l’UART 5, j’ai choisi d’utiliser l’UART 4 pour le Crossfire Nano RX. Le boitier de DJI occupe l’UART 2, il reste donc les UART 1, 3 et 6 pour d’autres accessoires. Le schéma indique également où souder les deux fils du buzzer. Prêt à voler, avec un récepteur Crossfire Nano RX, mais sans batterie, le Roma F4 LR HD s’affiche à 166 grammes sur la balance. Notez que l’appareil est prêt pour recevoir un récepteur R-XSR de FrSky, avec une prise déjà soudée. La pièce en TPU à l’arrière permet de placer ses deux antennes en V.
Puisque je n’ai pas la radiocommande de DJI, j’ai choisi d’installer un récepteur Crossfire Nano RX de TBS. Les soudures à réaliser sont petites et donc un peu délicates, mais j’ai réussi à surmonter l’épreuve – et si j’ai réussi, tout le monde peut le faire. Il y a la place pour insérer le Crossfire Nano RX juste au-dessus du boitier Vista. Mais par crainte du dégagement de chaleur, j’ai préféré le placer au-dessus du contrôleur de vol. Le schéma du contrôleur de vol est très explicite : il montre les principales combinaisons de récepteurs possibles, dont ceux de TBS et FrSky. Le GPS étant placé sur l’UART 5, j’ai choisi d’utiliser l’UART 4 pour le Crossfire Nano RX. Le boitier de DJI occupe l’UART 2, il reste donc les UART 1, 3 et 6 pour d’autres accessoires. Le schéma indique également où souder les deux fils du buzzer. Prêt à voler, avec un récepteur Crossfire Nano RX, mais sans batterie, le Roma F4 LR HD s’affiche à 166 grammes sur la balance. Notez que l’appareil est prêt pour recevoir un récepteur R-XSR de FrSky, avec une prise déjà soudée. La pièce en TPU à l’arrière permet de placer ses deux antennes en V.
Réglages
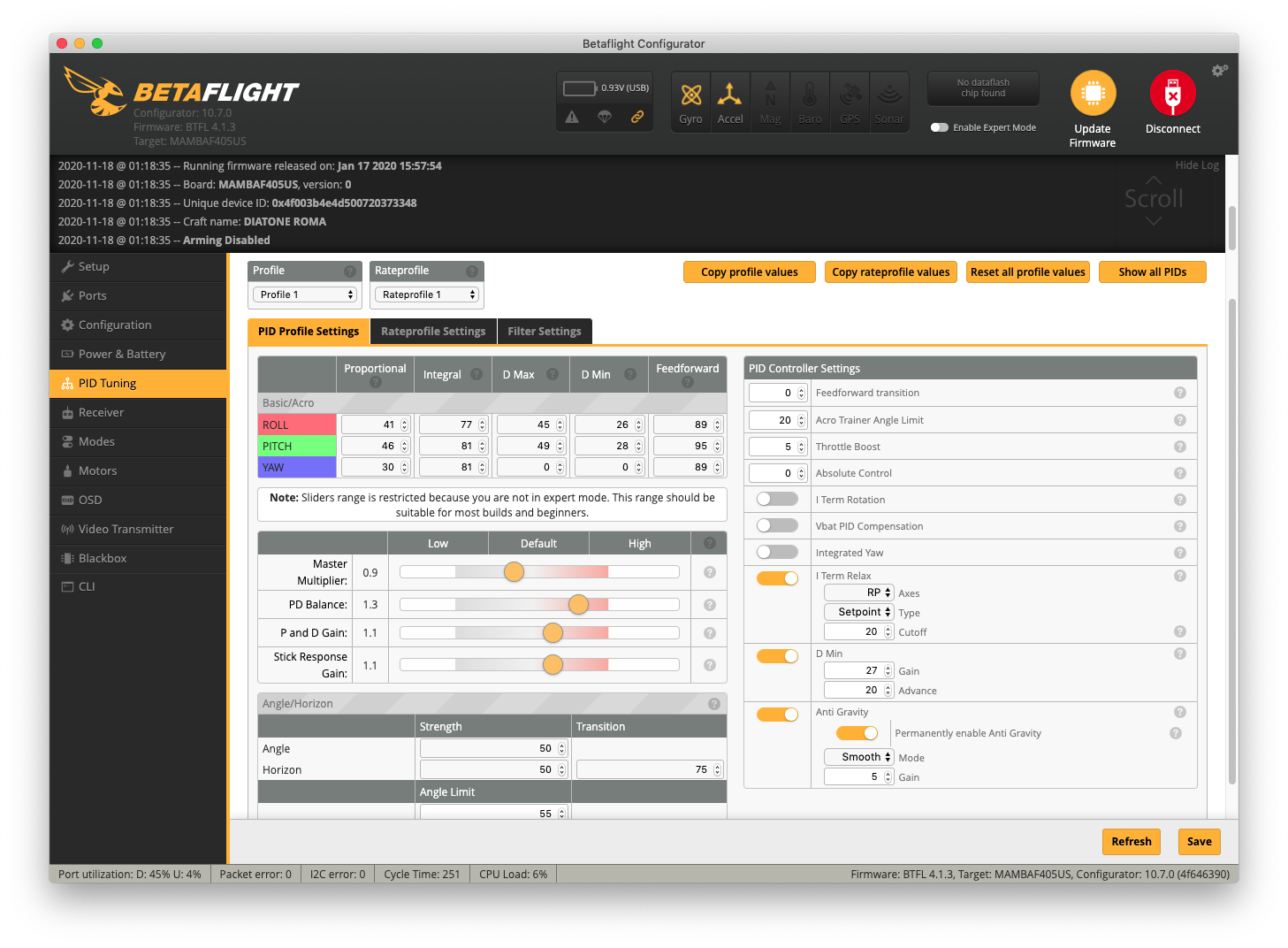 Le connecteur USB-C du boitier Vista est facile d’accès : le branchement avec DJI Assistant FPV V2 sur PC Windows ou Mac est rapide. Et nécessaire, pour activer le système et installer la dernière mise à jour. Le connecteur microSD du contrôleur de vol est également très facile d’accès. Il permet de passer en revue les paramètres de Betaflight, présent en version 4.1.3. et de constater que Diatone a réalisé une bonne partie des réglages… mais pas tous ! Les PID, le nom de l’appareil, l’armement à 180°, l’OSD sont préréglés. Il faut finaliser les méthodes d’armement, de choix des modes, du Flip Over After Crash…
Le connecteur USB-C du boitier Vista est facile d’accès : le branchement avec DJI Assistant FPV V2 sur PC Windows ou Mac est rapide. Et nécessaire, pour activer le système et installer la dernière mise à jour. Le connecteur microSD du contrôleur de vol est également très facile d’accès. Il permet de passer en revue les paramètres de Betaflight, présent en version 4.1.3. et de constater que Diatone a réalisé une bonne partie des réglages… mais pas tous ! Les PID, le nom de l’appareil, l’armement à 180°, l’OSD sont préréglés. Il faut finaliser les méthodes d’armement, de choix des modes, du Flip Over After Crash…


Il est regrettable qu’en France on ne puisse pas exploiter les performances d’une telle machine à cause d’une législation de plus en plus contraignante pour ne pas dire carrément absurde. Cela fait perdre tout intérêt pour ce type de machine ?
Alors bien sûr il y a l’étranger (pour se donner bonne conscience) ou le vivre caché pour survivre dans la clandestinité ? .
A quand la machine qui pourra voler trois heures et à plus de 20km ? ?
@fred a dit : « Parce que la mode des micro racers 4 pouces bat son plein, et que j’adore ce format… » je te rejoins à 100% !
Ca fait maintenant quelques mois que j’étudie l’affaire pour en disposer d’un au printemps prochain. C’est vraiment pas évident avec l’offre qui a pu se développer ( pour notre plus grand plaisr !) autour de ces 4″LR. Il sera tres certainement un DIY (ou en partie) parce que tous on des solutions interessantes mais aucun ne corespond à mes souhaits..
Ce diatone Roma LR4″ ne fait pas exception. J’aime bcp ça frame, mais pas satisfait du choix moteur, gps,…
Et ces vibrations que tu cites, ne m’encourage pas vraiment…
Mon choix reste assurément sur la frame qui à lancé cet engouement : Le Flywoo, ainsi que celle de Tomoquads, la Katana 2 😉
Merci pour ce test toujours aussi sérieux et objectif.
Bon vol en 4 pouces LR !
@ CriTof, le top serait l’Explorer de FlyWoo avec l’électronique et le GPS de iFlight auquel on rajoute un petit blindage des câbles. Ce châssis de FlyWoo est un vrai petit bijou! Il me tarde de l’essayer…
Rx
Je suis étonné par la faible autonomie… 14mn en li-ion 3000mah, j’ai 2 fois plus avec un Geprc baby croc (28mn). 3mn seulement en 650mah (vil agressif) je dois tenir 7 ou 8mn de mon côté. C’est pas exactement le même (moteurs 1404 2750kv) mais la différence est majeure pour un appareil de même famille.
@ Cyril : Je n’ai pas le GePRC, mais aucun des autres modèles que j’ai (iFlight et Flywoo) ne tient 28 min… Il va donc falloir que je m’attaque au Baby Croc 🙂
Avec des tattu 850 je tiens largement 11-12 minutes en vol semi pépère sur le baby croc :). Mais a priori le flywoo fait aussi bien :).
@ Fred : je dis pas que le baby croc vole plus longtemps (à mon avis c’est kif kif), mais j’ai l’impression que tes batteries sont pas en forme ?. Après pour tenir 28mn en li-ion il faut la pousser loin…
@ Cyril TINTORI : Ben pourtant j’utilise toujours des Lipos neuves pour les tests d’autonomie (mixées avec d’autres qui ont des cycles dans le nez). Tu descends à combien sur les Li-ion ?
Bon… Pas encore merci @Fred… Hi, hi !
J’attendrai pas le printemps prochain, j’ai craqué pour l’original LR4 Flywoo, mais en DIY à ma sauce !
Vais continuer en attendant, ma production de 3 et 4S en Li-Ion 😉
@Fred, je cherchais justement ces infos pour savoir quelle était la limite basse des liIon, j’ai l’impression qu’on peut descendre à 2,5V…
À confirmer.
Rx
J’avais vu une video sur le sujet de Dave_C sur youtube il me semble (mais je la retrouve pas). En gros il mesure la baisse de tension au décollage pour rester en vol stationnaire (sag), cette baisse n’est pas considérée comme de la décharge (quand tu te poses la tension remonte immédiatement de la même valeur). Ce « sag » est beaucoup plus important sur une li-ion que sur une lipo. Dans mon cas (baby croc avec une li-ion 3000 mah), j’ai un sag de 1,5V (baisse de 16,7V à 15,2V au déco). Je considère que la batterie est vide quand je tombe à 11,7V (3,3×4-1,5). En cruising j’ai bien les 28mn d’autonomie annoncés par le constructeur.