Boost pour les brushless 65 : Project Mockingbird v3
 Envie de donner un coup de fouet à votre nano racer caréné ? C’est ce que propose le Project Mockingbird v3. Cela concerne principalement le UR65 (voir le test ici) ou son successeur le UK/US65 (voir le test là), mais il peut être adapté à d’autres appareils de même catégorie. Pas besoin de sortir le fer à souder, toutes les modifications sont logicielles ! Elles sont récapitulées dans ce document (ici), en anglais mais facile à comprendre.
Envie de donner un coup de fouet à votre nano racer caréné ? C’est ce que propose le Project Mockingbird v3. Cela concerne principalement le UR65 (voir le test ici) ou son successeur le UK/US65 (voir le test là), mais il peut être adapté à d’autres appareils de même catégorie. Pas besoin de sortir le fer à souder, toutes les modifications sont logicielles ! Elles sont récapitulées dans ce document (ici), en anglais mais facile à comprendre.
Ce qui est intéressant ?
 Piloter sauvagement en intérieur, en présence de beaucoup d’obstacles, peut être pénible en mode Acro, à moins d’être particulièrement doué. Pour se faire plaisir sans passer son temps à aller chercher l’appareil derrière un meuble, il vaut mieux piloter en mode stabilisé (Angle)… mais avec des réglages super agressifs ! Ils vous sont servis sur un plateau avec le Project Mockinbird v3, pour des moteurs 603 à 17000 ou 19000KV.
Piloter sauvagement en intérieur, en présence de beaucoup d’obstacles, peut être pénible en mode Acro, à moins d’être particulièrement doué. Pour se faire plaisir sans passer son temps à aller chercher l’appareil derrière un meuble, il vaut mieux piloter en mode stabilisé (Angle)… mais avec des réglages super agressifs ! Ils vous sont servis sur un plateau avec le Project Mockinbird v3, pour des moteurs 603 à 17000 ou 19000KV.
Une vidéo
Etape 1
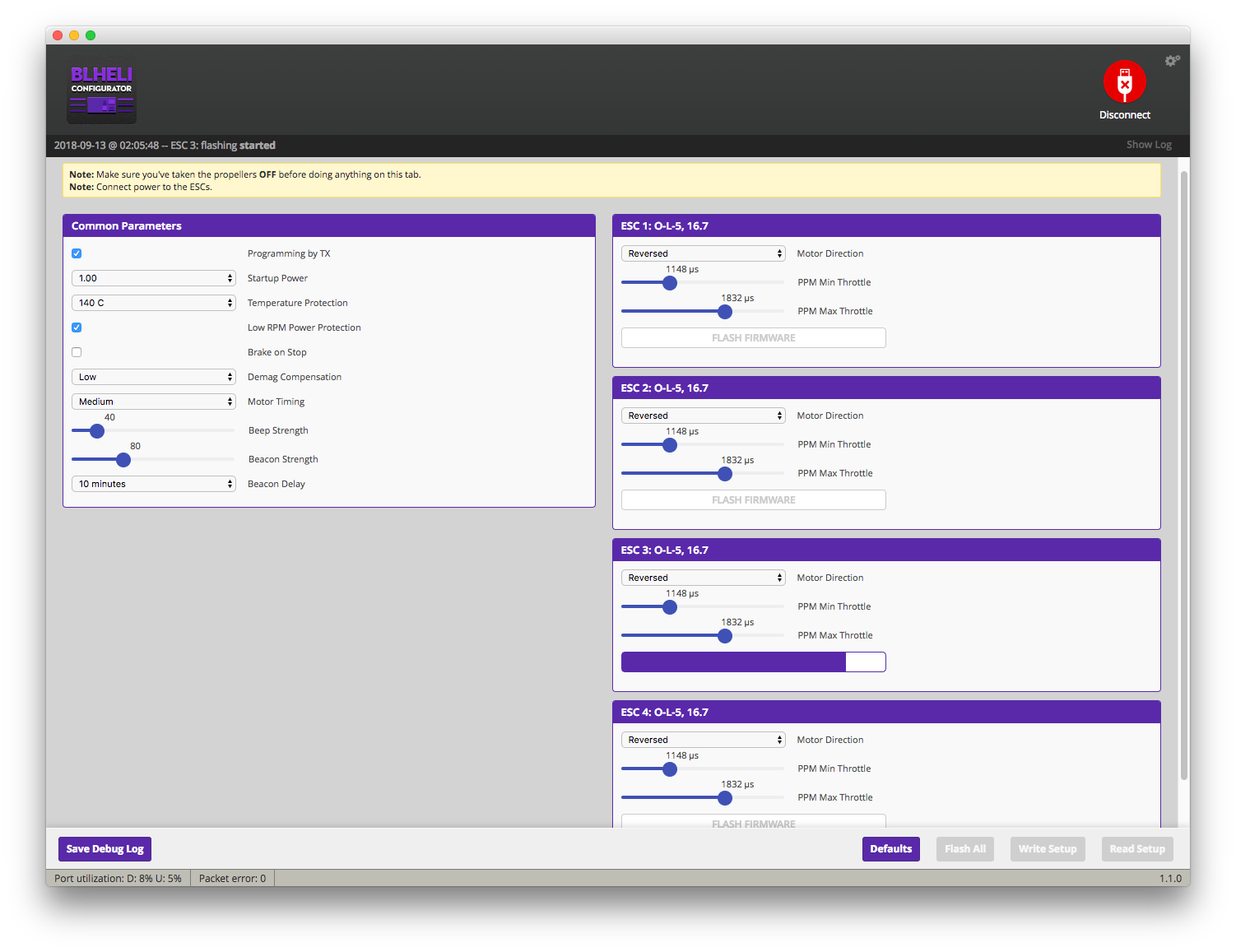 La première, c’est de changer le sens de rotation des moteurs. Le fameux « props out » de BetaFPV. Jusqu’à présent, cette inversion n’a pas donné de résultats probants sur la tenue en vol. Mais ça, c’était avant. La série des brushless survitaminés en 1S y gagne bel et bien dans les virages : ils sont plus propres, sans décrochages. Ca, c’est important quand on est tourne serré en intérieur ! Pour modifier le sens de rotation, ça se passe dans BLheli Configurator. Il ne faut pas non plus oublier d’échanger les hélices de place…
La première, c’est de changer le sens de rotation des moteurs. Le fameux « props out » de BetaFPV. Jusqu’à présent, cette inversion n’a pas donné de résultats probants sur la tenue en vol. Mais ça, c’était avant. La série des brushless survitaminés en 1S y gagne bel et bien dans les virages : ils sont plus propres, sans décrochages. Ca, c’est important quand on est tourne serré en intérieur ! Pour modifier le sens de rotation, ça se passe dans BLheli Configurator. Il ne faut pas non plus oublier d’échanger les hélices de place…
Etape 2
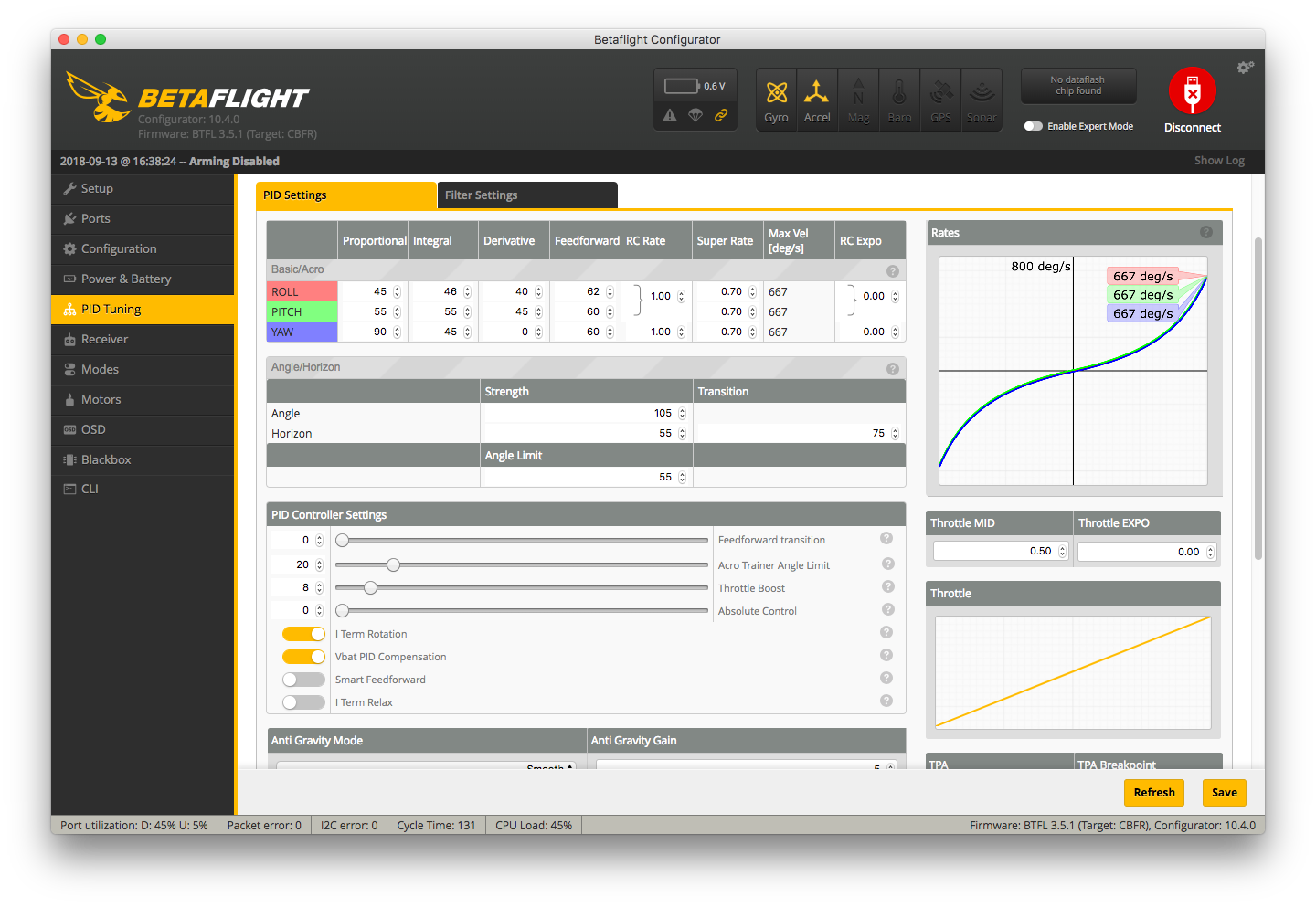 Elle consiste à flasher Betaflight en version 3.4 ou mieux – je suis passé en 3.5. La principale différence ? C’est la disparition du D Setpoint Weight. J’ai modifié le Feedforward manuellement, pour trouver la valeur optimale, pas trop brusque, pas trop molle. Pour le reste, tout est à peu près semblable. Il suffit de recopier les différentes valeurs, PID y compris, pour les modes Acro et stabilisés. Le tutorial offre même des réglages de courbes pour une Taranis QX7 de FrSky.
Elle consiste à flasher Betaflight en version 3.4 ou mieux – je suis passé en 3.5. La principale différence ? C’est la disparition du D Setpoint Weight. J’ai modifié le Feedforward manuellement, pour trouver la valeur optimale, pas trop brusque, pas trop molle. Pour le reste, tout est à peu près semblable. Il suffit de recopier les différentes valeurs, PID y compris, pour les modes Acro et stabilisés. Le tutorial offre même des réglages de courbes pour une Taranis QX7 de FrSky.
A vous !
 Il ne reste plus qu’à voler comme un dératé chez vous, en gymnase, dehors, en parking, bref partout où vous avez envie – dans le respect de la réglementation, cela va sans dire. J’ai testé la modification sur le UR65. Il était rapide et nerveux, il devient un petit bolide super réactif, y compris et surtout en mode Angle stabilisé ! Ne vous privez pas des modifications du Project Mockingbird v3, ce serait dommage… Merci à son auteur, Patrick J. Clarke, alias qreacher.
Il ne reste plus qu’à voler comme un dératé chez vous, en gymnase, dehors, en parking, bref partout où vous avez envie – dans le respect de la réglementation, cela va sans dire. J’ai testé la modification sur le UR65. Il était rapide et nerveux, il devient un petit bolide super réactif, y compris et surtout en mode Angle stabilisé ! Ne vous privez pas des modifications du Project Mockingbird v3, ce serait dommage… Merci à son auteur, Patrick J. Clarke, alias qreacher.


Bonne idée ! Merci pour l’info 😀
Mais je reve scretement d’un upgrade 2s de cette bestiole … 😉
Merci pour la trouvaille je vais tester de suite sur le us65 🙂
Génial ! Je vais certainement faire les modif pour mon ur 65 …?
Du coup pour le Feedforward Translation, quelle valeur as tu retenu ?
Titanium
Il existe le betafpv 65x ou 75x en 2s
Il y en a aussi sur rakonheli
J ai pas succombé pour ces tiny meme s ils ont l air clairement bon, j ai cherché et trouvé un tiny 2s qui pour moi represente une vrai avancé dans ce format
De plus si ca va trop vite en 2s dans des petits espaces et bien tu peux passer en 1s, c est pas mal au final
Bonjour et merci pour cette info, je vais aussi faire ces modifs en particulier pour voir ce que ça donne avec les virages serrés.
Suis bon pour refaire un stock de 1S car elles prennent cher.
Salut tu aurais possibilité de poster tes pid sur le uruav 65 en 3.5
Pour le Feedforward ?
Merci
Mes PID sont ceux de Mockingbird, j’ai mis le FW à 0.30 dans un premier temps. Depuis je suis repassé à 0.
Merci Fred pour le tuyau.
Hâte de recevoir mon UK65 pour essayer, mais bon, backorder pour le moment.
En 2S tu as le pepperfiish. Ajoute des protections d’hélices et tu peux aller en intérieur ^^. Après 2S en intérieur, tu restes avec le throttle au minimum. Le seul défaut c’est qu’il n’a pas d’OSD et comme il fonctionne en 1S et 2S il faut ajouter un mini beeper pour avoir l’info battery low.
à la question « dites-nous si vous pensez que la pratique a influencé notre jugement. » je pense que oui avec le temps et de la pratique c’est sûr, mais c’est vrai que c’est une bonne affaire.
@ lego37 : Ah oui mais là la question n’est pas posée 🙂 🙂