Le projet Dragon de JSK Lab
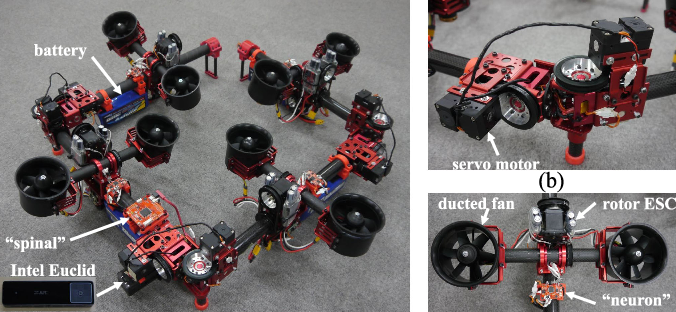
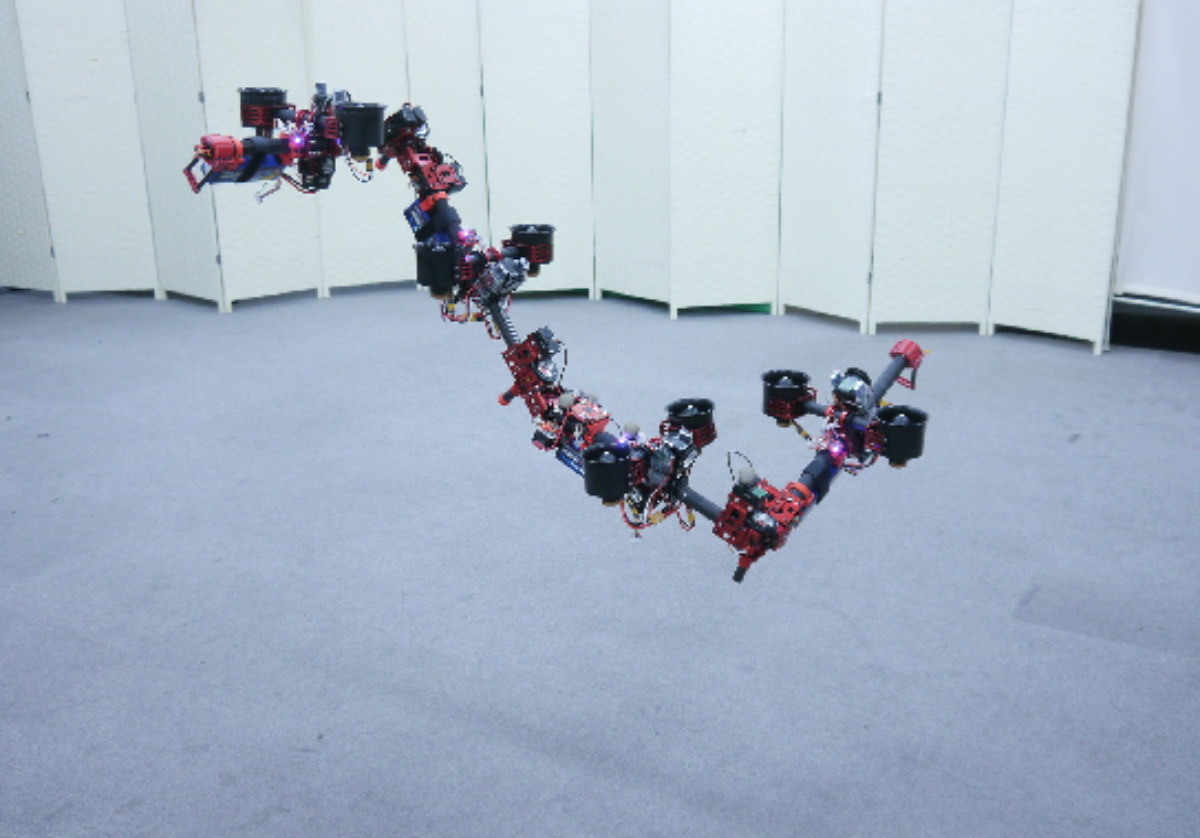 Cet appareil volant bizarre s’appelle le DRAGON. L’acronyme de « Dual-rotor embedded multilink Robot with the Ability of multi-deGree-of-freedom aerial transformatiON ». S’il affiche un petit air de dragon, aussi, c’est en raison de sa conception sous forme d’éléments solidaires montés sur des mécanismes à base de rotules et de servos. Il est propulsé par 8 moteurs qui entrainent des hélices protégées dans des tubes de type duct, orientables pour animer l’ensemble. C’est un projet imaginé par un groupe de chercheurs du département de mécanique et informatique de l’université de Tokyo, le JSK Lab. Il repose sur le composant Euclid d’Intel (dont la commercialisation a été abandonnée) qui inclut la technologie de détection des obstacles RealSense.
Cet appareil volant bizarre s’appelle le DRAGON. L’acronyme de « Dual-rotor embedded multilink Robot with the Ability of multi-deGree-of-freedom aerial transformatiON ». S’il affiche un petit air de dragon, aussi, c’est en raison de sa conception sous forme d’éléments solidaires montés sur des mécanismes à base de rotules et de servos. Il est propulsé par 8 moteurs qui entrainent des hélices protégées dans des tubes de type duct, orientables pour animer l’ensemble. C’est un projet imaginé par un groupe de chercheurs du département de mécanique et informatique de l’université de Tokyo, le JSK Lab. Il repose sur le composant Euclid d’Intel (dont la commercialisation a été abandonnée) qui inclut la technologie de détection des obstacles RealSense.
Le but ?
 L’équipe désire progresser dans le domaine des drones d’inspection d’environnements confinés, où les déplacements sont difficiles. Par exemple dans des tuyaux et des conduites où un multirotor classique est trop imposant. L’autonomie du prototype est de 3 minutes seulement, mais les chercheurs espèrent améliorer l’efficacité de la motorisation pour augmenter le temps de vol et multiplier les éléments de l’appareil. L’appareil a été présenté en vol à l’occasion de la International Conference on Robotics and Automation 2018 (ICRA).
L’équipe désire progresser dans le domaine des drones d’inspection d’environnements confinés, où les déplacements sont difficiles. Par exemple dans des tuyaux et des conduites où un multirotor classique est trop imposant. L’autonomie du prototype est de 3 minutes seulement, mais les chercheurs espèrent améliorer l’efficacité de la motorisation pour augmenter le temps de vol et multiplier les éléments de l’appareil. L’appareil a été présenté en vol à l’occasion de la International Conference on Robotics and Automation 2018 (ICRA).
Source : le document DRAGON publié par l’IEEE via DroneBelow


Je veux le même !
Pourquoi faire simple quand on peut faire compliqué.
De la folie cet engin !! Il manque une vidéo !
voila la vidéo ! https://www.youtube.com/watch?time_continue=86&v=zMi5v2KznU4