UrUAV UR65, le test
Turtle mode !
 Il n’en fallait pas plus pour activer le « Turtle mode », appelé « Flip over after crash » dans Betaflight Configurator. Il permet d’utiliser deux moteurs pour renverser l’appareil et le remettre d’aplomb. En fait, si, il en faut un petit peu plus : l’inversion des moteurs ne fonctionne pas avec le firmware d’origine des ESC. Mais il suffit de les flasher en 16.7 via BLheli configurator (une histoire de quelques secondes à peine) pour que tout rentre dans l’ordre. Même si l’appareil tombe sur le dos, vous n’aurez même plus à vous déplacer pour redécoller…
Il n’en fallait pas plus pour activer le « Turtle mode », appelé « Flip over after crash » dans Betaflight Configurator. Il permet d’utiliser deux moteurs pour renverser l’appareil et le remettre d’aplomb. En fait, si, il en faut un petit peu plus : l’inversion des moteurs ne fonctionne pas avec le firmware d’origine des ESC. Mais il suffit de les flasher en 16.7 via BLheli configurator (une histoire de quelques secondes à peine) pour que tout rentre dans l’ordre. Même si l’appareil tombe sur le dos, vous n’aurez même plus à vous déplacer pour redécoller…
Faut-il l’acheter ?
 Oh oui ! J’ai un coup de cœur de pour ce UR65 ! Il s’agit sans doute de l’un des nano racers brushless les plus agréables en vol, aussi bien pour des vols en intérieur quand la météo déraille qu’en extérieur dans un jardin (pas besoin qu’il soit de taille démesurée). Il est même capable d’aller taquiner les parcours de FPV racing montés pour des machines plus puissantes. Ok, ça fait un peu mobylette sur un circuit de F1, mais quel plaisir ! Avec son carénage, il brille par son absence de dangerosité. Les vols les plus excitants sont ceux pratiqués en forêt, entre les branchages, là où aucun autre multirotor n’ose se risquer, avec l’aide de son carénage. L’UR65 est vendu à partir de 71 € chez Banggood (avec le port mais hors taxes), avec un récepteur Flysky ou FrSky, 1 ou 3 batteries. UrUAV fournit un jeu d’hélices de rechange, un outil pour les extraire facilement, un tournevis, des vis de pod central, des élastiques (qui ne servent à rien), et un chargeur de batteries en USB compatible LiHV.
Oh oui ! J’ai un coup de cœur de pour ce UR65 ! Il s’agit sans doute de l’un des nano racers brushless les plus agréables en vol, aussi bien pour des vols en intérieur quand la météo déraille qu’en extérieur dans un jardin (pas besoin qu’il soit de taille démesurée). Il est même capable d’aller taquiner les parcours de FPV racing montés pour des machines plus puissantes. Ok, ça fait un peu mobylette sur un circuit de F1, mais quel plaisir ! Avec son carénage, il brille par son absence de dangerosité. Les vols les plus excitants sont ceux pratiqués en forêt, entre les branchages, là où aucun autre multirotor n’ose se risquer, avec l’aide de son carénage. L’UR65 est vendu à partir de 71 € chez Banggood (avec le port mais hors taxes), avec un récepteur Flysky ou FrSky, 1 ou 3 batteries. UrUAV fournit un jeu d’hélices de rechange, un outil pour les extraire facilement, un tournevis, des vis de pod central, des élastiques (qui ne servent à rien), et un chargeur de batteries en USB compatible LiHV.
D’autres photos

























Merci pour le test !
A choisir entre le snapper 7 et le UR65 ? Un avis perso ?
Tres bon article,bien détaillé.
Quel télécommande as-tu utilisé pour binder en D16 ? Est-ce bien du D16-EU-LBT ?
Car pour moi, impossible de binder cette FC en D16 avec ma Taranis « EU-LBT ». Uniquement D8.
J’arrive a la binder en D16 uniquement en passant par mon 4-in-1 multiprotocol module ( qui et en D16 US, je crois )
Salut.
Voici une vidéo en extérieur avent une légère brise. On sent bien l’accélération vent dans le dos, et la galère dans l’autre sens:
https://youtu.be/GYCdQ5cmgoY
Je n’avait pas encore mis a jours le firmware de l’ESC. Du coup je n’avais pas de turtlemode.Mais il peut aussi buzzer des moteurs je pense…
@ Fred Tahiti : Le UR65 pour sa structure qui se change quand tout est ruiné…
@ dudu du76 : J’ai utilisé une T8SG V2.0 Plus. Le D16 est NON-EU, c’est normal que ça ne passe pas sur une Taranis EU en D16…
C’est une bombe ….
Merci fred pour ce test, sans doute mon prochain achat en remplacement de mon Qx 90C .
Je réfléchis entre le snapper 7 ou celui-ci mais je pencherais vers le snapper car lui aussi, on peut changer chassis et moteur même si le prix est beaucoup plus élevé 16€ sur banggood et surtout l’autonomie 4 min30 ..
Merci à toi Fred pour ces 2 tests , ça nous aide beaucoup.
Bonjour,
Quel nano de ce type et de cette taille existe t’il en DSMX pour une Spektrum?
@ GUI78 : Tu as le tableau des nano racers qui récapitule toutes les machines que j’ai testées, avec mention aux protocoles radio disponibles, ça se passe ici.
Pas de DSM2, snif…..
T’es vraiment le diable en personne @fred !
Même si un temps de vol… Leger, on ne peut que succomber devant ses caractéristiques et son plaisir tres certain à le piloter.
Merci bcp pour ce test et… Bon vol !
Wahooooo, le tableau récapitulatif nano racers !!
Very nice job Fred !
Merci.
Bonjour,
en Frsky, est-ce compatible avec le module DJT-JR ? Ce module étant compatible D8R et D8R-ii, est-ce bien la même chose que le D8 tout court ?
merci pour le test !
@ CriTof 😀 😀 😀
@ Olivier : Sorry, je ne sais pas, je n’ai jamais eu ce module en mains… J’espère que qq’un d’autre saura répondre.
Il a l’air top !
Meme de nuit : https://www.youtube.com/watch?v=UOWUbS9PHjw
Pas moyen de passer en 100mW?
Il n’y a pas que BetaFPV ou Boldclash qui propose de bons nanos brushess / brushed.
Je l’ai vu voler plusieurs fois lors de notre rencontre fort sympathique à Chamrousse entre pilotes de tous bords de l’Isère (voir vidéo de Sylvain plus haut).
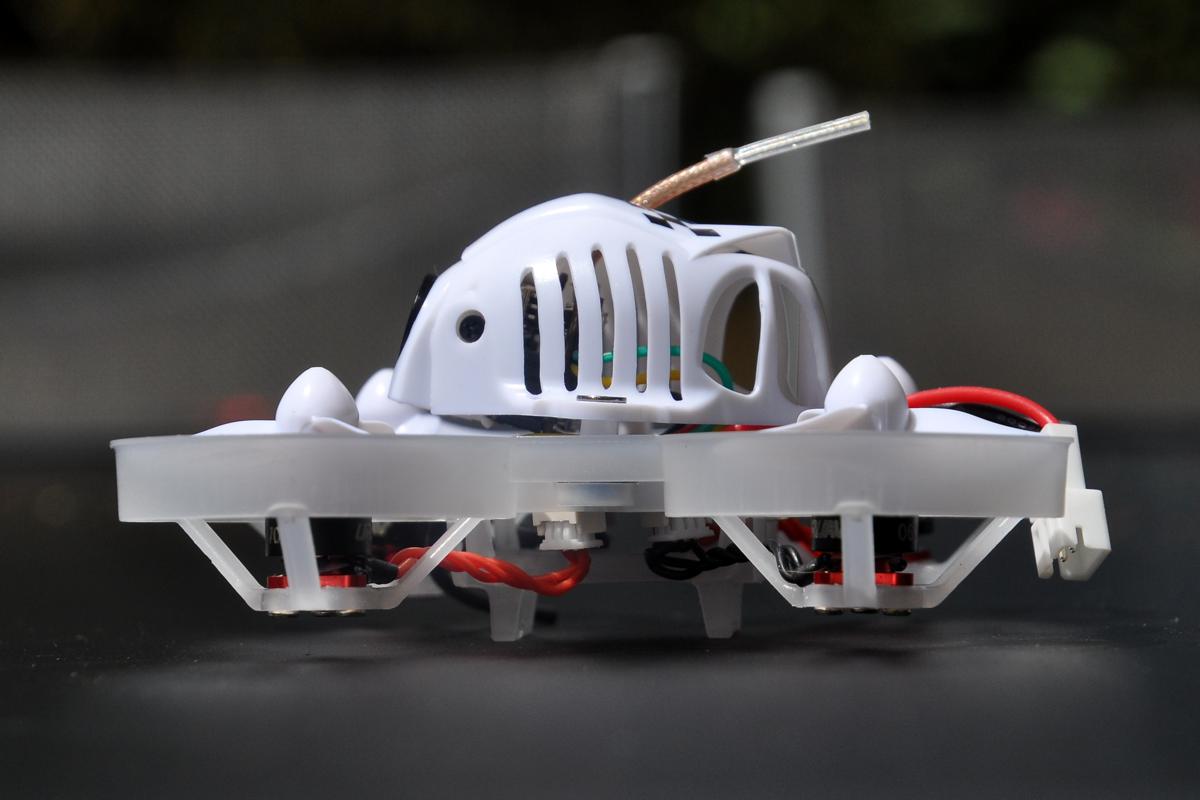
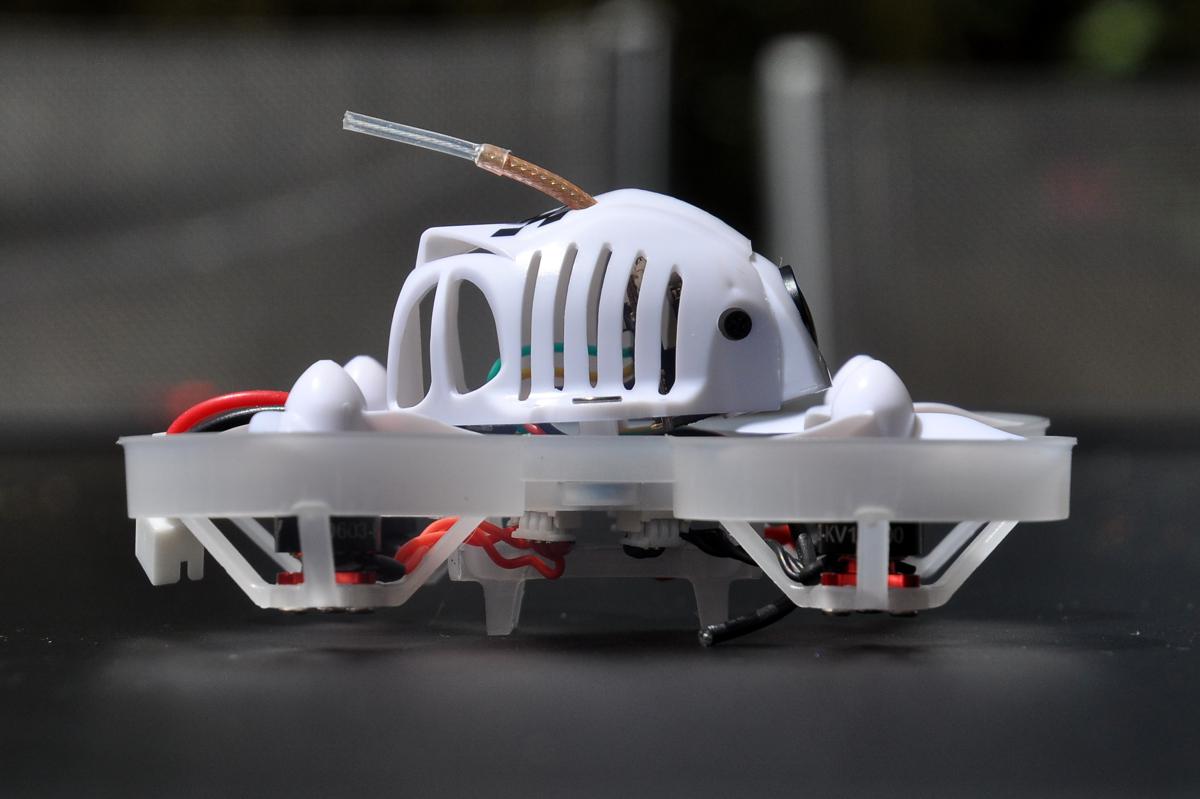
Il est super mimi. Il a une bonne petite bouille, dispose d’un bon petit carénage, d’une bonne petite pêche en vol et je trouve que son prix est tout à fait raisonnable (la plupart des machines de ce type sont comprises entre 90 > 130€)
Merci @Fred pour les screenshots écran BetaFlight adossés à tes tests car ça peut être utile pour y voir plus clair niveau paramétrage.
Merci pour le test bien détaillé, la machine fait envie !
Seule regret, j’aurais aimé que les supports moteurs soient individuels pour les changer plus facilement en cas de casse.
Fred, tu me dis « Le D16 est NON-EU ».
Ca me semble une info importante pour un public francais 🙂
Surtout que, pas moyen de le re-flasher avec un firmware EU, comme on pourrait le faire avec un « vrai » RX frsky.
Et je n’en ai pas trouvé mention nulle part, ni sur la page banggood du URUAV65, ni sur celle de la FC crazybee.
@ dudu du76 : Oui, c’est vrai que je ne le mentionne plus depuis pas mal de temps, les récepteurs achetés hors d’Europe sont dans leur grande majorité Non-EU…
J’espère maintenant que les future MAJ du firmware puissent permettre de choisir EU/Non-EU.
Je vois a priori rien qui l’interdise techniquement, c’est le même circuit RF…
En tout cas, encore merci pour ce bon article.
Salut Fred !
Super test, vraiment sur ce site, vous fournissez de la qualité !
Mais serait-il possible que vous mettiez à jour le tableau comparatif des nano racer ?
Voilà c’est tout 🙂
@ L4urentz : Si c’est une mise à jour sur les prix, non, pitié, ce serait un boulot à plein temps rien que pour faire ça 😉
Pour le reste, normalement les critères sont à jour…
Voila c est fait merci Fred 😉
J ai craqué depuis le temps que je rêvais d’un quad Côme celui-ci.
Je m éclate beaucoup plus avec les TinY.
Il me reste à commander les HD0 et une TX X-Lite pour avoir un SET portatif de rêve lol
Arrrrg j’ai commandé le snapper 7 avant ce test ! Pour une fois que tu as un vrai coup de coeur sur un nano brushless, j’aurai peut être pris celui ci ! A priori la seule différence notable c’est le chassis plus costaud ? Pas vraiment les perfs ?
@ Raynoxis : No worry, tu ne seras pas déçu par le Snapper7, c’est une excellente machine 🙂
Pour aller avec ce quad 250mh c est suffisant ? Fred tu as testé des 450mh avec? Cela ne l alourdit pas trop? On passe ainsi peut être les 3min?
Sur bangood j ai trouvé celle-ci même taille et semblerait-il même poids que celle fournies en standard.
2Pcs GAONENG GNB 4.35 V 450 mAh 1S 80 C HV Batterie PH2.0 Plug Pour E010 M80S Tiny7 RC Modèle
@ Pif : Oui, j’ai essayé avec une 450 HV 50C de LDARC. L’autonomie passe à presque 5 minutes, ce qui est top. Mais la machine perd sérieusement en vivacité et prend plus d’inertie. Je dirais que c’est sympa pour des vols tranquilles avec un peu plus d’inertie, ça permet de se faire plaisir plus longtemps. Je vais le rajouter dans le test…
Mais alors Fred, de ton analyse, on se rapproche du snapper 6 qui lui a des moteurs à 19000kv je crois, quel est celui que tu préfères entre le UR65, le snapper 6 et le snapper 7 ?
Bonjour,
Au niveau de la vitesse est il plus rapide que un tiny 8x?
Merci d’avance
Bonjour Fred,
Je trouve étonnant que beaucoup de personne se retrouvent embétés avec les différents protocoles, alors que maintenant il existe des modules externe multiprotocole qui marche du tonnerre. Plus besoin de changer de radio etc … Surtout avec la communication entre le module et la radio, tout passe par l’ecran de la radio et c’est trés simple d’utilisation. J’ai un combo taranis QX7 + IrangeX R4X Pro . Même plus besoin de savoir si c’est EU, non-eu , FRsky, DSMX etc … Une bonne alternative a 30 euros plutot que d’acheter une radio supplémentaire multiprotocole … Je pense qu’un petit article sur ce genre de produit permettrait au débutant d’éviter quelques déconvenues 😉
J’adore ce UR65, par contre j’ai essayé d’activer le turtle mode mais dès que je l’active dans les modes, impossible d’armer le drone.
Le beeper veut pas non plus marcher par contre si je l’active le drone marche normalement contrairement au turtle mode.
Bonjour à tous,
@Fred: merci de confirmer que j’ai fait un bon choix en achetant le Uruav 65 (Premier drone brushless pour moi).
Par contre, même souci que LoWLoW82:
– impossible d’utiliser le turtle mode (ESC flashés en 16.7).
– Impossible de configurer pour que les moteurs bipent comme un buzzer.
Si une âme charitable pourrait m’aider, je la remercie d’avance.
Bon vol à tous
Lionel (Grand NewBie en drone Brushless)
Bonjour Fred,
Je viens de recevoir mon UR65 en Frsky.
Et comme mentionné plus haut je n’arrive pas à le binder en D16 avec ma Taranis X7S (EU-LBT)
Existe-t-il une solution?
PS: j’ai pris ce drone pour débuté et me faire la main, avant de voler avec le Racer des 11ans que j’ai gagné sur StudioSPORT + Taranis + lunettes Fatshark (Trop de chance !!!)
D’avance Merci
@Carpediem440 j ai le miens ce soir il est actuellement dans la boite aux lettres
beaucoup disent ici qu ils faut binder en D8 et pas D16
je fait donc le test ce soir et si ca marche pas google et les forums 😉
J’ai reçu le miens hier, mais malheureusement il n’a pas l’air fonctionnel.
Au moment de l’ « armé » il reste bloqué en calibration, j’ai updaté le firmware, réduit l’échantillonnage mais rien n’y fait les gyroscope sont toujours a 0
j’espere que Banggood va me le changer sans faire trop d’histoire
J’ai reçu ce jour le drone.
J’ai du le mettre en D8 avec ma Taranis QX7.
Malheureusement, l’emplacement moteur arrière gauche ne fonctionne pas, j’ai interverti les moteurs pour connaitre le coupable: Moteur ou FC…
C’est la FC puisque les 2 moteurs tournent parfaitement sur l’emplacement avant droit.
je ne sais pas quoi faire, j’ai laisser un message à Banggood avec vidéos à l’appui….
est ce que quelqu’un a rencontré ce genre de problème avec ce drone et avec banggood ( j’ai toujours était satisfait de ce site)
A suivre et merci
Xavier R
Bonjour,
@pif oui j’ai vu que l’on pouvait le binder en D8, mais malheureusement la Taranis QX7S EU n’est pas compatible D8
Donc je recherche toujours une solution sur le net…
Utilise un module externe multiprotocole ils sont eu et non eu, tu n’auras plus de soucis.
bon pour moi aucun pb pour binder en D8
la documentation fournie avec le racer est top elle indique precisement les points specifique du racer et permet de regler le racer en 5min
par contre impossible de l armer…
dans betaflight le switch affecté a la voie ARM bouge bien
il se place dans la zone jaune mais le carré ARM ne s allume pas… le drone bip deux fois ce qui indique un pb de failsafe…
je pense que la liaison radio est pas terrible comme la vu fred
(ps j en suis a 5h de config donc facil 3 pour le probleme d’armement j’ai du voir toutes les videos youtube sur le sujet 😉
@pif essaye de regarder la derniere ligne de la commande CLI « status » dans betaflight-configurator, il te diras pourquoi tu reste disarmed (pour ma part c’est la calibration des gyroscpoes)
@MioGUI c était un état transitoire déclenchement du failsafe suite à un rx loss.(erreur 3)
avec la CLI j ai modifiè la variable failsafe_delay de 4 (400ms) a 40 (4s) mais bien entendu il faut affiner 😉 je voulais le vir decoller se machin 😉
il s arme correctement maintement mais j ai des coupures du VTX… Parasitages des moteurs?
une gentilles personne peut elle me dumper une super config qui marche bien avec un beau vol fluide 😉 merci
Bon ça vole nikel ^^
Il me rfaut st a m entraîner 8h/j pour piloter aussi bien que lui : https://youtu.be/ROGp8qOPZIk
Vraiment top j en veux un deuxième 😉
Je l’adore aussi… un pur bonheur en tous points. A vu, je m’éclate !! ???
Par contre j’ai du mal en fpv. Parasites et coupures à plus de 4, 5 mètres. Donc, interieur impossible dés le 1er mur. Un expert pour me conseiller? Je débute ?
Merci ☺
Concernant mon problème de moteur… c’était simplement les fil du moteur qui touchaient le rotor… j’ai noué les fil sur le châssis avec un mini élastique trouvé dans une mercerie.
Avec les chutes… nombreuses avec moi … la caméra sors de son logement, j’ai utilisé également des élastiques
sinon mes premiers vols en extérieures :
https://youtu.be/rERQQttpo58
et
https://youtu.be/EI5P_yw0UlA
Sinon c’est un super multirotor
Les reproches : qualité caméra, portée du vtx assez faible et pas de buzzer ( seulement les moteurs) il serait idéal…
Bonjour,
Reçu le mien hier, avec les 3 batteries et le petit chargeur très pratique – je pourrai utiliser une de mes lipo 4S comme source d’énergie pour recharger, en extérieur.
En étant un peu méthodique et avec des connaissances de base de betaflight, le bind en D8 se fait sans souci.
Un moteur qui a un peu de mal à se lancer, il doit y avoir qque chose qui le contrarie mais je n’ai pas identifié quoi. Sinon, il vole super bien, très stable et vif. Je n’ai pas encore testé le mode acro, ça va surement mieux passer qu’avec mes nano eachine brushed.
Effectivement on en tire tout son parti en immersion, c’est vraiment plaisant. Quelques cochonneries (artefacts ?) s’affichent en haut des écrans de mes lunettes EV100 je vais bricoler l’OSD, une nouveauté pour moi. Je n’ai pas encore osé faire la manip sur les moteurs pour bénéficier du turtle mode.
Je vais rapidement commander des pièces de rechange, moteurs, châssis, et d’autres batteries.
Je recommande vivement.
Bons vols !
HELP?
Quand j’active le mode « turtle (flip over after crash) je ne peux plus armer mon drone ?
Avez vous une idées ?
Merci
Xavier
Pour répondre à Olivier ( je ne sais pas comment le faire sur le site ) « Un moteur qui a un peu de mal à se lancer, il doit y avoir qque chose qui le contrarie »
c’est surement le câble d’alimentation du moteur qui touche la cloche du moteur donc l’empêche de tourner, je l’ai ai fixer sur le châssis avec un élastique de mercerie
Pour info pour ceux qui cherchent a faire beepper les moteurs :
Comme l’a fait fred commencer par flasher les ESC avec BLHeli à partir de la version 16.7.
Ensuite dans Betaflight configurator aller dans le CLI et taper :
Set beeper_dshot_beacon_tone = 3
(appuyer sur entré)
puis taper:
save
(appuyer sur entré)
Logiquement ca reboot, retourner dans le CLI et taper ceci pour savoir si c’est ok:
get beeper_dshot_beacon_tone
(appuyer sur entré)
et devriez avoir ceci qui s’affiche:
# get beeper_dshot_beacon_tone
beeper_dshot_beacon_tone = 3
Allowed range: 0 – 5
s’achant que dans mon exemple j’ai mis 3 comme valeur, mais vous pouvez aller de 0 à 5
Voili voilu …
Bonjour,
le fil 5v de la prise batterie s’est dessoudé en branchant une lipo, ça a cramé un esc (si tant est qu’il y ait bien une alimentation distincte des esc pour chacun des moteurs ??) donc je pense que la carte est foutue. Les 3 autres moteurs tournent et tout est fonctionnel sur le reste de la carte, après avoir ressoudé le fil d’alim, mais le moteur arrière gauche tressaute à peine et ça sent le chaud ! Je suis bon pour commander une fc crazybee de rechange, ce qui m’inquiète c’est la soudure des 4 fils du combo caméra TX, bonne galère en perspective.
Quelqu’un a déjà été confronté à ça ?
Par ailleurs j’ai juste avant avec une lipo 450 mah (beaucoup plus lourd !), ça a peut être ‘fatigué’ le FC ?
Merci
Pour ceux a qui ca interresse j’ai dessiné un support pour des batteries 450mah que voici:
https://www.thingiverse.com/thing:3032981
Bonjour à tous,
je pense avoir bricker la FC de mon URUAV UR65 en mettant à jour sous bétaflight.
A votre avis, est-ce que je peut la remplacer par une betafov brushless F4 1S:
https://betafpv.com/collections/flight-controller-1/products/f4-1s-brushless-flight-controller
Merci d’avance
Bon vol à tous
Lionel
Bonjour,
j’ai remplacé la FC Crazybee en faisant très attention aux soudures des fils batterie et camera/vtx . Il vole à nouveau très bien, sauf que j’ai des indications erronées concernant le voltage (25 V avec une lipo 4.3V, et 10V en USB ?!?) et une charge CPU à 34% alors que j’ai tous les paramètres réglés comme indiqué, notamment les fréquences 8 et 2 kHz.
Vous pensez que ça pourrait être le résultat d’un micro – coup de fer à souder sur un composant de la carte ? J’ai pourtant fait hyper gaffe, mais c’est tellement petit.
Si vous avez une idée…
merci
Bonjour Fred,
est-ce qu’il est possible d’avoir le DUMP de ton URUAV UR65, STP.
Car je vois que tu arrives à utiliser le « Turtle Mode » à la fin de ta vidéo, et cela m’intéresse beaucoup.
Merci d’avance
Bon vol à tous
@Lionel : Voilà mon dump…
Merci Fred, pour ton dump et ta rqpiditè.
@Fred,
j’ai mis dans « bétaflight » sous « Mode » « flip over crash » sur SH (Taranis QX 7), c’est bon, car cela ne marche toujours pas…
Salut à tous,
quelqu’un a déjà essayé ces batteries?
https://www.banggood.com/GAONENG-GNB-4_35V-450mAh-1S-80C-HV-Battery-PH2_0-Plug-For-E010-M80S-Tiny7-RC-Model-p-1303156.html?rmmds=detail-popup-addwish-alsoview&cur_warehouse=CN
@Muller oui moi et elles sont ENORME !
Je les fait tenir avec des élastiques et en cas de Crash…
Je te conseille celle-ci https://betafpv.com/products/300mah-1s-30c-hv-battery-8pcs
Sur le group ur65 de Facebook ils en disent du bien, certain ont fait une rallonge des fils connecteur pour mieux centrer les masses. Les miennes doivent arriver chez moi très bientôt.
@Muller j’en pris aussi et effectivement ça alourdit bien la bête, ça permet des vols plus tranquilles de 4 – 5 mn, mais ça fatigue peut être les moteurs sur les gros coups de gaz ? Je les fixe avec un tout petit scratch. Les batteries d’origine sont bien mais quand même chères et j’en ai détruit deux au niveau de leur connecteur jst (si quelqu’un connait une manip pour les solidifier sans trop alourdir). Du coup j’en ai pris des charsoon à 12€ les 5 mais elles sont pas terribles. Celles évoquées par @Pif ont l’air très bien.
Vous etes sous FrsKyX ou FrskyD sur la FC ?
Quand j’accelere j’ai des actions bizarre sous Betaflight et surtout le Roll qui augmente a la place du Throttle ….vous en dites quoi les specialistes ? carte FC HS ?
Bonjour,
j’ai explosé la caméra du mien et éparpillé les pièces, ça a du se dévisser avec les vibrations au fur et à mesure. Elle fonctionne toujours mais sans la lentille, qui pourtant n’est pas cassée. quand je pose la lentille en vissant la couronne, ça reste flou, sur toute la course du pas de vis.
Quelqu’un sait de quoi est composé exactement l’objectif de la caméra ? Je me demande s’il manque pas une pièce : La lentille est elle en deux pièces ?
Merci !
Bonjour Olivier,
Pour avoir démonté plusieurs caméra, je peu te dire que dans la lentille elle même, il y a plusieurs pièces 4 à 6 env.)
Merci Lionel, plusieurs pièces d’optique transparentes ? Pas de regrets d’avoir racheté une autre caméra alors, l’aspirateur est passé par là depuis.
Peut on l’utiliser avec une radio commande flysky fs i6
@ Yannick : Oui, il faut choisir la version avec le récepteur Flysky.
J’ en ai récupéré un d occaz je suis étonné de mon autonomie vrai faible.
Déjà il consomme 0.3a juste armé sans rotation des moteurs ça me paraît beaucoup ?
En vol je suis a 3.5a 4a en stationnaire
Vous pouvez m’indiquer vos conso moteurs arrêté et en stationnaire ? Merci