Realacc Scops 100 Y4, le test
 Voilà une très intéressante machine que ce Scops 100 Y4. Comme son nom le laisse supposer, il s’agit d’un modèle Y4. Ce qui signifie qu’il est de type tricoptère… mais avec 4 moteurs et 4 hélices. En effet, le rotor à l’arrière est doublé, monté en coaxial. C’est–à-dire que les deux moteurs se font dos. Pour le moins inhabituel, mais… est-ce que ça fonctionne ? Réponse dans cette chronique. Notez que le Scops 100 YA nous a été donné par la boutique Banggood. Comme d’habitude, dites-nous si vous pensez que la pratique a influencé notre jugement.
Voilà une très intéressante machine que ce Scops 100 Y4. Comme son nom le laisse supposer, il s’agit d’un modèle Y4. Ce qui signifie qu’il est de type tricoptère… mais avec 4 moteurs et 4 hélices. En effet, le rotor à l’arrière est doublé, monté en coaxial. C’est–à-dire que les deux moteurs se font dos. Pour le moins inhabituel, mais… est-ce que ça fonctionne ? Réponse dans cette chronique. Notez que le Scops 100 YA nous a été donné par la boutique Banggood. Comme d’habitude, dites-nous si vous pensez que la pratique a influencé notre jugement.
Une vidéo
Tour du propriétaire
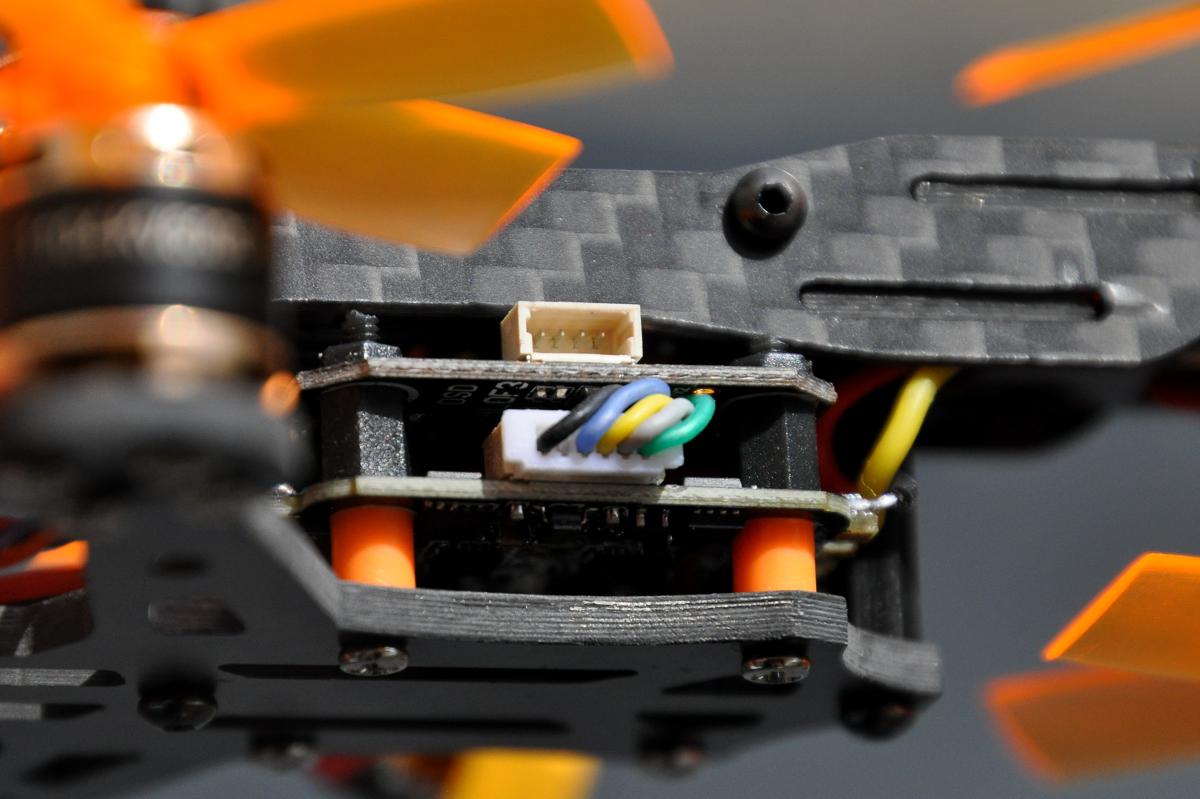
 L’appareil fait d’une plaque inférieure en carbone assez épaisse, de 2 mm, rigidifiée par deux longs renforts latéraux. L’arrière de l’appareil est prolongé par deux autres renforts latéraux qui servent à fixer les moteurs de queue. Le contrôleur de vol, un Omnibus flashé en Betaflight 3.1.0, dépasse un peu sur les côtés. Mais le montage a été réalisé assez soigneusement, aucun fil ne traine et ne risque d’être arraché. Un ESC 4 en 1 de 10A est monté sous le contrôleur de vol, pour alimenter les 4 moteurs. Lesquels sont de modèles brushless 1104 à 6000KV avec des hélices 5 pales 2035. Les deux à l’avant sont classiques. Les deux à l’arrière sont montés en coaxial, l’un pointe vers le haut en CW (sens des aiguilles d’une montre), l’autre en CCW (sens contraire des aiguilles d’une montre).
L’appareil fait d’une plaque inférieure en carbone assez épaisse, de 2 mm, rigidifiée par deux longs renforts latéraux. L’arrière de l’appareil est prolongé par deux autres renforts latéraux qui servent à fixer les moteurs de queue. Le contrôleur de vol, un Omnibus flashé en Betaflight 3.1.0, dépasse un peu sur les côtés. Mais le montage a été réalisé assez soigneusement, aucun fil ne traine et ne risque d’être arraché. Un ESC 4 en 1 de 10A est monté sous le contrôleur de vol, pour alimenter les 4 moteurs. Lesquels sont de modèles brushless 1104 à 6000KV avec des hélices 5 pales 2035. Les deux à l’avant sont classiques. Les deux à l’arrière sont montés en coaxial, l’un pointe vers le haut en CW (sens des aiguilles d’une montre), l’autre en CCW (sens contraire des aiguilles d’une montre).
Suite du tour
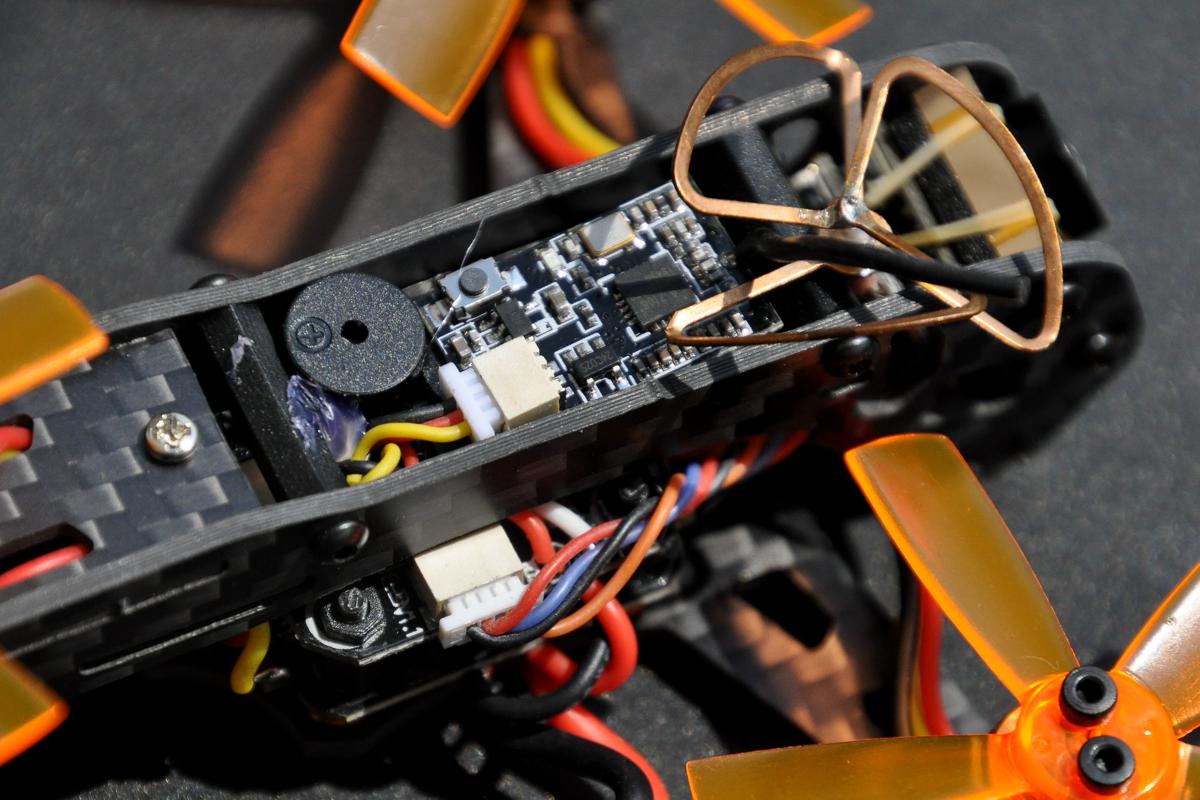 La caméra à l’avant, une 600TVL à inclinaison réglable, fait partie d’un combo FPV. Elle est associée à un émetteur 5,8 GHz de 25 mW et 48 canaux, avec une antenne polarisée à 3 lobes. Bonus : un buzzer est placé sur le dos de l’appareil. Le récepteur, une version Flysky sur le modèle que j’ai testé, est confortablement placé dans une sorte de berceau sur le dos du Scops 100 Y4. La batterie est prévue pour être logée sous l’appareil, c’est donc elle qui fera office de train d’atterrissage. Un nécessaire train d’atterrissage, puisque l’hélice inférieure arrière touche le sol sans la batterie. La batterie en question est une Lipo 3S 11,1V de 550 mAh et 40C, fournie avec l’appareil. Elle est connectée via une prise XT30.
La caméra à l’avant, une 600TVL à inclinaison réglable, fait partie d’un combo FPV. Elle est associée à un émetteur 5,8 GHz de 25 mW et 48 canaux, avec une antenne polarisée à 3 lobes. Bonus : un buzzer est placé sur le dos de l’appareil. Le récepteur, une version Flysky sur le modèle que j’ai testé, est confortablement placé dans une sorte de berceau sur le dos du Scops 100 Y4. La batterie est prévue pour être logée sous l’appareil, c’est donc elle qui fera office de train d’atterrissage. Un nécessaire train d’atterrissage, puisque l’hélice inférieure arrière touche le sol sans la batterie. La batterie en question est une Lipo 3S 11,1V de 550 mAh et 40C, fournie avec l’appareil. Elle est connectée via une prise XT30.
Réglages
 Pas de port microUSB sur le contrôleur de vol : il est remplacé par un connecteur petit format facile d’accès. Un câble avec le même connecteur et une prise USB est fourni dans la boite, accompagné par un autre câble avec ce connecteur et une rallonge pour microUSB. Betaflight Configurator permet d’accéder aux réglages. Il n’y a pas grand-chose à faire, tout est réglé en usine. Petit détour, par curiosité, dans les réglages du type de frame : Betaflight comprend une sélection « Y4 ». Pratique ! L’appairage de la radiocommande est rapide, en AFHDS 2A avec Failsage opérationnel. Il reste simplement à choisir la méthode d’armement des moteurs, et le choix des modes de vol.
Pas de port microUSB sur le contrôleur de vol : il est remplacé par un connecteur petit format facile d’accès. Un câble avec le même connecteur et une prise USB est fourni dans la boite, accompagné par un autre câble avec ce connecteur et une rallonge pour microUSB. Betaflight Configurator permet d’accéder aux réglages. Il n’y a pas grand-chose à faire, tout est réglé en usine. Petit détour, par curiosité, dans les réglages du type de frame : Betaflight comprend une sélection « Y4 ». Pratique ! L’appairage de la radiocommande est rapide, en AFHDS 2A avec Failsage opérationnel. Il reste simplement à choisir la méthode d’armement des moteurs, et le choix des modes de vol.
Premier décollage
 Il est effectué à vue, comme d’habitude, et en Horizon pour une stabilisation, histoire de vérifier que tout va bien. Petite appréhension à voir le rotor inférieur arrière très proche du sol… Mais le Scops 100 Y4 décolle avec pas mal de puissance, avec très peu de dérive. Première constatation en maintenant un vol stationnaire : il est très nerveux et réagit fort aux sollicitations des joysticks. Ce sera un appareil à manier avec douceur pour éviter les brusques embardées – à moins de les souhaiter, bien sûr. La stabilisation se dégrade au bout d’une minute de vol, avec une déviation dans une direction (pas toujours la même) qui empire, à tel point qu’il faut se poser, désarmer et réarmer pour poursuivre le vol. Bizarre. Redécollage, toujours à vue, mais sans stabilisation, en Acro et Airmode. Pas de dérive constatée… Ouf.
Il est effectué à vue, comme d’habitude, et en Horizon pour une stabilisation, histoire de vérifier que tout va bien. Petite appréhension à voir le rotor inférieur arrière très proche du sol… Mais le Scops 100 Y4 décolle avec pas mal de puissance, avec très peu de dérive. Première constatation en maintenant un vol stationnaire : il est très nerveux et réagit fort aux sollicitations des joysticks. Ce sera un appareil à manier avec douceur pour éviter les brusques embardées – à moins de les souhaiter, bien sûr. La stabilisation se dégrade au bout d’une minute de vol, avec une déviation dans une direction (pas toujours la même) qui empire, à tel point qu’il faut se poser, désarmer et réarmer pour poursuivre le vol. Bizarre. Redécollage, toujours à vue, mais sans stabilisation, en Acro et Airmode. Pas de dérive constatée… Ouf.
Les sensations en immersion
 Le retour vidéo offre une incrustation avec un OSD, qui affiche de nombreuses informations. Comme souvent, l’horizon est faux, en rotation de 90°. Qu’à cela ne tienne, il suffit de le désactiver. Pas besoin de faire appel à Betaflight Configurator sur un ordinateur, l’OSD est actif. Une combinaison de touches (indiquée par Betaflight à l’allumage) permet d’entrer dans les réglages de Betaflight, notamment ceux pour choisir les informations affichées par l’OSD pendant le vol. Il est conseillé de retirer l’horizon artificiel, il ne sert à rien. Premier vol en immersion : le décollage est rapide, l’appareil prend de la vitesse. J’esquisse un virage et puis… perte des commandes. Le Scops 100 Y4 vient s’écraser dans l’herbe. Rien de cassé, mais l’incident refroidit, après 10 secondes de vol à peine…
Le retour vidéo offre une incrustation avec un OSD, qui affiche de nombreuses informations. Comme souvent, l’horizon est faux, en rotation de 90°. Qu’à cela ne tienne, il suffit de le désactiver. Pas besoin de faire appel à Betaflight Configurator sur un ordinateur, l’OSD est actif. Une combinaison de touches (indiquée par Betaflight à l’allumage) permet d’entrer dans les réglages de Betaflight, notamment ceux pour choisir les informations affichées par l’OSD pendant le vol. Il est conseillé de retirer l’horizon artificiel, il ne sert à rien. Premier vol en immersion : le décollage est rapide, l’appareil prend de la vitesse. J’esquisse un virage et puis… perte des commandes. Le Scops 100 Y4 vient s’écraser dans l’herbe. Rien de cassé, mais l’incident refroidit, après 10 secondes de vol à peine…


@Fred Je l’ai bien aimé celui ci 🙂 Pareil j’avais des craintes … Par contre tu as pas du changé l’orientation de la dérive sur betaflight ? moi j’ai du mettre 180 degres ? Ton connecteur pour l’USB est sur la gauche ou la droite ?
Je vois il semble sur la gauche … moi c’était sur la droite …. Ils ont du corrigé ce petit bug technique….
@ SeByDocKy : Oui, il est sur la gauche. Sur de petites séries, je suppose que le montage est très artisanal, d’où la possibilité d’avoir des appareils « différents » 😉
Du coup tu as l’horizon qui bug 🙂 « No free lunch » 🙂
Le petit récepteur flysky à une très forte tendance à chopper les interférences venant des ESC, des FC, etc etc.
Un blindage à base de papier alu recouvert d’une gaine thermo peut aussi être la solution au problème.
(Ce qui permet, si ça rentre, de le laisser dans son logement bien pratique)
Pour info
Solution pour la dérive progressive
Soft mount les moteurs avec du silicone
Soft mount la carte de vole avec des O ring en caoutchouc (voir montage du loki x2)
Si il continue à dériver et bien c est rapé …
Pour l antenne, récupérer une antenne baton en 5,8 ghz et l adapter sur l emeteur, les resultats son satisfaisant (vu sur youtube)
Quand je dis adapter l antenne baton 5,8 ghz, il faut l ouvrir et prendre l antenne à l interieur la couper et souder au bons endroit
@ AURELIEN : Merci pour les suggestions.
A vrai dire, cet appareil n’est pas trop fait pour des vols stabilisés, il ne peut s’exprimer qu’zn acro. Dans ce cas, tout va bien, pas de dérive…
@ AURELIEN : Pour l’antenne, oui, on avait fait un tuto sur le sujet ici : https://youtu.be/0aZJlGJw5NI
Oui fred tout à fait !
Par contre je pense qu il est bien de réduire au maximum les vibrations meme en acro.
Johnny fpv (pour les connaisseurs) explique tout le bien qu apporte de soft mounted les moteurs.
Il a plus de souplesses, moins de vibrations.
Bon … nous sommes des débutant comparé aux pro du freestyle mais si ça peut nous apporter un plus pourquoi s en priver ?
En plus sur banggood ou autre ils ont commencé à vendre des pad en silicone adaptés aux différente taille de moteur et ces pad sont régulièrement hors stock.
Un ami a un torrent 110 qui dérive fortement apres un long vole, il a l habitude de passer en stabilisé pour atterir.
Je lui ai conseillé de soft mount ses moteurs et d ajouter des joints en caoutchouc pour le support de carte.
Et il a completement reglé le probleme de dérive.
Sebydocky m avait conseillé cette technique pour un drone chinois tres mal fichu (ca n a pas marché car il etait vraiment fait avec les pieds).
En tout cas bon test comme d habitude ?
Ha désolé fred … oups … moi j avais vu une video americaine.
Les meme sur youtube qui utilise un radar pour savoir à combien vole les drones.
Je sais pas si vous avez déja vu mais c est marrant ….
Un lizard 95 va plus vite qu un wizard 220 ???
https://youtu.be/5arA20hHeV4
120 kmh pour le lizard 95 ?
Petite question : pourquoi les radio ( exemple : flysky fs i6) sont si souvent vendue avec un récepteur car je n’en ai pas besoin je pense si je prends un eachine e010s ? J’ai trouvé sur banggood une version sans récepteur, mais il n’a pas l’air d’être le plus vendu.