The Omnicopter
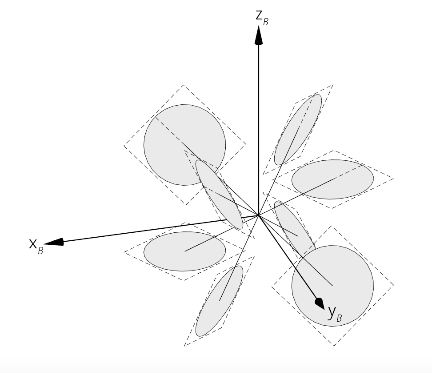
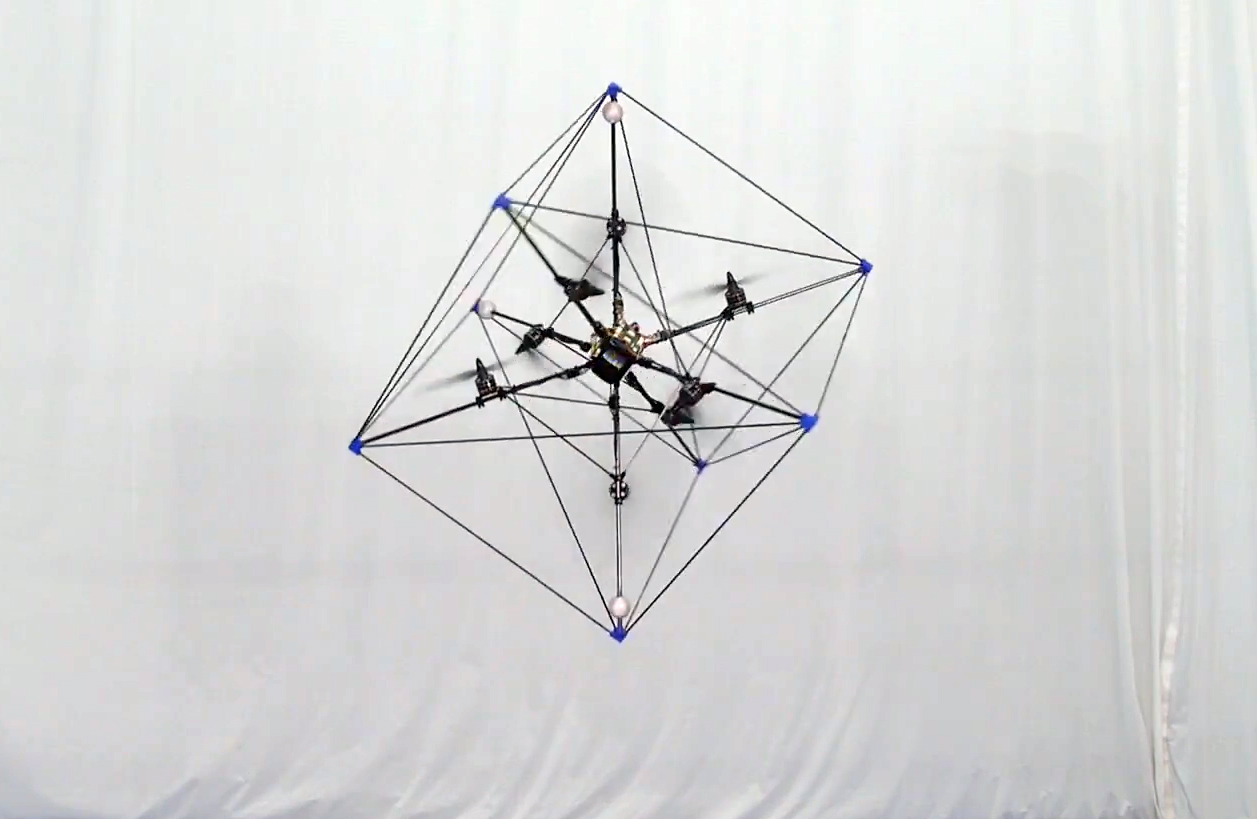 Voici une nouvelle expérimentation menée par l’ETH de Zürich, dans le laboratoire Institute for Dynamic Systems and Control dirigé Raffaello D’Andrea. Partant du constat que les multirotors classiques prennent de l’inclinaison lorsqu’ils se déplacent, Dario Brescianini et Raffaello D’Angela ont imaginé un appareil équipé de 8 rotors qui exercent des forces dans plusieurs directions. En modifiant la puissance et direction des rotors, les deux chercheurs sont parvenus à un engin capable de voler dans toutes les directions sans s’incliner. Ou en s’inclinant à volonté. Ce prototype pourrait permettre des vols avec des emports de charge jusqu’alors impossibles à gérer.
Voici une nouvelle expérimentation menée par l’ETH de Zürich, dans le laboratoire Institute for Dynamic Systems and Control dirigé Raffaello D’Andrea. Partant du constat que les multirotors classiques prennent de l’inclinaison lorsqu’ils se déplacent, Dario Brescianini et Raffaello D’Angela ont imaginé un appareil équipé de 8 rotors qui exercent des forces dans plusieurs directions. En modifiant la puissance et direction des rotors, les deux chercheurs sont parvenus à un engin capable de voler dans toutes les directions sans s’incliner. Ou en s’inclinant à volonté. Ce prototype pourrait permettre des vols avec des emports de charge jusqu’alors impossibles à gérer.
Les caractéristiques du prototype
 Sa taille est de 45 x 45 x 45 cm pour un poids de 886 grammes. Le cœur de l’ppareil est un processeur Cortex M4F. Les moteurs sont des MRM Titan 2208-1100 pilotés par des ESC DYS SN20A, avec des hélices Graupner 3D (pour l’inversion du sens de rotation) 8045. La batterie est une Thunder Power TP1800-4SM70. La vidéo permet de mieux comprendre l’intérêt de ce prototype. Si le sujet vous intéresse, cet article permet d’aller un peu plus dans les détails.
Sa taille est de 45 x 45 x 45 cm pour un poids de 886 grammes. Le cœur de l’ppareil est un processeur Cortex M4F. Les moteurs sont des MRM Titan 2208-1100 pilotés par des ESC DYS SN20A, avec des hélices Graupner 3D (pour l’inversion du sens de rotation) 8045. La batterie est une Thunder Power TP1800-4SM70. La vidéo permet de mieux comprendre l’intérêt de ce prototype. Si le sujet vous intéresse, cet article permet d’aller un peu plus dans les détails.

Bonjour à tous,
Techniquement c’est énorme 🙂
Je ne voie pas vraiment l’intérêt toutes fois.
Excellent, ça doit pas mal changer les algo par rapport à des moteur tous dans le plan!!
Et j’adrore les drones constructeurs!
@Pierro : pour transporter un verre de bière evidemment!
L’intérêt est que le design donne des possibilités de mouvements holonomes: 3 rotations et 3 translations pures, donc 6 degrés de liberté.
bonjour à tous
il en parle de la perte énorme d’énergie ? en termes de rendement les moteurs luttent les uns contre les autres