MUWA, le quadricoptère tout-terrain
 L’IROS 2013 est un événement qui se tient tous les ans depuis 1988, souvent au Japon, mais aussi dans des villes du monde entier. En 2008, il se tenait à Nice ! IROS signifie International « Conference On Intelligent Robots and Systems ». Des projets impressionnants y sont dévoilés. Cette année, entre autres découvertes, on pouvait y voir un prototype opérationnel du MUWA. Encore un acronyme ! Celui-ci signifie « Multi-field Universal Wheel for Air-land vehicle ». Et, semble-t-il, « anneau de rêve » en japonais… Le tout décrit bien cet engin, un quadricoptère doté d’une protection circulaire en mousse. On le doit à Koji Kawasaki, Moju Zhao, Kei Okada, et Masayuki Inaba de l’université de Tokyo.
L’IROS 2013 est un événement qui se tient tous les ans depuis 1988, souvent au Japon, mais aussi dans des villes du monde entier. En 2008, il se tenait à Nice ! IROS signifie International « Conference On Intelligent Robots and Systems ». Des projets impressionnants y sont dévoilés. Cette année, entre autres découvertes, on pouvait y voir un prototype opérationnel du MUWA. Encore un acronyme ! Celui-ci signifie « Multi-field Universal Wheel for Air-land vehicle ». Et, semble-t-il, « anneau de rêve » en japonais… Le tout décrit bien cet engin, un quadricoptère doté d’une protection circulaire en mousse. On le doit à Koji Kawasaki, Moju Zhao, Kei Okada, et Masayuki Inaba de l’université de Tokyo.
Tout-terrain ?
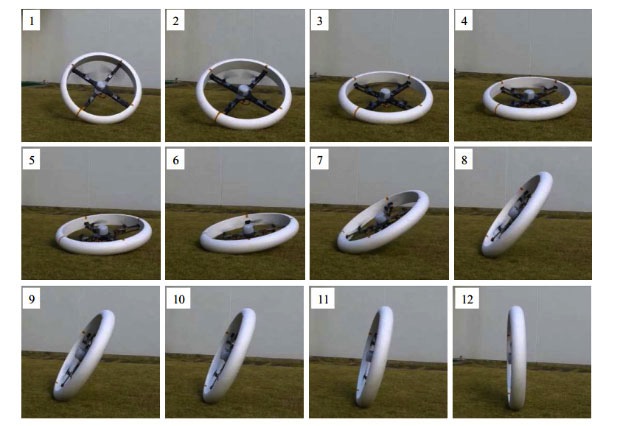 Le MUWA vole comme un quadricoptère classique. Son anneau de mousse lui évite de tomber lorsqu’il entre en contact avec des obstacles. Mais son secret réside dans ses hélices à pas variable. Oui, comme les hélicoptères destinés aux vols en 3D, ou le fameux quadricoptère Stingray ! A quoi ça sert ? A obtenir une poussée classique pour voler, mais aussi dans la direction opposée (vers le bas). Le coup de génie des concepteurs du MUWA, c’est de permettre à l’engin de se positionner à la verticale, comme une roue. En jouant avec la poussée normale et la poussée inversée, il est capable de se maintenir à la verticale sans tomber et de rouler, de tourner avec un angle… même à l’arrêt !
Le MUWA vole comme un quadricoptère classique. Son anneau de mousse lui évite de tomber lorsqu’il entre en contact avec des obstacles. Mais son secret réside dans ses hélices à pas variable. Oui, comme les hélicoptères destinés aux vols en 3D, ou le fameux quadricoptère Stingray ! A quoi ça sert ? A obtenir une poussée classique pour voler, mais aussi dans la direction opposée (vers le bas). Le coup de génie des concepteurs du MUWA, c’est de permettre à l’engin de se positionner à la verticale, comme une roue. En jouant avec la poussée normale et la poussée inversée, il est capable de se maintenir à la verticale sans tomber et de rouler, de tourner avec un angle… même à l’arrêt !
Rouler, c’est bien, mais pour quoi faire ?
Les responsables du MUWA assurent que le roulage en position verticale est bien moins gourmand en énergie que le vol classique. Qui plus est, la position verticale permet de passer des obstacles étroits. On imagine l’intérêt de cette particularité pour explorer des bâtiments, des combles, des ruines, à distance. Le MUWA, selon ses concepteurs, peut être équipé d’un capteur de type Kinect pour établir automatiquement un relevé 3D de son environnement. La prochaine génération de MUWA pourra également amerrir, c’est-à-dire se poser sur l’eau et redécoller, avec l’aide d’une seconde protection faisant office de bouée.
Le site officiel de l’université de Tokyo se trouve ici.
Source : le Dronologue


Certainement un bon ventillo pour pays chaud 🙂
Ca doit etre compliqué a gérer par contre.