Nocomp : comment vérifier la santé de moteurs brushless ?
 Hervé Pellarin, alias Nocomp, propose une méthode pour vérifier l’état de vos moteurs brushless. Le principe ? Plutôt que de les utiliser de manière classique pour entrainer une hélice, il retourne la situation pour générer de l’énergie plutôt qu’en consommer.
Hervé Pellarin, alias Nocomp, propose une méthode pour vérifier l’état de vos moteurs brushless. Le principe ? Plutôt que de les utiliser de manière classique pour entrainer une hélice, il retourne la situation pour générer de l’énergie plutôt qu’en consommer.
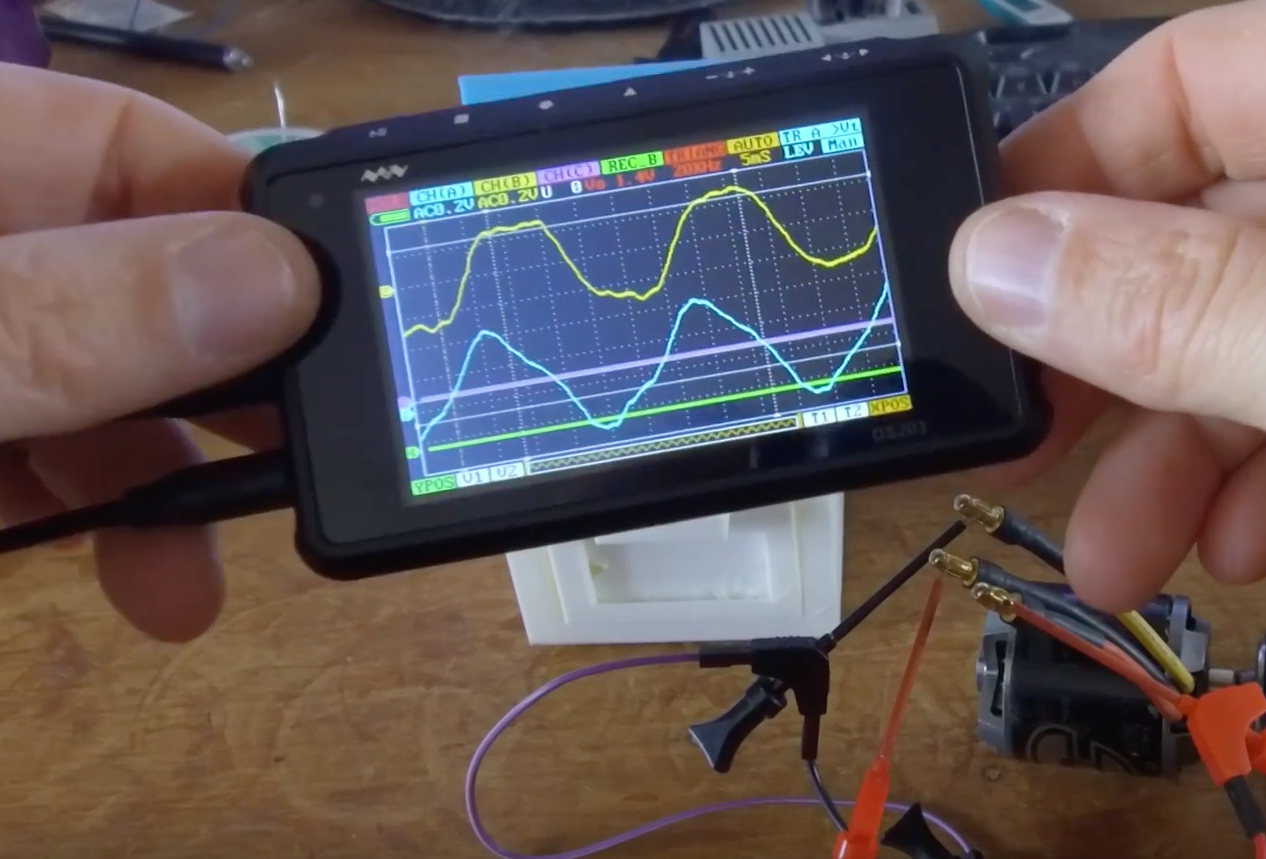
Aussitôt oscillo !
Le résultat est visible sur un oscilloscope – celui qu’utilise Hervé est le Mini Nano DSO203 de Banggood. Une méthode empirique ? Efficace ? Quelles sont les explications à ces observations ? A vous de le dire – moi je n’ai pas le niveau !

Bravo mon hervé ! Je me retrouve dans les cours d’electrotechnique….
Genial je vais de suite essayer ta methode , ça fait quelques annees que j’utiLise ce mini oscillo et c’est sur là c’est une tres bonne methode bien visuelle!!!
Son deuxième moteur doit vraiment être cramé pour générer des courbes pareilles ! Limite ça doit se voir à la couleur du bobinage qui a dû foncer.
En tout cas il a raison, a vide on doit avoir des belles sinusoïdes. Et il faut déconnecter le moteur de l’ESC pour cette vérification, l’ESC pouvant perturber le courant généré (pas forcément pratique pour contrôler son quad régulièrement).
En mesurant, l’inductance, on peut savoir directement ….. Le boitier coûte 10USD…
Presque simple… Et tout bêtement pas con 🙂
Merci Fred du partage et bravo @Nocomp pour ce tuto… sans colle chaude !
La back EMF est aussi utilisée par l’esc (haut de gamme) pour avoir un retour d’information sur sa vitesse de rotation par exemple(pour un asservissement en vitesse). Les quadri de DJI ou Parrot l’utilisent également pour un meilleur contrôle moteur.
J’ai plus simple comme méthode. Avant chaque vol je demande à mes moteurs si ça va : aucun ne répond mais comme dit le vieil adage « qui ne dit mot consent » … j’en déduis que tout va bien et gaz !! 🙂 🙂
hello tout le monde,
merci bien pour vos commentaires, tu vois fred c était au final pas si con la réflexion!! je crois qu on a bouger d un cran l intelligence globale de mes videos :))
quand aux méthodes diverses et varier, j avoue avoir un faible pour celle de @ticamoi !
Ce qu’il faut savoir sur les moteurs BLDC c’est qu’il en a 2 type de bobinage:
la configuration en étoile (le fameux logo)
ou en delta (triangle) la mesure ne se fait alors pas avec le même branchement car il n’y a pas de point mileu.
(très utilisé en course car la résistance est plus faible donc le courant induit est plus haut et le kv aussi).
mais au final ça revient au même
désolé pour le double post
@SeByDocKy la mesure de l’inductance avec un RLC mètre ne donnera aucune information sur la qualité des aimants du moteur, mais seulement de l’inductance de 2 bobines en séries des moteurs à bobinage en étoile
@nocomp brillantissime !
https://www.youtube.com/watch?v=9YO1IbQQ1w4
@Phil… En mesurant les différences d’inductances entre pairs…. tu peux déduire effectivement si il y a un problème sur le bobinage. Ce genre de problèmes doivent représenter une part majoritaire des soucis avec un moteur brushless…. C’est déjà pas mal…. Je disais juste qu’en complément de la méthode de nocomp, on peut aussi utiliser un inductance-mètre qui coûte bien moins cher. Néamoins avec l’osicillo, c’est clair qu’on a une analyse plus fine en vue d’une réparation. Si c’est la détection binaire « marche/marche pas »….. la mesure de l’inductance est pas mal.
@tiptop: La back EMF est utilisé sur TOUS les ESC non pas pour mesurer la vitesse mais pour déterminer les instants precis de bascules d’alimentation des phases du moteur pour qu’il tourne (une bonne quarantaine de bascules pour un seul tour moteur…)
@aiRVB oui effectivement pour tous les ESC (je suis allé un peu vite). Mais je vois pas en quoi un asservissement en vitesse est opposé à ce que tu dis ? Quand je parle de vitesse, je parle de vitesse de rotation bien sûr, donc de la vitesse à laquelle tu vas basculer tes phases. Tu ne cherches pas à savoir dans quelle position ton moteur est (tu ne peux pas vraiment le savoir sur un brushless) mais plutôt si ton alternance de phase se fait bien et correspond à ta commande initiale (pour l’ajuster au besoin), donc tu vérifier bien une vitesse. Ce qui me semble rentré dans catégorie : asservissement en vitesse (à l’opposé d’un asservissement en position).
Après je peux me planter mais dans mon souvenir c’était le principe, si tu as des liens sur le sujet je suis preneur 😉
@tiptop: je maintiens, la back EMF est là pour indiquer la position d’une bobine par rapport à l’aimant. Une bobine sur les trois sert tour à tour de capteur de position. Comme l’ESC connait en permanence cette position, il connaît aussi la vitesse de rotation du moteur, il fait varier la vitesse en hachant la tension d’alimentation via le bas du H-Bridge.
Il faut une vitesse minimum pour qu’une back EMF soit suffisamment élevée pour être exploitable par l’ESC. L’ESC démarre donc le moteur sans vraiment avoir d’info de position ni de vitesse, mais cette partie du logiciel ne tourne que très peu de temps, une fois lancé le moteur génère des infos de position et l’asservissement entre en action.