Nano racer, le test
Intérieur ou extérieur ?
 L’appareil est prévu pour voler en extérieur, mais il ne faut pas trop de vent : il est si léger qu’il est vite entrainé, sans diposer de moteurs suffisamment puissants pour contrer les bourrasques. Le mode Angle stabilisé utilisé avec un peu de vent provoque de très fortes vibrations, trop pour piloter sereinement. L’autonomie est de 4 minutes et 15 secondes environ. On est habitué à cela quand on pilote des racers – il est indispensable de compenser la faible autonomie par des batteries supplémentaires. Le pilotage du Nano racer n’est pas particulièrement difficile, mais je ne recommande pas l’appareil aux débutants. Mieux vaut avoir une petite expérience de pilotage, notamment en immersion, pour vraiment en profiter.
L’appareil est prévu pour voler en extérieur, mais il ne faut pas trop de vent : il est si léger qu’il est vite entrainé, sans diposer de moteurs suffisamment puissants pour contrer les bourrasques. Le mode Angle stabilisé utilisé avec un peu de vent provoque de très fortes vibrations, trop pour piloter sereinement. L’autonomie est de 4 minutes et 15 secondes environ. On est habitué à cela quand on pilote des racers – il est indispensable de compenser la faible autonomie par des batteries supplémentaires. Le pilotage du Nano racer n’est pas particulièrement difficile, mais je ne recommande pas l’appareil aux débutants. Mieux vaut avoir une petite expérience de pilotage, notamment en immersion, pour vraiment en profiter.
J’en veux un !
 Les Nano racers ont été proposés en exclusivité sur Kiss Kiss Bank Bank sous la forme d’un financement participatif. En théorie, il n’y en a plus de disponible. Mais dans la pratique, il reste quelques exemplaires que vous pouvez obtenir en contactant l’équipe de Nano Racing via sa page Facebook (ici). Ensuite, les concepteurs proposeront de nouvelles versions et déclinaisons de l’appareil, qui seront cette fois proposées sur le site Nano Racing. Que peut-on attendre des prochains mois ? Charles Venayre de la Créathèque nous dressé une belle liste des améliorations prévues, parmi lesquelles une simplification des composants dans la machine, de leurs connexions, des LEDs, et surtout un logiciel qui permettra des réglages ultrasimples et le partage de profils, notamment avec la possibilité d’utiliser ceux de pilotes stars !
Les Nano racers ont été proposés en exclusivité sur Kiss Kiss Bank Bank sous la forme d’un financement participatif. En théorie, il n’y en a plus de disponible. Mais dans la pratique, il reste quelques exemplaires que vous pouvez obtenir en contactant l’équipe de Nano Racing via sa page Facebook (ici). Ensuite, les concepteurs proposeront de nouvelles versions et déclinaisons de l’appareil, qui seront cette fois proposées sur le site Nano Racing. Que peut-on attendre des prochains mois ? Charles Venayre de la Créathèque nous dressé une belle liste des améliorations prévues, parmi lesquelles une simplification des composants dans la machine, de leurs connexions, des LEDs, et surtout un logiciel qui permettra des réglages ultrasimples et le partage de profils, notamment avec la possibilité d’utiliser ceux de pilotes stars !
La concurrence ?
Et face aux concurrents apparus récemment ? Oubliez ceux de type Tiny Whoop, ce sont des appareils exclusivement d’intérieur. Mais les derniers-nés de Eachine et les contrôleurs de vol pour moteurs brushed récents constituent une sérieuse concurrence.  Il faudra que l’équipe de Nano Racing soit suffisamment rapide pour proposer des améliorations et des effets de gamme, ainsi que des outils logiciels qui fassent la différence. Ce que nous, chez Helicomicro, on aimerait voir amélioré ? Tout d’abord la puissance des moteurs, le principal défaut de l’appareil, peut-être en optant pour des modèles « insane » de Micro Motor Warehouse (ou d’autres concurrents à fort KV). Peut-être une version à 6 moteurs, plus pêchue, puisque le contrôleur de vol offre 6 connecteurs. Ajouter un beeper, même faible, pour espérer retrouver facilement l’appareil. Une portée du module Bluetooth un peu supérieure, aussi pour ne pas devoir batailler et patienter devant l’écran que la connexion se rétablisse pendant les réglages. Pour le reste ? Prendre les commandes du Nano racer est un petit bonheur !
Il faudra que l’équipe de Nano Racing soit suffisamment rapide pour proposer des améliorations et des effets de gamme, ainsi que des outils logiciels qui fassent la différence. Ce que nous, chez Helicomicro, on aimerait voir amélioré ? Tout d’abord la puissance des moteurs, le principal défaut de l’appareil, peut-être en optant pour des modèles « insane » de Micro Motor Warehouse (ou d’autres concurrents à fort KV). Peut-être une version à 6 moteurs, plus pêchue, puisque le contrôleur de vol offre 6 connecteurs. Ajouter un beeper, même faible, pour espérer retrouver facilement l’appareil. Une portée du module Bluetooth un peu supérieure, aussi pour ne pas devoir batailler et patienter devant l’écran que la connexion se rétablisse pendant les réglages. Pour le reste ? Prendre les commandes du Nano racer est un petit bonheur !
Une vidéo
D’autres photos











Salut à quelle série fr sky correspond le récepteur ?
Hello,
Petite coquille en début d’article, les batteries sont des 700 mAh, et non des 70 mAh.
Un peu surpris par le positionnement de la machine sinon… Il n’y a vraiment pas moyen de le faire voler en intérieur même en diminuant les rate ? Je voyais ça comme la finalité de la machine ! Parce qu’en extérieur, le quad est tout même proche en taille de petits modèles type 120 équipés en brushless qui envoient probablement bien plus…
@ TB250 : Oups, merci, corrigé 😉
Pour les vols en intérieur (s’entend en appart ou en maison)… Si, bien sûr, c’est possible, en adoucissant les réglages et en étant bon pilote 🙂 Mais ce n’est clairement pas le but. Pas de protections d’hélices, prévu pour avancer vite : ça se marie difficilement avec des vols indoor et les vols de précision. En gymnase, en revanche, pas de souci, c’est l’environnement absolument parfait ! Plus le gymnase est grand, plus on se fait plaisir 🙂
La différence avec un brushless, c’est la solidité. Les machines 120 n’aiment pas du tout les crashs à répétitions, sans parler des hélices. Avec le Nano racer, s’il est dans le bon sens, il redécolle quasiment à tous les coups…
@ Víctor : Je vais demander à la Créathèque, je n’en ai aucune idée. Ma Taranis est un ancien modèle (pas « Plus »).
@Victor : ce n’est pas un récepteur frsky mais une sorte de clone. Et comme tous les clones ça doit être un équivalent de la série D.
il vivre beaucoup en mode « Angle » .
pas de biper c’est rédhibitoire j’attendrai la v2 pour le binder avec ma DX6 V2 🙂
@ Fred :
Tu trouves les 120 fragiles ? De mon côté, un copain à le tarot 130, ça me semble increvable. Plus c’est petit moins il y a d’inertie et de casse en général. Sur mon shrieker 130, pourtant plus joufflu en comparaison du petit tarot, il est même rare que je casse une hélice, pourtant en quadripale hqprop… Les moteurs à charbon ont de plus une durée de vie assez limitée.
Ce qui me fait craindre le outdoor avec le nano racer, c’est également la puissance d’émission. 25mw sur mes bestioles suffisent amplement à condition de ne pas trop s’éloigner et de ne pas voler à plus de 3 ou 4. Mais 10mW, j’ai peur qu’il faille aller souvent à la pêche pour le retrouver en raison de coupures vidéos dès qu’il y a un obstacle…
Quoi qu’il en soit j’aimerai bien voir ce petit quad en vol !
@ TB250 : Oui, je les trouve fragile face à ce que j’ai fait subir au Nano. Un obstacle de face plein pot, c’est au mieux le passage sur l’établi pour un Tarot 120, au pire un changement de frame. Avec le Nano, il suffit de réassembler le puzzle et c’est reparti. Ca scotche, surtout quand on vient constater les dégâts avec la boule au ventre en se disant que cette fois, c’était le truc de trop. Depuis le test, j’ai explosé un autre support moteur avec une chute d’une vingtaine de mètres moteurs coupés sur le macadam, je me croyais en Airmode. Ca, ça été fatal à plusieurs de mes racers… sur de l’herbe ! J’ai collé, c’est reparti comme en 14. Bon, il est évident que je vais finir par lui faire du mal, mais pour l’instant c’est juste impressionnant…
Bien sur, les moteurs à charbon ont une durée de vie limitée. Mais leur prix est léger… Et des moteurs plus puissants risquent de durer encore moins longtemps. Cela dit, on m’a donné les moteurs 6mm de MMWH pour 50 vols, pas plus, et j’ai dépassé les 300 vols !
Pour les 10 mW, évidemment, ce n’est pas une machine pour aller faire de l’Urbex 😉 Les 10 mW portent loin, mais uniquement en terrain dégagé. En fait, je déconseille de voler hors vue directe (de l’observateur nécessaire rapport à la loi mais surtout) pour retrouver plus facilement – ou retrouver tout court – la bestiole en cas de souci.
J’ai reçu le mien lundi, mais pour l’instant il n’a pas encore volé : j’ai des difficultés pour le configurer pour ma Devo 7e sous Deviation (Protocole DSM). J’arrive à binder en DSM2 mais les valeurs affichées dans l’onglet « Receiver » de Betaflight Configurator sont aberrantes et les canaux désordonnés… Quelqu’un a de l’expérience là-dessus ?
J’ai aussi eu du mal à accrocher le signal Bluetooth, et lorsque c’est fait, c’est très lent sous Betaflight Configurator, comme indiqué par Fred (chez moi une page met facilement 40s à se charger tout de même !) Je soupçonne que l’antenne BT de mon portable ne soit pas à proximité de la led témoin, et donc que je doive chercher la position optimale du Nano autour de l’ordi… 😐
Y a pas de version de série à venir ? Dommage mais bon tant pis d’autant que je suis moins impressionné depuis que mes PID sont à peu près corrects sur mes micro quads à Scisky (le 360° avec un rate élevé passe pas trop mal désormais, en tout cas, ils ne perdent plus 5m en oscillant de tous cotés…)
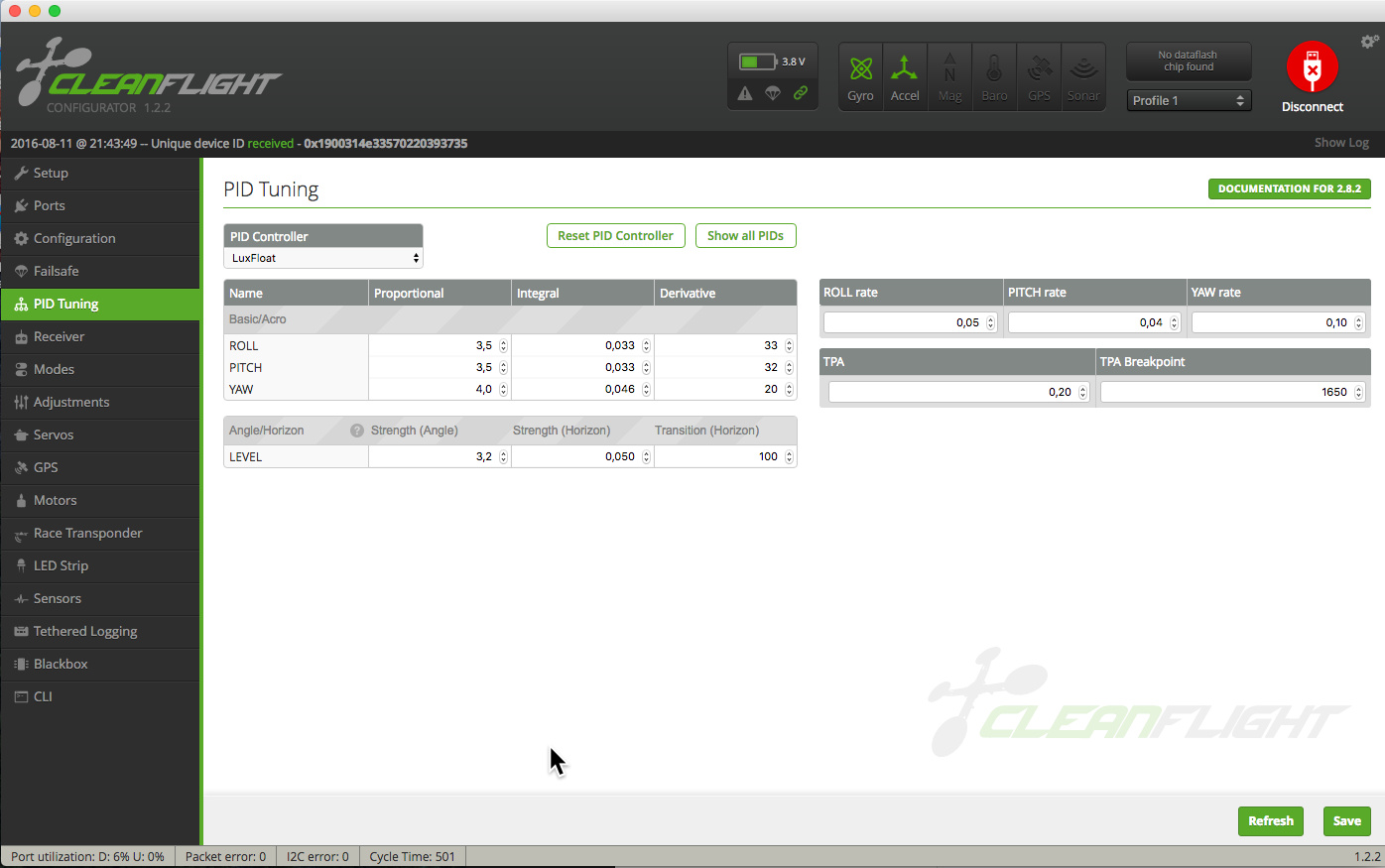
@Khan Je n’ai pas le Nano Racer. Par contre avec Cleanflight & Co avec TX sous Deviation, je vois 2 explications :
la radio en mode hélico avec ses mixages dédiés (solution : veiller à etre en model type « multi », avec mixer gui « advanced », par défaut les mixer des 4 voies de bases devraient être « simple ».
sous betaflight onglet « receiver », veiller à être en channel map TAER (JR/Spektrum/Graupner), il normalement est nécessaire d’inverser le sens de 2 voies (yaw et aileron) puis de régler les bornes de la radio via scale + et scale – pour que le minimum et le maximum de chaque voies coincident respectivement avec 1000 et 2000. Avant cela peut être faudra t’il subtrimer pour avoir les centres à 1500 (pas nécessaire avec une scisky et deviation)
@ Khan : Pour les canaux, j’ai du modifier l’ordre. L’avantage, c’est que je suis habitué à le faire, c’est ainsi à chaque fois que je binde un appareil avec ma Taranis, et ça arrive souvent 🙂 Pour les valeurs aberrantes, là, je ne sais pas…
@ Khan : Peut-être que ça a un rapport, je ne suis pas passé par Betaflight Configurator (qui m’a ruiné deux configurations sans doute parce que les versions de BF installées était trop anciennes), mais par Cleanflight Configurator…
@ Fred :
Pouah, tu n’y vas pas avec le dos de la cuillère !!! Mes racers, y compris (surtout) le 130, ont pris des gamelles invraisemblables en voltige, mais il est très rare que je casse une frame en carbone. Tu dois turbiner avec des config de fou furieux !
@Fred : En fait j’ai commencé par essayer avec Cleanflight Configurator (j’ai un autre quad configuré avec), car j’avais survolé la FAQ de Nano (pourtant je suis le premier à dire RTFM !). Mais chaque fois que je tentais la connexion, le FC s’éteignait ! Donc j’ai installé le Betaflight Configurator spécifique fourni par Nano, et là j’ai pu me connecter au FC.
@nog : Pour le profil Nano sur ma Devo, j’avais recopié le profil de mon quad qui utilise aussi un satellite spektrum et un firmware Cleanflight. J’espérais donc ne pas avoir a réorganiser les voies, et très peu de modifs à faire sur les bornes de la radio pour obtenir le mini 1000 et maxi 2000…
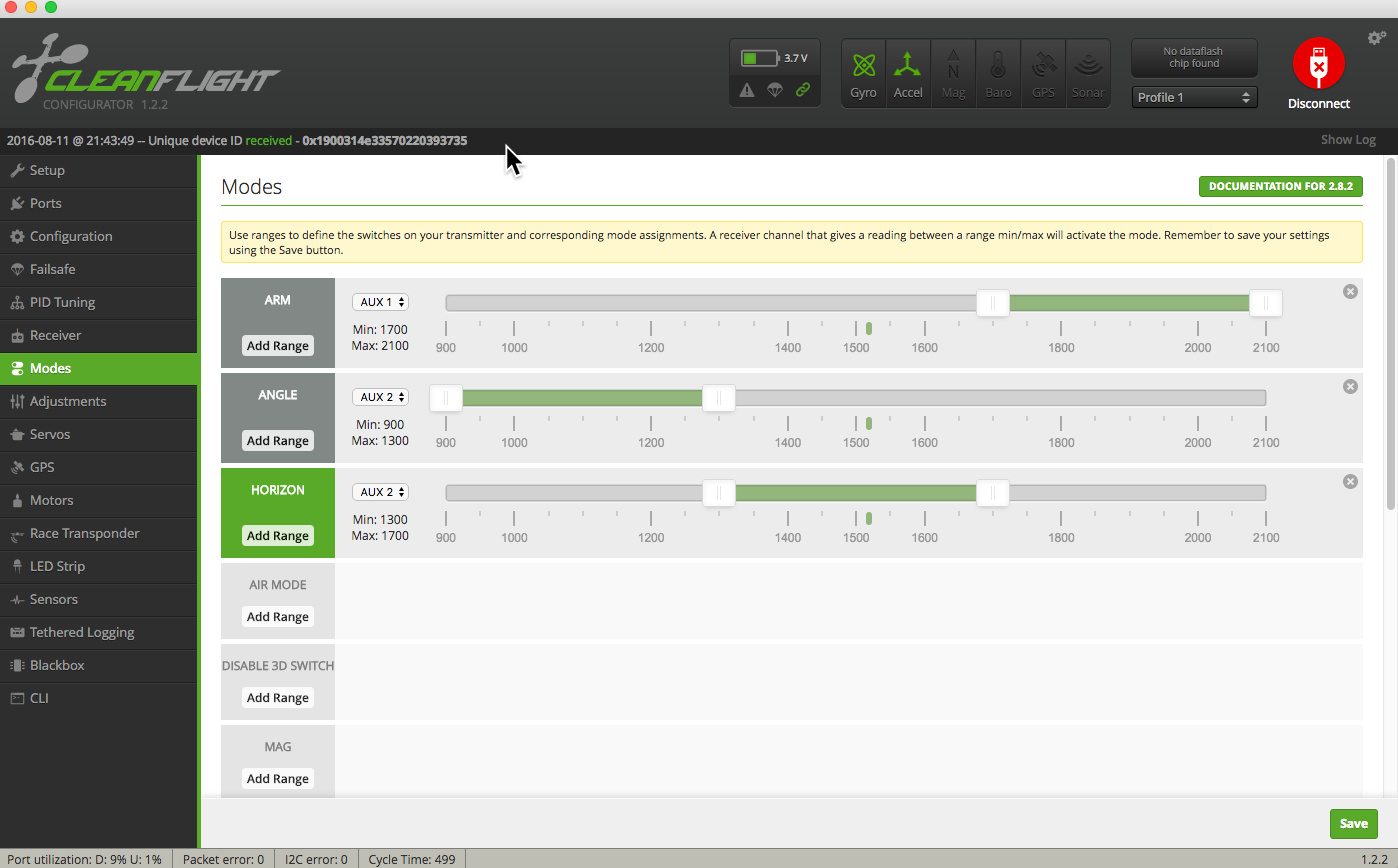
La j’ai vraiment des choses étranges, genre le AUX1 sur le Tx qui arrive en Rudder sur le Rx et avec des plages de ~1050mini à 1700maxi…
Je vais retenter l’appairage en modifiant la valeur « spektrum_sat_bind » et je posterai mes avancées ici si ça peut aider qqn 🙂
Ca y est il a volé ! (De nuit dans le jardin… au moins en cas de perte, à travers la canopy blanche les leds aident à le repérer) 😀
En fait, il faut s’assurer qu’a l’onglet Configuration, dans la boite « Serial Receiver Provider », on soit bien en SPEKTRUM1024. Ensuite avec la commande CLI « rx_spektrum_bind » l’appairage se fait avec le Tx en DSM2. Ce qui est déroutant, c’est que le satellite (un OrangeRx RX110X) continue à clignoter, alors que sa doc dit qu’il devrait passé en allumé fixe. Avec ça, je reçois 7 voies dans le bon ordre, les bonnes valeurs, tout nickel.
J’ai également constaté qu’en positionnant le Nano à gauche de mon portable (alors que le switch et la led témoin du Bluetooth sont devant à droite), la connexion est bien plus stable et rapide que précédemment.
@Fred : j’ai tenté de les contacter (j’ai créé pour le première fois un compte fb !!!) pour voir s’il y avait possibilité de s’en procurer un, ben pas de réponse 🙁 ! Je crois qu’il va falloir attendre les ventes via le site maintenant?
Mes impressions après avoir vidé quelques LiPos :
– Les connecteurs moteurs se déconnectent facilement, et parfois, même remis correctement en place, n’assurent plus le contact. Je ne reconnais pas le type de connecteurs, mais je ne suis pas sûr qu’ils soient conçus pour des démontages/remontages multiples.
Sur mon Nano j’ai du trouver une solution à base de micro-cales en mousse et de duct-tape… 😐
– J’ai testé avec des LiPos Nano-Tech en 35C (Attention à la polarité du connecteur !), et le comportement en vol est amélioré avec des remises de gaz plus franches. Par contre la batterie (750mAh) est un rien trop grosse pour le logement : on ne peut pas l’enfoncer a fond, la batterie bloque contre le connecteur sous la carte mere… va falloir que je modde le chassis !
Bonjour,
J’essaie de contacter le support nano depuis plusieurs semaines. Silence radio.
Le site nano-racing.com est HS.
Ils ont abandonné le projet ? et leur clients avec ?
Bonjour,
Meme soucis que toi Marko33, je les ai contacté mi mai pour un soucis de puissance moteur après qqs vols, on m’a proposé de m’en renvoyer 4, j’en avais profité pour commander qqs lipos histoire de faire marcher leur business, j’ai réglé et depuis plus de nouvelle, ça ne répond plus, que ce soit sur FB ou sur leurs adresses mail.
A mon avis ça sent pas bon.
Une idée de moteurs qui pourraient faire l’affaire ? et les connecteurs où les trouver ?