uAvionix et l’ADS-B

Le croisement entre le trafic aérien habité et les drones donne des sueurs froides aux responsables en charge de l’espace au-dessus de nos têtes. Les épisodes des confrontations entre Airbus et drones (et sacs-poubelle) en sont l’illustration. Le « sense and avoid » (détecter et éviter) des avions habités repose en partie sur l’usage des transpondeurs. Pour faire simple, ce sont des balises qui indiquent la position de chaque aéronef, à destination des autres aéronefs, ainsi que des responsables du trafic au sol. Ce sont des appareils que l’on embarque facilement à bord d’un avion ou d’un hélicoptère, mais ils sont gros, assez lourds, chers, et gourmands en énergie pour les engins plus petits comme les ULM, les planeurs, et bien sur les appareils radiocommandés. Mais cela va changer, avec la miniaturisation des transpondeurs.
pingRX
 Dans un premier temps, nous allons voir apparaître des récepteurs (Rx) basés sur la technologie ADS-B (Automatic Dependant Surveillance – Broadcast). Le but ? Détecter les appareils dotés de transpondeurs qui évoluent à proximité, ce qui permet de gérer la partie « détecter ». La partie « éviter » est alors confiée soit au pilote du drone, soit au contrôleur de vol. Soit une combinaison des deux.
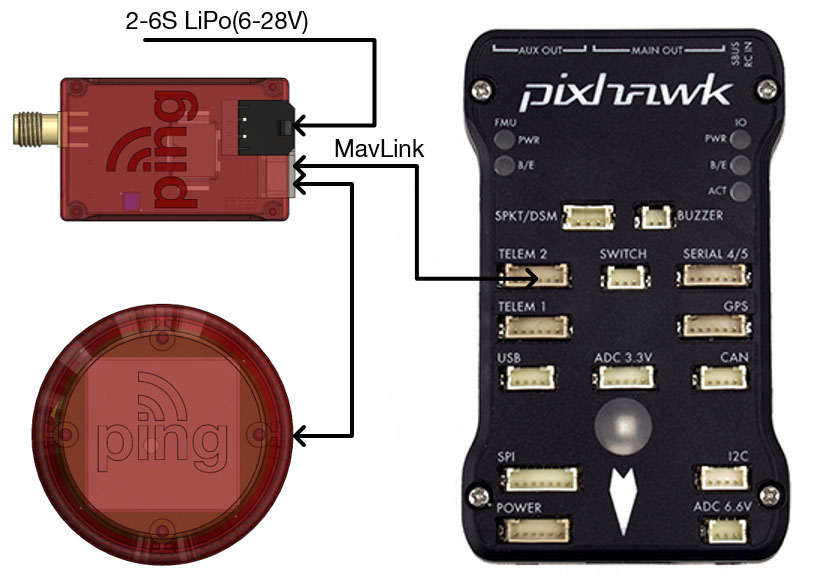
Dans un premier temps, nous allons voir apparaître des récepteurs (Rx) basés sur la technologie ADS-B (Automatic Dependant Surveillance – Broadcast). Le but ? Détecter les appareils dotés de transpondeurs qui évoluent à proximité, ce qui permet de gérer la partie « détecter ». La partie « éviter » est alors confiée soit au pilote du drone, soit au contrôleur de vol. Soit une combinaison des deux. 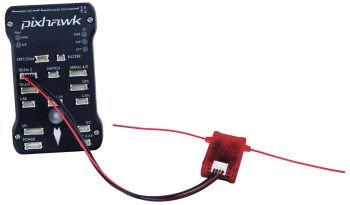 L’un des premiers Rx ADS-B de petite taille est le pingRX de uAvionix, un accessoire qui peut en théorie être placé sur la plupart des appareils volants. Il ne mesure que 3 x 1,5 x 0,3 cm pour un poids de 1,5 gramme, avec une double antenne souple, et une alimentation en 4 à 6V. Il est prévu pour être directement interfacé avec le protocole MAVlink pour une intégration avec l’autopilote du contrôleur de vol Pixhawk et APM Mission Planner.
L’un des premiers Rx ADS-B de petite taille est le pingRX de uAvionix, un accessoire qui peut en théorie être placé sur la plupart des appareils volants. Il ne mesure que 3 x 1,5 x 0,3 cm pour un poids de 1,5 gramme, avec une double antenne souple, et une alimentation en 4 à 6V. Il est prévu pour être directement interfacé avec le protocole MAVlink pour une intégration avec l’autopilote du contrôleur de vol Pixhawk et APM Mission Planner.
En pratique ?
Il suffit d’enficher sa prise dans le connecteur Telem 2 du Pixhawk. Il faut aussi un accessoire compatible avec la télémétrie de 3Drobotics pour recevoir les données à distance, sur la Ground Station.  Les aéronefs équipés de l’ADS-B, dans un rayon qui peut atteindre 160 km, apparaissent alors sur la carte de la Ground Station, à la manière d’un radar. C’est à l’opérateur du drone d’agir s’il constate qu’un appareil risque de croiser sa trajectoire. Mais on peut imaginer de futures solutions automatisées qui prennent le contrôle du drone pour le placer hors de trajectoire. Notez qu’il existe aussi une version USB du récepteur ADS-B, appelée pingUSB. Elle peut être utilisée avec des logiciels spécialisés, comme Virtual Radar Server. Les versions pingRX et pingUSB fonctionnent en dual band, en 1090 et 978 MHz.
Les aéronefs équipés de l’ADS-B, dans un rayon qui peut atteindre 160 km, apparaissent alors sur la carte de la Ground Station, à la manière d’un radar. C’est à l’opérateur du drone d’agir s’il constate qu’un appareil risque de croiser sa trajectoire. Mais on peut imaginer de futures solutions automatisées qui prennent le contrôle du drone pour le placer hors de trajectoire. Notez qu’il existe aussi une version USB du récepteur ADS-B, appelée pingUSB. Elle peut être utilisée avec des logiciels spécialisés, comme Virtual Radar Server. Les versions pingRX et pingUSB fonctionnent en dual band, en 1090 et 978 MHz.
Et en émission ?
 La solution pingRX permet en théorie à un multirotor de détecter et d’éviter les aéronefs qui croisent sa trajectoire. Mais ces aéronefs n’ont aucune conscience de la présence du multirotor, puisque le pingRX ne fait que recevoir des informations, il n’émet rien. A vrai dire, ce n’est pas plus mal. Imaginons que chaque multirotor se mette à indiquer sa position à l’allumage dès sa position GPS acquise. Ce serait un chaos immense qui sèmerait la panique chez les contrôleurs aériens et, surtout, dans les logiciels de régulation automatisée du trafic. Mais il est sans doute envisagé de créer un réseau parallèle réservé aux drones, qui ne communiquerait ses informations aux usagers habituels de l’ADS-B qu’en cas de danger. Sachez que uAvionix travaille déjà sur un outil destiné à équiper les multirotors de petite taille (probablement de 1 kilo et plus), le ping2020. Il ne mesure que 2,5 x 3,9 x 1,2 cm pour 20 grammes, à alimenter en 6 à 29V. Il faut lui ajouter une tête GPS, le pingNav : 4,2 x 2,2 cm pour 30 grammes, en 5V. Il est compatible GPS, Glonass, Galileo et BeiDou 3 pour optimiser la précision et la vitesse d’acquisition des signaux satellite. Les deux sont aussi prêts à être branchés sur un Pixhawk ! On imagine que uAvionix travaille sur l’intégration de ses équipements avec d’autres contrôleurs de vol que le Pixhawk, en collaboration avec leurs constructeurs (comme DJI).
La solution pingRX permet en théorie à un multirotor de détecter et d’éviter les aéronefs qui croisent sa trajectoire. Mais ces aéronefs n’ont aucune conscience de la présence du multirotor, puisque le pingRX ne fait que recevoir des informations, il n’émet rien. A vrai dire, ce n’est pas plus mal. Imaginons que chaque multirotor se mette à indiquer sa position à l’allumage dès sa position GPS acquise. Ce serait un chaos immense qui sèmerait la panique chez les contrôleurs aériens et, surtout, dans les logiciels de régulation automatisée du trafic. Mais il est sans doute envisagé de créer un réseau parallèle réservé aux drones, qui ne communiquerait ses informations aux usagers habituels de l’ADS-B qu’en cas de danger. Sachez que uAvionix travaille déjà sur un outil destiné à équiper les multirotors de petite taille (probablement de 1 kilo et plus), le ping2020. Il ne mesure que 2,5 x 3,9 x 1,2 cm pour 20 grammes, à alimenter en 6 à 29V. Il faut lui ajouter une tête GPS, le pingNav : 4,2 x 2,2 cm pour 30 grammes, en 5V. Il est compatible GPS, Glonass, Galileo et BeiDou 3 pour optimiser la précision et la vitesse d’acquisition des signaux satellite. Les deux sont aussi prêts à être branchés sur un Pixhawk ! On imagine que uAvionix travaille sur l’intégration de ses équipements avec d’autres contrôleurs de vol que le Pixhawk, en collaboration avec leurs constructeurs (comme DJI).
On va vraiment être équipés ?
 C’est probable. Même si le risque de collision entre un aéronef habité et un drone est encore faible, la multiplication du nombre d’engins en vol augmente mathématiquement les risques. Les autorités sont déjà en train de plancher sur une réglementation pour surveiller les vols, notamment pour éviter les survols illégaux – et les outils comme ceux de uAvionix correspondent à leurs besoins. Il est intéressant de pouvoir réfléchir à des solutions efficaces et au budget raisonnable avant que les faits-divers ne donnent un coup d’accélérateur – un accident ou la soudaine croisade d’un responsable politique en mal de combats. Il va donc falloir se faire à l’idée que, tôt ou tard, les appareils au-dessus d’une certaine masse – probablement 1 kilo – soient équipés d’un accessoire de type pingRX voire ping2020. Cela n’empêchera pas les incidents et les accidents puisqu’il sera toujours possible de décoller sans cet équipement, dans l’illégalité, mais il est probable que les risques soient diminués. Il faudra rester vigilant sur l’usage qui peut être fait de ces technologies laissant peu de place à la vie privée… Il faudra aussi être prudent, car si l’usage de transpondeurs permet d’éviter un aéronef, il permet aussi, en théorie, de venir volontairement à sa rencontre… Le site de uAvionics se trouve ici.
C’est probable. Même si le risque de collision entre un aéronef habité et un drone est encore faible, la multiplication du nombre d’engins en vol augmente mathématiquement les risques. Les autorités sont déjà en train de plancher sur une réglementation pour surveiller les vols, notamment pour éviter les survols illégaux – et les outils comme ceux de uAvionix correspondent à leurs besoins. Il est intéressant de pouvoir réfléchir à des solutions efficaces et au budget raisonnable avant que les faits-divers ne donnent un coup d’accélérateur – un accident ou la soudaine croisade d’un responsable politique en mal de combats. Il va donc falloir se faire à l’idée que, tôt ou tard, les appareils au-dessus d’une certaine masse – probablement 1 kilo – soient équipés d’un accessoire de type pingRX voire ping2020. Cela n’empêchera pas les incidents et les accidents puisqu’il sera toujours possible de décoller sans cet équipement, dans l’illégalité, mais il est probable que les risques soient diminués. Il faudra rester vigilant sur l’usage qui peut être fait de ces technologies laissant peu de place à la vie privée… Il faudra aussi être prudent, car si l’usage de transpondeurs permet d’éviter un aéronef, il permet aussi, en théorie, de venir volontairement à sa rencontre… Le site de uAvionics se trouve ici.
Crédits photos : uAvionix sauf photo Airbus D.R.


A supposer que seules les activités Pro soient concernées, je ne comprendrais pas pour autant une obligation de ce dispositif puisque cela n’apporte vraiment pas grand chose vis à vis de l’aviation légère / ultra légère … ou même commerciale…
Toutefois, l’idée a le mérite d’exister… et donc d’initier une législation qui irait dans le bon sens si tous les acteurs concernés acceptaient de se mettre autour de la table… et plus ça va, plus la table devrait être grande semble-t-il…
😉
On pourrait imaginer un système qui s’intègre à la radio-commande car elle sait où est le drone, pas besoin de transpondeur sur le multi, pour la transmission dans la base de donnée en live : pas de soucis, on a déjà tout : la carte SIM du téléphone…..et hop la solution est trouvée de suite sans ajout de matériel…incroyable…merci qui ? Moi. Loll.
@Titou : Il est peu probable que les autorités acceptent une solution où le transpondeur est dépendant d’une chaine de transmission, et/ou d’outils de téléphonie…
Mais tu peux tenter de faire la proposition 😉
@ DroneàRoulettes : Il est probable que le transpondeur serve plus à surveiller les vols illégaux que les éventualités de near-miss avec l’aviation grandeur…
@Fred:
on est bien d’accord !… Et plus il y a de monde à table, plus c’est la foire pour le choix du vin … 🙂