SP Racing F3
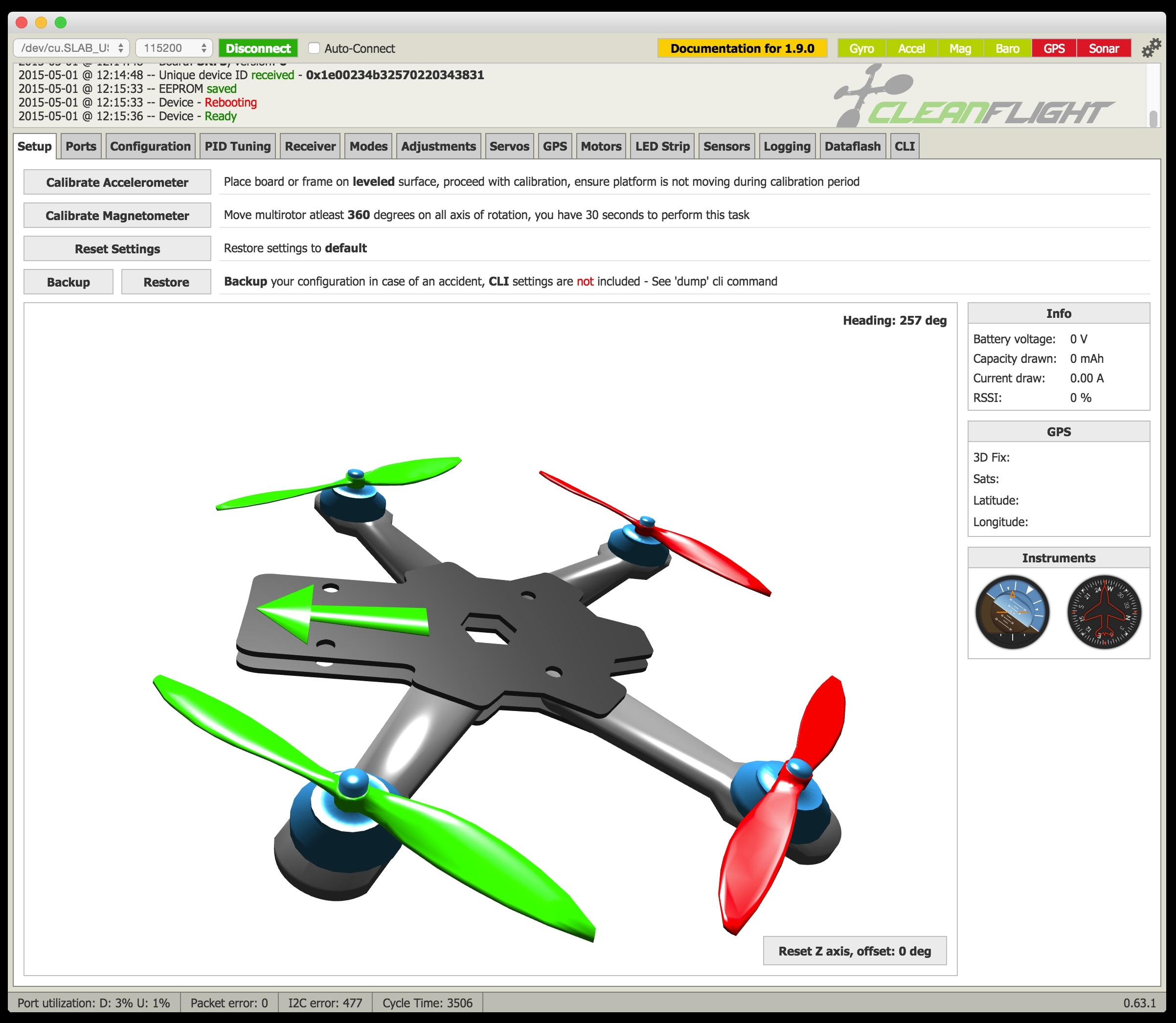
 Pour équiper les racers, deux familles de contrôleurs de vol se partagent le marché : ceux basés sur la Naze32 et ceux basés sur la CC3D. Il ne reste pas beaucoup de place pour les systèmes concurrents, comme les KK, Naza de DJI, les APM ou les contrôleurs de vol propriétaire comme le GR18 de Graupner. Une autre bataille fait rage, celle des outils logiciels qui équipent ces contrôleurs de vol. Il n’en reste que deux principaux, BaseFlight et CleanFlight, développés sous la forme d’un firmware pour le contrôleur de vol associé à une application pour le navigateur Chrome. CleanFlight est sans doute le plus en avance, mais les deux outils se talonnent…
Pour équiper les racers, deux familles de contrôleurs de vol se partagent le marché : ceux basés sur la Naze32 et ceux basés sur la CC3D. Il ne reste pas beaucoup de place pour les systèmes concurrents, comme les KK, Naza de DJI, les APM ou les contrôleurs de vol propriétaire comme le GR18 de Graupner. Une autre bataille fait rage, celle des outils logiciels qui équipent ces contrôleurs de vol. Il n’en reste que deux principaux, BaseFlight et CleanFlight, développés sous la forme d’un firmware pour le contrôleur de vol associé à une application pour le navigateur Chrome. CleanFlight est sans doute le plus en avance, mais les deux outils se talonnent…
Combat de codes
 D’un côté, il y a TimeCop, Hamasaki dans la vraie vie, un développeur japonais spécialiste du hardware MultiWii, créateur du contrôleur de vol Naze32. Il est basé sur un processeur ARM Cortex M3 STM32F303CB 32-bit de STMicroelectronics cadencé à 72 MHz en 3,3V avec 1 Mo de mémoire Flash. Il a aussi élaboré un portage d’un firmware MultiWii, appelé BaseFlight. De l’autre côté, il y a Hydra, un autre développeur, qui a proposé ses contributions pour BaseFlight. Hydra, Dominic Clifton dans le civil, avait l’intention de porter BaseFlight pour tous les types de contrôleurs de vol… Ce qui n’a pas été du goût de TimeCop. Hydra a donc décidé de lancer son propre firmware, qu’il a appelé CleanFlight – une petite pique pour indiquer que son code était « propre », à la différence de celui de TimeCop. Alors que BaseFlight ne fonctionne qu’avec la Naze32 et ses dérivés, CleanFlight est compatible avec la Naze32, mais aussi la CC3D (et encore d’autres contrôleurs de vol). L’étape suivante pour Dominic Clifton ? C’était de créer un contrôleur de vol concurrent de la Naze32. C’est chose faite avec le SP Racing F3…
D’un côté, il y a TimeCop, Hamasaki dans la vraie vie, un développeur japonais spécialiste du hardware MultiWii, créateur du contrôleur de vol Naze32. Il est basé sur un processeur ARM Cortex M3 STM32F303CB 32-bit de STMicroelectronics cadencé à 72 MHz en 3,3V avec 1 Mo de mémoire Flash. Il a aussi élaboré un portage d’un firmware MultiWii, appelé BaseFlight. De l’autre côté, il y a Hydra, un autre développeur, qui a proposé ses contributions pour BaseFlight. Hydra, Dominic Clifton dans le civil, avait l’intention de porter BaseFlight pour tous les types de contrôleurs de vol… Ce qui n’a pas été du goût de TimeCop. Hydra a donc décidé de lancer son propre firmware, qu’il a appelé CleanFlight – une petite pique pour indiquer que son code était « propre », à la différence de celui de TimeCop. Alors que BaseFlight ne fonctionne qu’avec la Naze32 et ses dérivés, CleanFlight est compatible avec la Naze32, mais aussi la CC3D (et encore d’autres contrôleurs de vol). L’étape suivante pour Dominic Clifton ? C’était de créer un contrôleur de vol concurrent de la Naze32. C’est chose faite avec le SP Racing F3…
Les caractéristiques
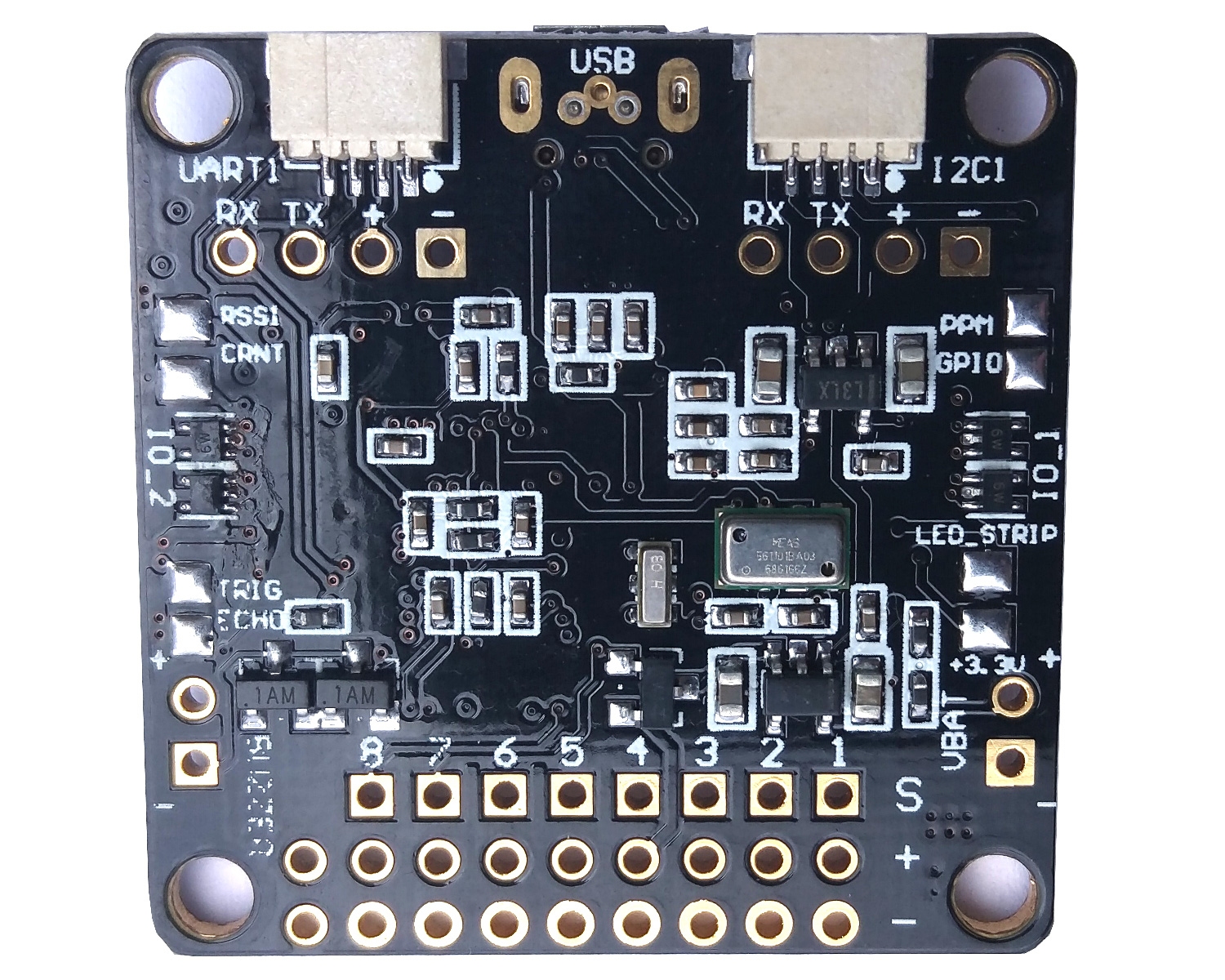
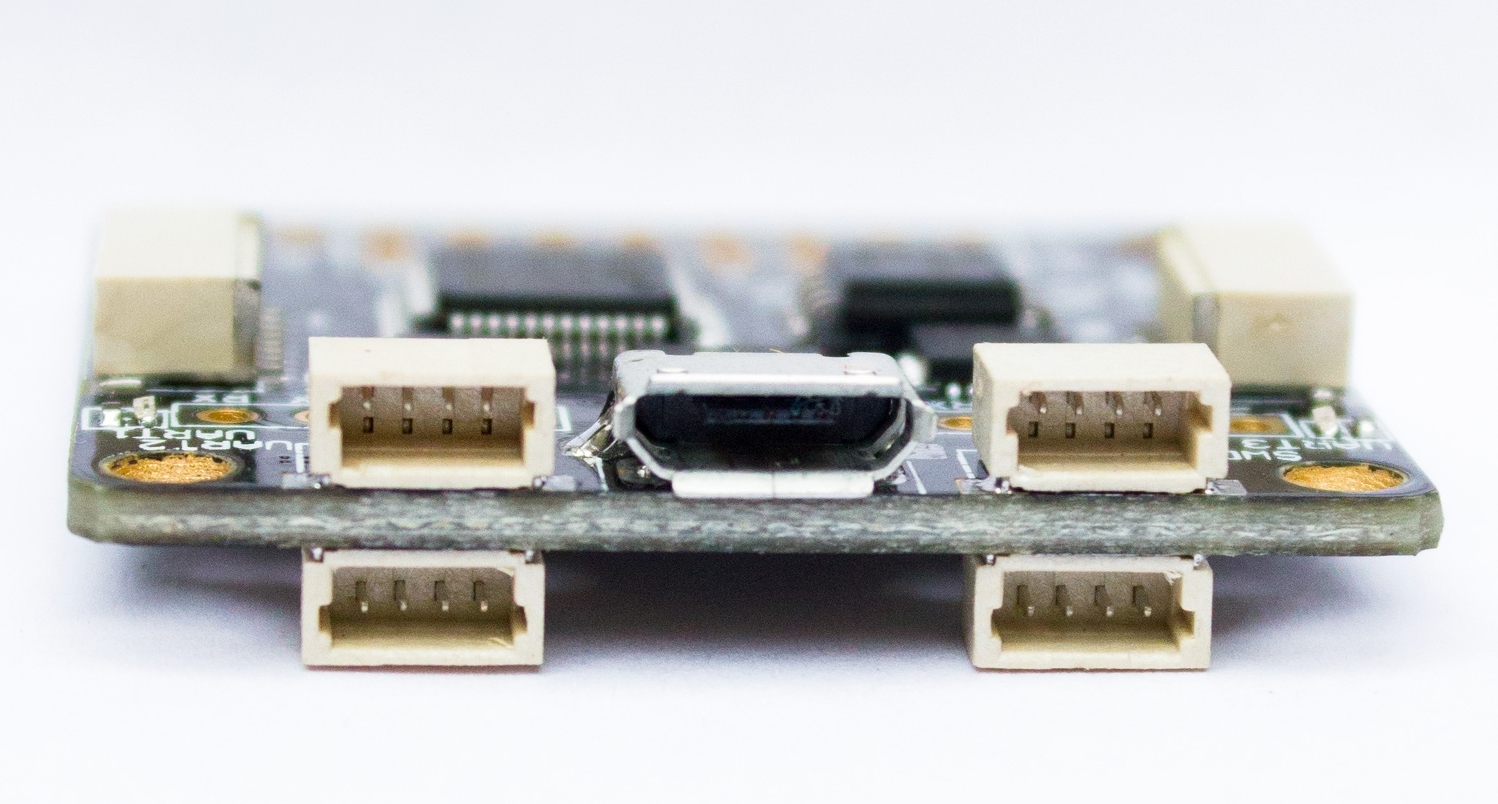
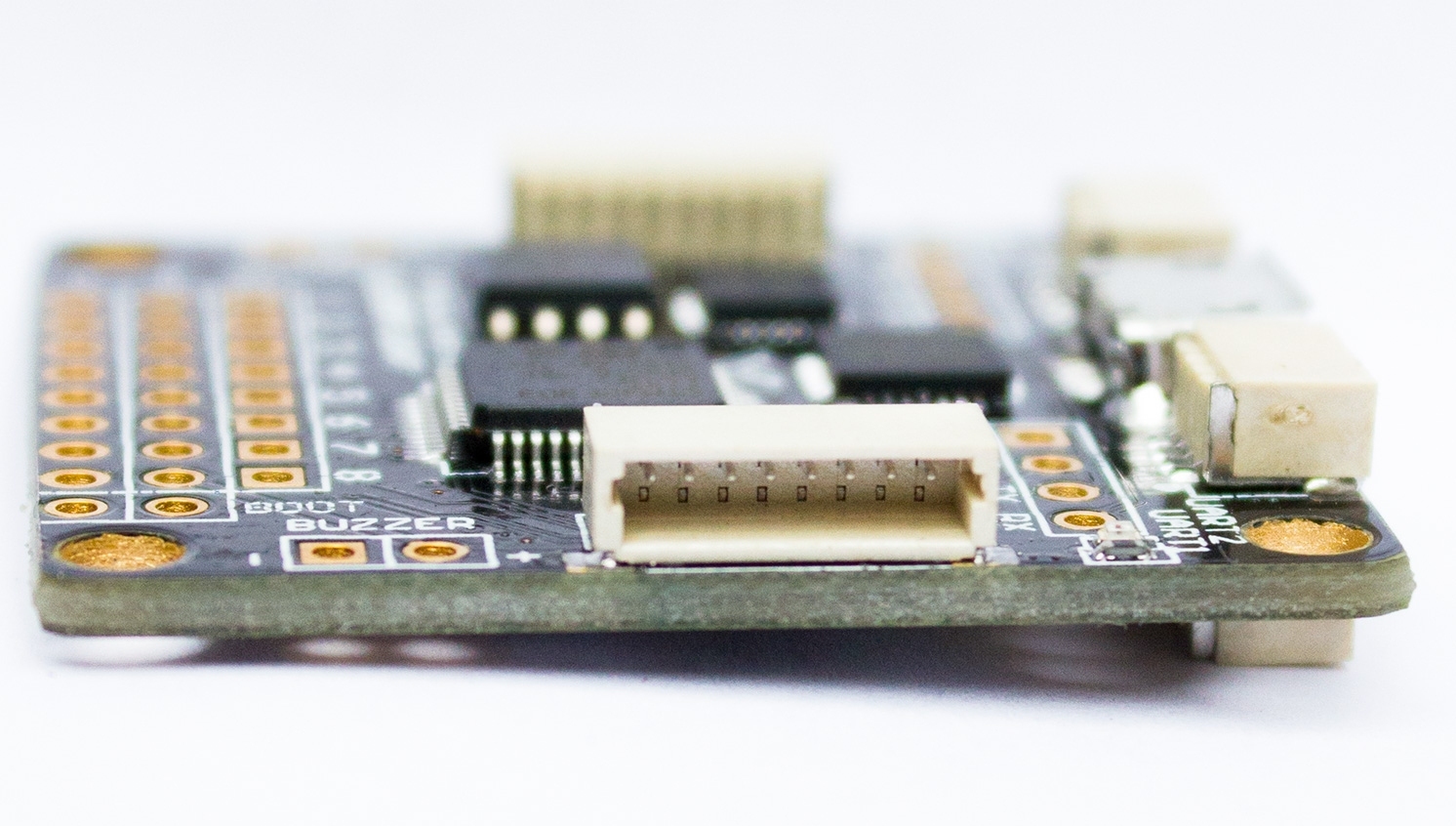
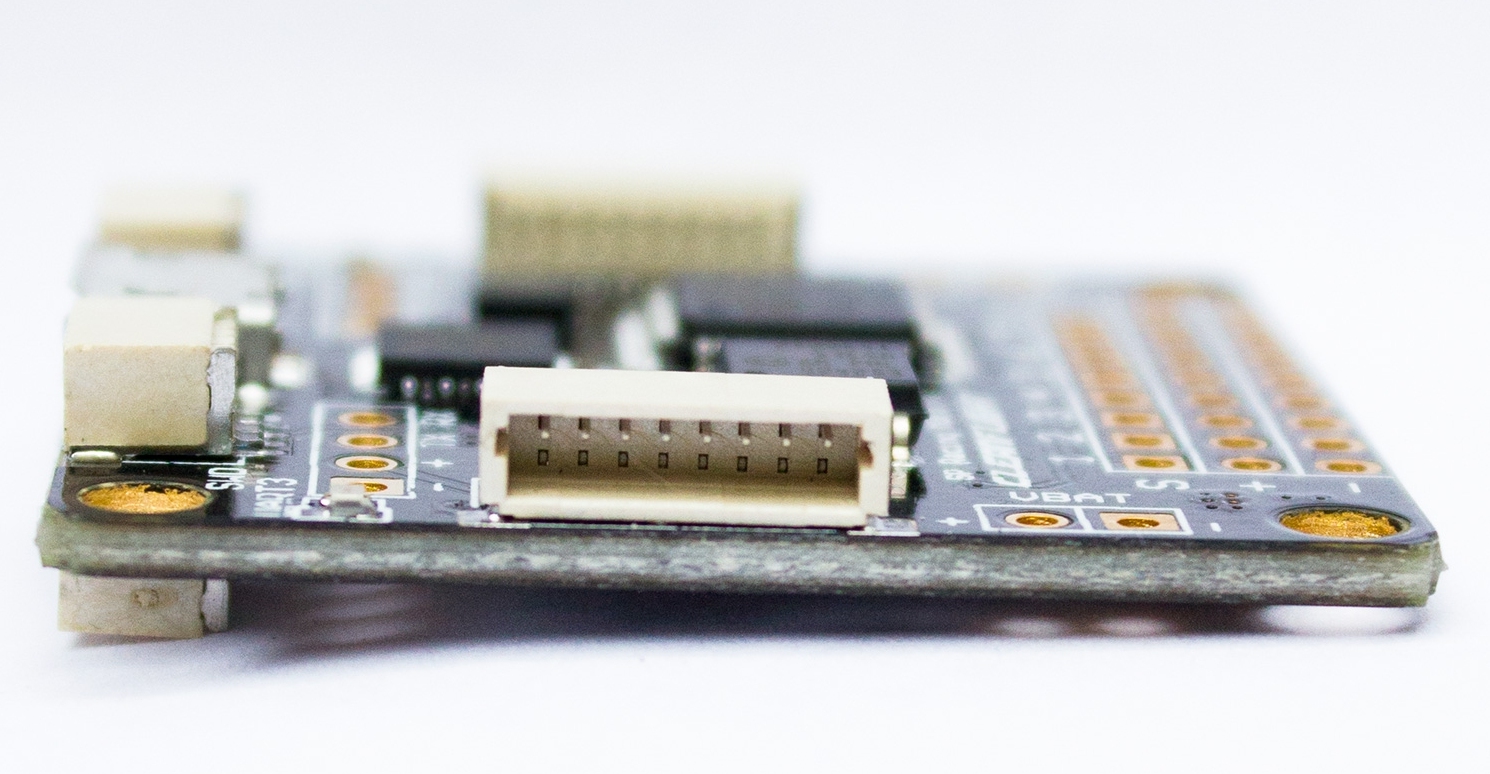
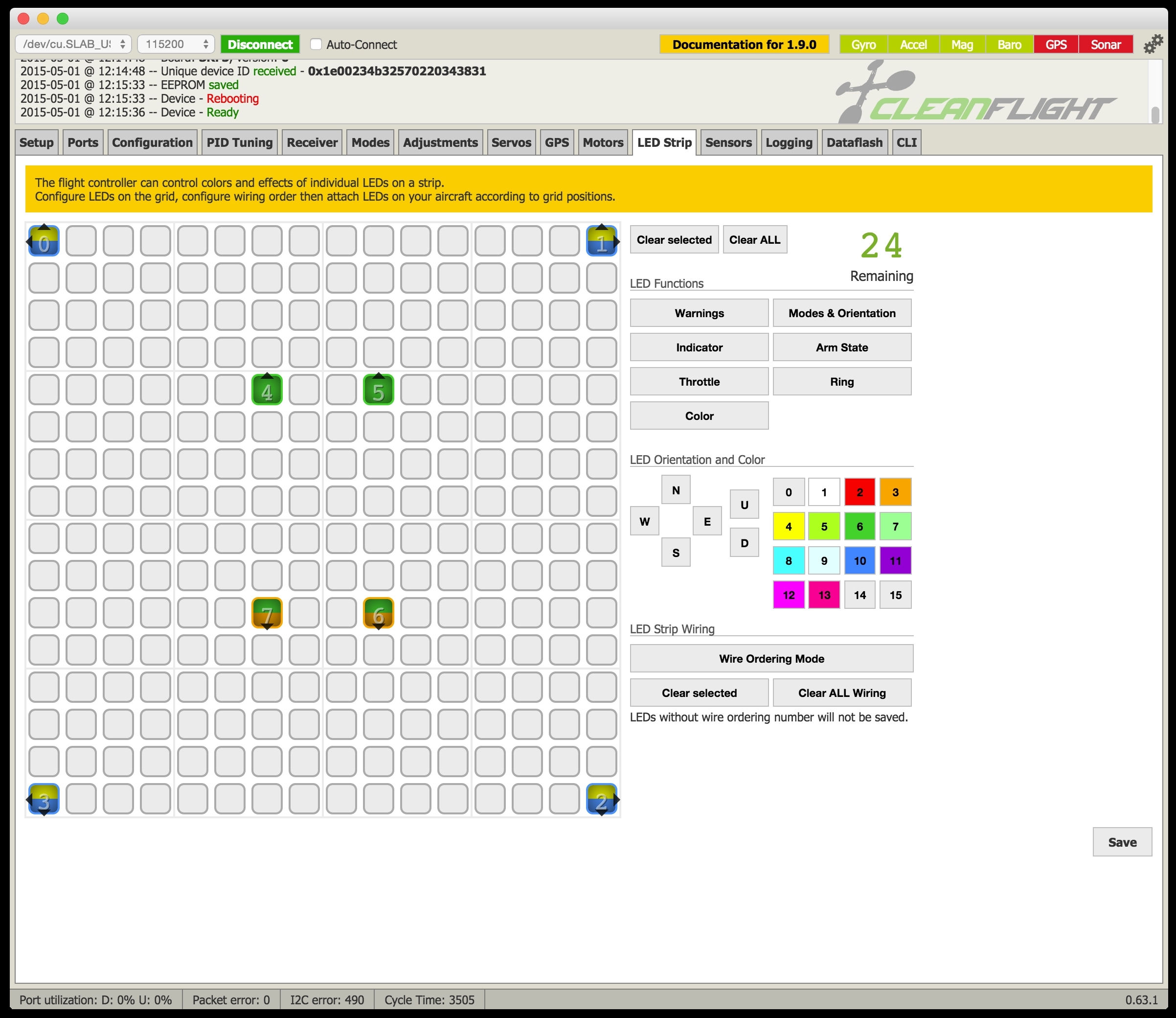
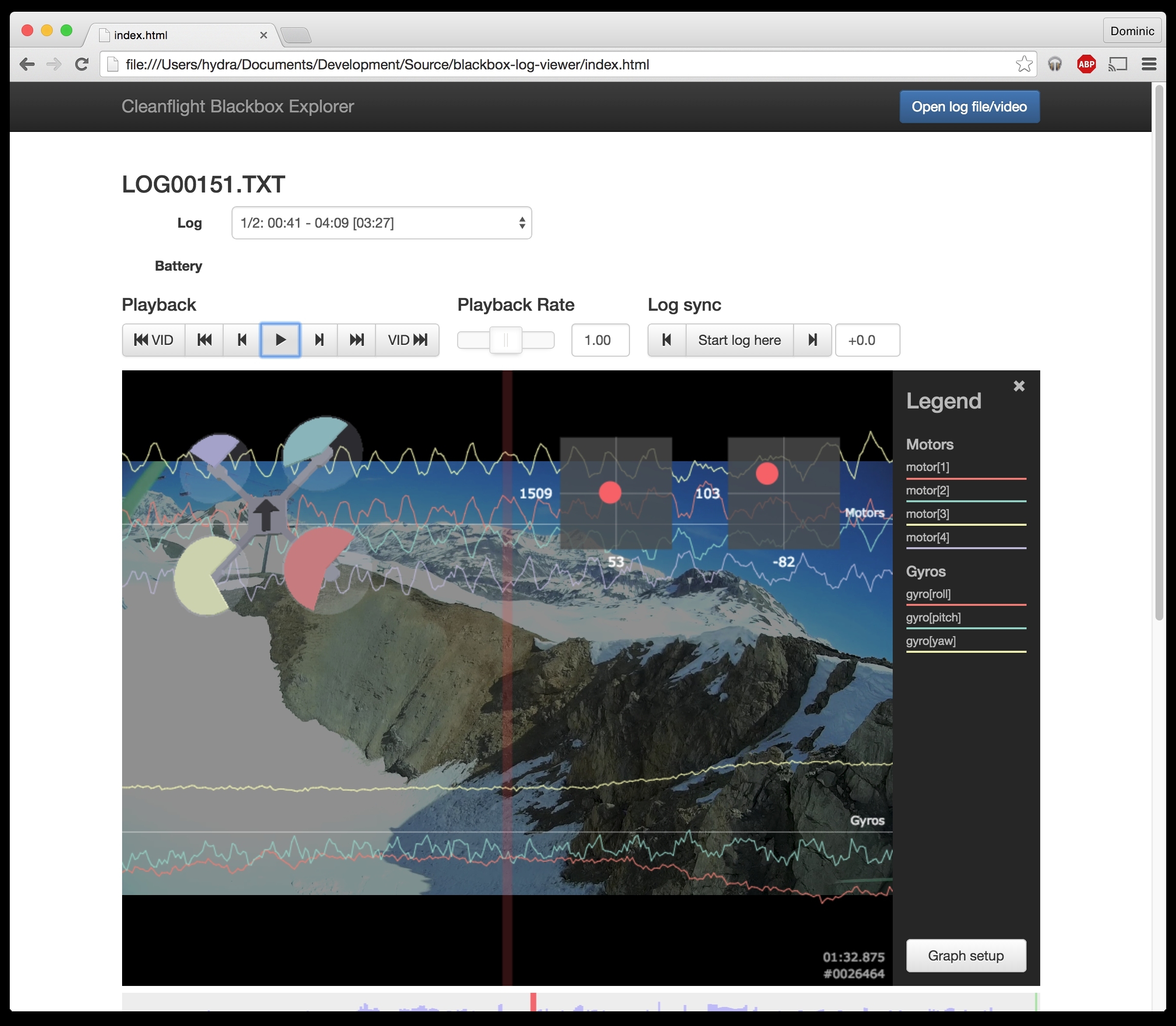
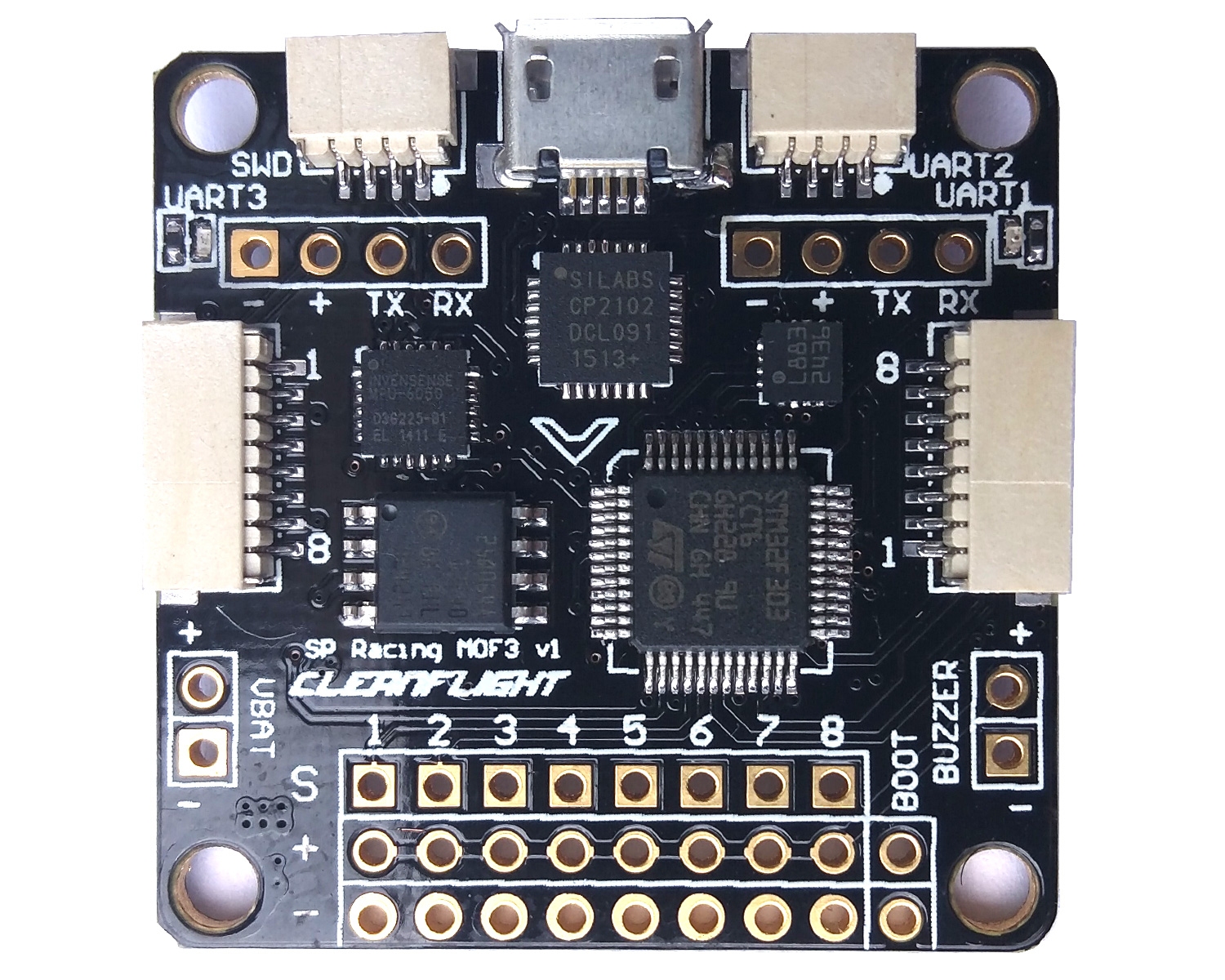 Le contrôleur mesure 3,6 cm de côté, avec des trous de fixation à 3,05 cm, et pèse 6 grammes. Outre le processeur, un ARM Cortex M4 STM32F303 de STMicroelectronics, on trouve un combiné accéléromètre et gyroscope MPU6050, de la mémoire flash de 8 Mo (64 Mbits) pour servir de « boite noire » puisque les informations de vol y sont enregistrées, un connecteur microUSB, 2×8 pins JST-SH pour le branchement vers le récepteur radio en PWM, PPM, Spektrum, SBus, également capable de piloter une barre de LEDs, 8×3 pins pour les connexions aux ESC (jusqu’à 8, donc octocoptère), 2 pins pour la surveillance de la batterie, 2 pins pour brancher un buzzer, 4 pins JST-SH pour un connecteur I2C (destiné à des capteurs additionnels ou le branchement d’un écran OLED), 2×4 pins pour offrir 2 ports série, 4 pins JST-SH pour une sortie de debugging destinée aux développeurs. C’est tout pour la version Acro. La version Deluxe ajoute un baromètre altimétrique MS5611 et une boussole électronique HMC5883.
Le contrôleur mesure 3,6 cm de côté, avec des trous de fixation à 3,05 cm, et pèse 6 grammes. Outre le processeur, un ARM Cortex M4 STM32F303 de STMicroelectronics, on trouve un combiné accéléromètre et gyroscope MPU6050, de la mémoire flash de 8 Mo (64 Mbits) pour servir de « boite noire » puisque les informations de vol y sont enregistrées, un connecteur microUSB, 2×8 pins JST-SH pour le branchement vers le récepteur radio en PWM, PPM, Spektrum, SBus, également capable de piloter une barre de LEDs, 8×3 pins pour les connexions aux ESC (jusqu’à 8, donc octocoptère), 2 pins pour la surveillance de la batterie, 2 pins pour brancher un buzzer, 4 pins JST-SH pour un connecteur I2C (destiné à des capteurs additionnels ou le branchement d’un écran OLED), 2×4 pins pour offrir 2 ports série, 4 pins JST-SH pour une sortie de debugging destinée aux développeurs. C’est tout pour la version Acro. La version Deluxe ajoute un baromètre altimétrique MS5611 et une boussole électronique HMC5883.
Ok, ok, mais on y gagne quoi ?
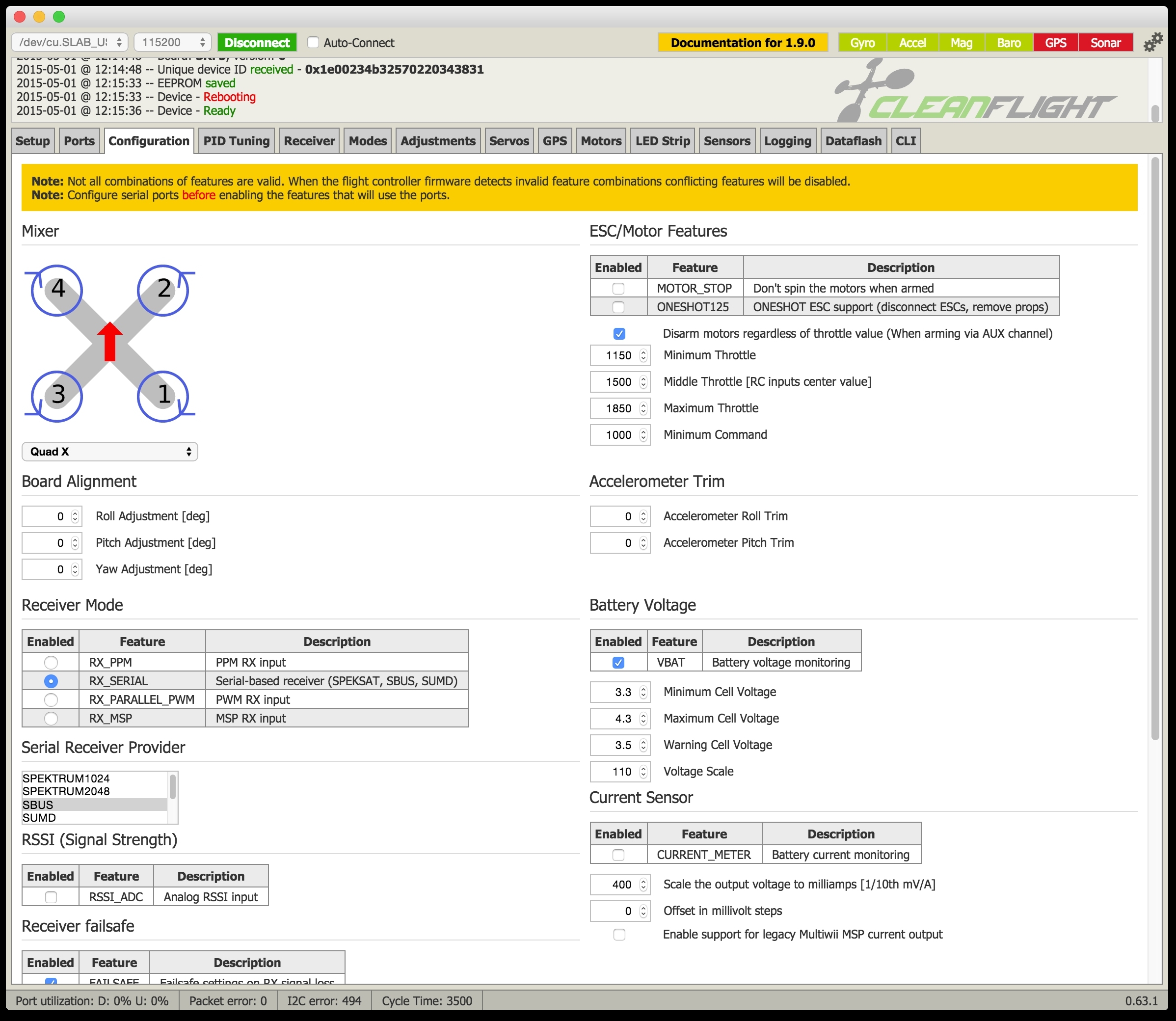
 Le logiciel CleanFlight est en avance sur son concurrent BaseFlight – reste à savoir si cette avance est temporaire ou si elle court sur le long terme. Le SP Racing F3 a été pensé pour CleanFlight et ses fonctions avancées, comme les réponses rapides aux commandes en optimisant les cycles d’horloge des ESC pour le Oneshot 125. Le processeur est réputé fonctionner plus rapidement pour assurer des réponses qui peuvent être jusqu’à 2x plus rapides (par rapport aux processeurs de type STM32F1). Est-ce que ce nouveau contrôleur de vol apporte vraiment une nouveauté par rapport aux Naze32, CC3D et leurs dérivés ? Les pilotes sont partagés. Certains assurent que la réactivité est sans égal, d’autres sont plus circonspects, leurs commentaires ne faisant pas état d’une réelle valeur ajoutée.
Le logiciel CleanFlight est en avance sur son concurrent BaseFlight – reste à savoir si cette avance est temporaire ou si elle court sur le long terme. Le SP Racing F3 a été pensé pour CleanFlight et ses fonctions avancées, comme les réponses rapides aux commandes en optimisant les cycles d’horloge des ESC pour le Oneshot 125. Le processeur est réputé fonctionner plus rapidement pour assurer des réponses qui peuvent être jusqu’à 2x plus rapides (par rapport aux processeurs de type STM32F1). Est-ce que ce nouveau contrôleur de vol apporte vraiment une nouveauté par rapport aux Naze32, CC3D et leurs dérivés ? Les pilotes sont partagés. Certains assurent que la réactivité est sans égal, d’autres sont plus circonspects, leurs commentaires ne faisant pas état d’une réelle valeur ajoutée.
Le meilleur est (probablement) à venir
 Si la petite guerre que se livrent les concepteurs de contrôleurs de vol se poursuit, on peut supposer que certaines fonctions de CleanFlight seront exclusives au SP Racing F3. Le contrôleur de vol via CleanFlight sera-t-il par exemple doté de fonctions plus avancées, avec l’aide d’une tête GPS, comme la restriction de vol à une enveloppe en rayon et hauteur ? Pourra-t-il permettre un retour au point de décollage ? Sera-t-il évolutif pour proposer des vols automatisés par points de passage ? Allons-nous profiter de nouveaux algorithmes de stabilisation ? Difficile à dire pour l’instant. Des contrôleurs de vol concurrents sont positionnés en embuscade, comme le Revo Nano, un OpenPilot tout petit format (3,65 x 2,7 cm) qui peut accueillir un GPS et proposer les fonctions de navigation par waypoints, le retour au point de départ, etc.
Si la petite guerre que se livrent les concepteurs de contrôleurs de vol se poursuit, on peut supposer que certaines fonctions de CleanFlight seront exclusives au SP Racing F3. Le contrôleur de vol via CleanFlight sera-t-il par exemple doté de fonctions plus avancées, avec l’aide d’une tête GPS, comme la restriction de vol à une enveloppe en rayon et hauteur ? Pourra-t-il permettre un retour au point de décollage ? Sera-t-il évolutif pour proposer des vols automatisés par points de passage ? Allons-nous profiter de nouveaux algorithmes de stabilisation ? Difficile à dire pour l’instant. Des contrôleurs de vol concurrents sont positionnés en embuscade, comme le Revo Nano, un OpenPilot tout petit format (3,65 x 2,7 cm) qui peut accueillir un GPS et proposer les fonctions de navigation par waypoints, le retour au point de départ, etc.
Combien ça coûte ?
Le SP Racing F3 est encore en diffusion restreinte, donc un peu compliqué à trouver à la vente. Il est commercialisé $79 en version Deluxe chez GetFPV (hors port et taxes), et $65 en version Acro chez MassiveRC (hors port et taxes). Le manuel du SP Racing F3 se trouve ici. Le site officiel se trouve là.
D’autres photos



Je ne vois rien de plus que sur une flip32+ ??
Y’a un contrôleur pas mal aussi c’est le BrainFPV de Taulabs qui inclut l’OSD graphique en plus de tout le reste. Là c’est un hardware qui sort du lot!
Je l’ai découvert hier, il a l’air pas mal mais faudra attendre un peu pour vraiment savoir ce qu’il vaut.
Le brainfpv est assez cher par rapport au concurrent je trouve. J’ai vu aussi emax sortir un clone de naze32 sous cleanflight, mais je doute de la valeur ajouté.
En tout cas l’arrivé de nouvelle itération de contrôleur va continuer à pousser les amélioration.
C’est très bon tout cette concurrence !
Dans les avantage hardware eux-meme on trouve tout de meme:
– Inverseur logique intégré (pour brancher un recepteur sbus sans matos supplementaire)
– Logger intégré (fonction boite noire a la flytrex)
– Cables jst à la « smart port » de la cc3d
Apres pour le reste du hardware c’est effectivement plus ou moins une naze32/flip32 sans grande innovation sensible
Coté software non plus rien de bien neuf, c’est le bon vieux cleanflight des familles 🙂
Ben ce serait bien que les développeurs partent sur les quaternions…
Car le repère basé sure Euler montre clairement ses limites vis à vis des cabrioles de ces petites machines (blocage de cardan ou « Gimbal lock ») si on veut se servir du magnéto et des accéléros en même temps que les gyros, et tout cela sans saturation angulaire…
C’est un peu la limite actuelle… Mais cela nécessite de passer en entrée pour la partie commande, pour l’estimateur et pour les consignes de tout travailler en quaternion…
Et là c’est pas trivial.
Mais bon, ça se saurait si les informaticiens étaient également automaticiens… 🙂
@le proto : Tu as conscience que tu as lâché 99 % du monde sur le dernier mot de ta première phrase ? ;-)))
Mais non c’est parfaitement clair regarde:
https://fr.wikipedia.org/wiki/Quaternion
Et sinon pour l’effet « vache qui rit » tu as les fractales en 4D qui vont avec:
http://paulbourke.net/fractals/quatjulia/q3big.gif
je capte rien à ce que c’est censé etre mais c’est très jouli :p
Il y a bien ce site qui tente une explication (http://www.blog.francis-leguen.com/fractales-les-quaternions/)
« En mathématiques, un quaternion est un type de nombre hypercomplexe »… mais bon deja qu’avec un nombre complexe c’est deja trop complexe… je te parles pas du *hyper*complexe 🙂
Plus serieusement, coté software c’est certains que ces dernières années on « stagne » un peu du point de vue algo dans nos petites machines. Multiwii a bien contribué à répandre la boucle de contrôle par PID, mais jusqu’ici, personne n’a vraiment trop touché à ce sacro-saint algo pour proposer mieux.
La prochaine « révolution » viendra donc surement de celui qui osera prendre le taureau par les cornes 🙂
@Fabien : Héhéhé, merci pour les hyperliens 🙂 🙂 A la différence de Sir William Rowan Hamilton, je n’ai jamais eu d’éclair de génie. Pourtant, j’aimerais tant… ;)))
Tant qu’à balancer des liens, autant en donner qui ont rapport avec le sujet. 😀
https://fr.wikipedia.org/wiki/Quaternions_et_rotation_dans_l'espace
C’est dur à comprendre, mais ce sera facile plus tard.
Pour le phénomène de blocage de cardan pour les angles d’Euler avec une anecdote sympa:
https://fr.wikipedia.org/wiki/Blocage_de_cardan
Désolé d’avoir perdu du monde, mais d’autres peuvent être intéressés pour ce qui concerne l’évolution futur…
C’est utilisé aussi dans les logiciels de création 3D comme Blender, et ils ont eu ces problèmes bien avant les drones… 🙂
Merci pour les liens je me tape ca apres un doliprane 😉
L’article sur les blocages de cardan semble plutot pas mal foutu (et plus accessible) je vais lire ca avec attention!
Et pour ceux qui veulent une vulgarisation plutot efficace du systeme PID utilisé actuellement: http://www.helimag.com/articles-review/18611-asservissement-et-gyroscopes.html
« le Revo Nano, un OpenPilot tout petit format (36,5 x 2,7 cm) »
36cm de long sur 3cm de large, c’est pas si petit que ca, y’a coquille là 😉
c’est pas plutot 36.5×27 mm ou 3.6×2.7cm ?
@Poulpy : Plus c’est long plus c’est bon ! Ahem. C’est une coquille, et j’ai corrigé… Merci 🙂 🙂
C’est vrai que ce n’est pas simple tout cela.
Ben c’est pas simple mais c’est ce qui fait qu’un multirotor, à priori instable, vole!
Du coup, c’est vraiment sur l’asservissement qu’il faut aussi travailler, surtout lorsqu’on voit des systèmes embarqués fermés comme ceux de DJI qui sont utilisés alors que 95% des dronistes utilisent des codes les yeux fermés…
Genre je prends un code APM Autopilot avec un PX4 et « ça va le faire »
C’est là l’écart entre la mécanique du vol et l’automatisme…
Ils font confiance en un code qui ne fonctionne pas toujours car ils ne s’y plonge pas, et y pipe de toutes façons quedalle, mais par contre on va chercher des pouillèmes sur des combos groupe motopropulsifs hélice-moteur-ESC-batterie..
La situation est rigolote quand on y pense. 🙂
Pfff… Faut vraiment qu’ils arrêtent de sortir tous les jours de controleurs de vol!! je peux plus suivre moi j’ai plus assez de frame pour les faire voler !! ;-D
KK2, Naza v1, Multiwii 1.0 & 2.5, nanowii, CC3D, Naze32, Pixhawk …
Bon, je vais encore me dévouer je vais acheter une nouvelle frame 250 🙂
Quelqu’un connaît une carte capable de remplacer une alienwii ?
L’idée est de m’en servir dans un alias afin de pouvoir le piloter avec une radio commande.
Pour l’instant je n’ai pas de rc mais de ce que je lis la Taranis à l’air d’être la mieux.
Donc le contrôleur doit avoir le récepteur déjà intégré si j’ai bien compris?
@le proto: Tu connais du monde qui travail sur des nouveaux algos ? Sa fais un moment que je voulais me lancer la dedant du coup je cherche du monde !
Bonjour à vous tous, je viens de recevoir ceci :http://www.banggood.com/Upgrade-NAZE32-SP-Racing-F3-Flight-Control-6-DOF-10-DOF-for-Milticopter-p-1010232.html