Deux hélices, pas de plateau
 Les hélicoptères de type birotors doivent cumuler deux moteurs et deux servos pour tirer ou pousser les biellettes qui actionnent un plateau cyclique, et la plupart du temps être équilibrés par une barre de Bell. Ceux qui ont expérimenté un crash d’un birotor le savent : il faut partir à la recherche des biellettes qui sautent – elles adorent jouer à cache-cache dans l’herbe – et racheter régulièrement des pièces sur le plateau. Une équipe du Modlab de l’université de Pennsylvanie à Philadelphie a imaginé un birotor dépourvu de plateau cyclique.
Les hélicoptères de type birotors doivent cumuler deux moteurs et deux servos pour tirer ou pousser les biellettes qui actionnent un plateau cyclique, et la plupart du temps être équilibrés par une barre de Bell. Ceux qui ont expérimenté un crash d’un birotor le savent : il faut partir à la recherche des biellettes qui sautent – elles adorent jouer à cache-cache dans l’herbe – et racheter régulièrement des pièces sur le plateau. Une équipe du Modlab de l’université de Pennsylvanie à Philadelphie a imaginé un birotor dépourvu de plateau cyclique.
Orientation des pales
 Pour débarrasser leur prototype du plateau cyclique et de ses deux servos, ainsi que de la barre de Bell, les chercheurs ont imaginé deux hélices contrarotatives dont les pales sont montées avec un système d’inclinaison, un peu comme une hélice à pas variable. Mais l’inclinaison passe du pas nul à un pas élevé à chaque demi rotation. C’est ce qui assure la stabilité de l’ensemble, en introduisant une oscillation sinusoidale en phase avec la rotation. Le pilotage se fait en faisant varier plus ou moins le pas des deux pales de chaque hélice, ce qui modifie l’amplitude et la phase de l’oscillation.
Pour débarrasser leur prototype du plateau cyclique et de ses deux servos, ainsi que de la barre de Bell, les chercheurs ont imaginé deux hélices contrarotatives dont les pales sont montées avec un système d’inclinaison, un peu comme une hélice à pas variable. Mais l’inclinaison passe du pas nul à un pas élevé à chaque demi rotation. C’est ce qui assure la stabilité de l’ensemble, en introduisant une oscillation sinusoidale en phase avec la rotation. Le pilotage se fait en faisant varier plus ou moins le pas des deux pales de chaque hélice, ce qui modifie l’amplitude et la phase de l’oscillation.
Ca sert à quoi ?
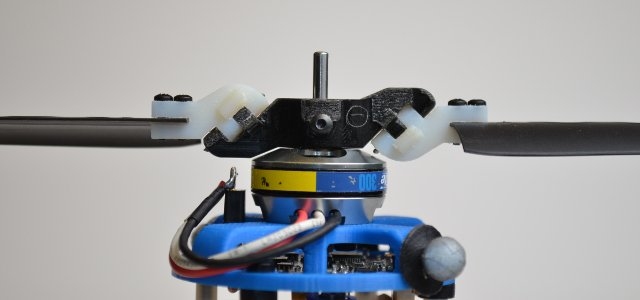 Ce sont des travaux d’universitaires, leur application n’est pas forcément immédiate. Mais on peut imaginer ce mécanisme généralisé sur des appareils de petite taille pour assurer un vol stationnaire avec deux rotors seulement et sans servos, ce qui permet une économie d’énergie et des autonomies plus élevées, pour un budget plus léger. Notez que la structure autour du prototype ne sert qu’à la protection des rotors, pas à sa stabilisation.
Ce sont des travaux d’universitaires, leur application n’est pas forcément immédiate. Mais on peut imaginer ce mécanisme généralisé sur des appareils de petite taille pour assurer un vol stationnaire avec deux rotors seulement et sans servos, ce qui permet une économie d’énergie et des autonomies plus élevées, pour un budget plus léger. Notez que la structure autour du prototype ne sert qu’à la protection des rotors, pas à sa stabilisation.
La page du projet Underactuated rotor for simple micro air vehicles se trouve ici.


Euh,
j’ai pas bien compris comment faire varier le pas variable.
Si il est pas variable je ne vois comment on peut le faire varier, c’est un peu comme manquer les immanquables !
Mais c’est à pas variable. Comme à pas de loup. Ou appât de loup. Et donc pas pas variable.
Ok, je sors.
moi aussi j’arrête mes bêtises
bonne journée a toutes et tous
Jolie étude de style; Faudra voir sur du long terme si c’est fiable.
Le principe est celui des roues avant de 2CV : quand on tourne le volant elles s’inclinent en plus de pivoter. Mais est-ce qu’en variant la vitesse du moteur du haut cela change quelque chose à ce niveau ?? et en plus même si le montage est en sens opposé sur chaque pale (c’est pour ça que Fred parle de demi rotation), comment cela permet d’indiquer au bi-rotor la direction où il doit aller ??
Mystère !!
L’essentiel c’est que ça a bien l’air de fonctionner !!
En tout cas, comme ça n’a pas l’air bien compliqué à fabriquer pour les chinois, j’ai bien hâte d’en avoir un dans les main 😉
Leur système est vachement intelligent : le pitch est contrôlé par un couple sinusoïdale additionné au couple du moteur… En contrôlant l’amplitude et la phase du sinus (par rapport à l’orientation du moteur), ils arrivent à contrôler la « poussée vectorielle » un peu comme un plateau cyclique d’hélico.
Du coup ils ont développé un ESC custom, qui prend tout ça en compte… (ils ne donnent pas bcp de détails là dessus par contre)
Wow. 😛 Bon reste à voir en condition moins idéales ce que ce contrôle donne comme performances (genre avec du vent), mais ça a l’air prometteur. J’aimerais bien voir ce que cela pourrait donner avec un système un peu plus gros et en extérieur. 🙂
L’article : http://vigir.missouri.edu/~gdesouza/Research/Conference_CDs/IEEE_IROS_2013/media/files/2221.pdf
Le brevet (évidemment) : http://www.google.com/patents/WO2014160526A2?cl=en
c est cool que les avancees tech soient aussi sur autre chose que les multi rotors.
très intéressant ! a suivre de près
j’ai rien compris 🙁
Merci bbenj j’ai tout compris
Merci pour le lien de l’article complet
Super système en tous cas! Seul pb pour le moment, nos moteurs sont plutot sensor-less (a par les voitures RC un peu haut de gamme), esperons que ca sorte vite tout ca 🙂
A quand l’intégration dans BLHeli? :p
ça m’fait penser à louise attaque…
c bon c bon, je connais la sortie.
Elle est parisienne 🙂
Le sensorless a quand même un avantage, c’est plus fiable (c’est relatif évidemment…), moins lourd et surtout moins cher 🙂
Mais c’est moins performant à basse vitesse. Et un moteur sensored (avec capteurs) est plus facile à piloter 😛
Plein d’électronique complexe qui remplace un plateau d’hélico, en gros 😉
En moins gros, la construction de l’hélice fait que, avec un moteur « normal » (sans leur contrôle de couple), l’hélice aurait tout le temps un pas nul, ou quasiment. Mais en donnant de petites impulsions de couple (de vitesse, pour simplifier) positives ou négatives, le pas des hélices augmente ou diminue*. Comme cette impulsion est pilotée en fonction de la position des hélices par rapport au drone, on peut par exemple augmenter le pas d’un côté du drone, donc augmenter la poussée de ce côté là, et donc avancer vers le côté opposé… Comme un plateau d’hélico…
C’est le principe, d’après ce que j’ai compris. C’est plus clair ? :-p
* En regardant la dernière image de l’hélice montée sur le moteur, on peut imaginer qu’en poussant l’hélice de gauche son pas augmente et en tirant l’hélice de droite son pas diminue (sans que le moteur ne tourne). C’est ce qui arriverait si on donnait une impulsion au moteur vers la droite (sens anti-horaire vu de dessus).
Any replica?