Blade 200QX et DeviationTX
 En attendant que les hélices destinées à la voltige et aux vols dos soient disponibles à l’achat (voir ici), vous pouvez vous entrainer à réaliser des tonneaux et des loopings avec le Blade 200QX de Horizon Hobby. Les manœuvres sont particulièrement faciles avec une radiocommande Devo de Walkera flashée avec le firmware alternatif DeviationTX (voir là).
En attendant que les hélices destinées à la voltige et aux vols dos soient disponibles à l’achat (voir ici), vous pouvez vous entrainer à réaliser des tonneaux et des loopings avec le Blade 200QX de Horizon Hobby. Les manœuvres sont particulièrement faciles avec une radiocommande Devo de Walkera flashée avec le firmware alternatif DeviationTX (voir là).
Changement de mode automatique
Le Blade 200QX est doté de fonctions de stabilisation hyper efficaces (Stabilité, Stagilité), qu’il est possible de débrayer pour passer en mode manuel (Agilité). Le mode Stabilité est hyper stabilisé pour les débutants. Le mode Stagilité est plus agressif, mais il ne permet pas de faire basculer l’appareil pour de la voltige. Le mode Agilité permet de réaliser des tonneaux et des loopings, mais il faut être très bon pilote pour rétablir l’équilibre de l’appareil. L’intérêt du module Blade 200QX pour DeviationTX ? Il automatise l’arrêt et la reprise de la stabilisation. Comment ça marche ? Le mode Stagilité (diode bleue) maintient l’équilibre tant que vous ne poussez pas les joysticks trop loin. 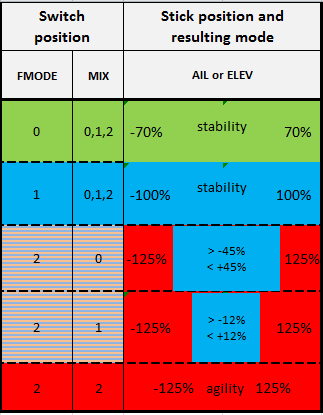 Au-delà d’une certaine valeur, la radiocommande désactive la stabilisation (passage en mode Agilité, diode rouge) et vous pouvez laisser l’appareil réaliser sa pirouette. Quand elle est terminée, relâchez le joystick : le Blade 200QX repasse tout seul en mode Stagilité (diode bleue) et la stabilisation est réactivée. Vous n’avez pas à faire des efforts pour rétablir l’équilibre, l’appareil se remet d’aplomb même si vous étiez dans une posture difficile. Le module dispose même de deux modes « Stagilité intelligente », l’un déclenchant plus vite que l’autre le mode Agilité (à 45 % de débattements, et à 12 % seulement)… Attention, vous pouvez enchainer hyper facilement les figures… mais il faut prendre pas mal de hauteur sous peine de descendre un peu rapidement !
Au-delà d’une certaine valeur, la radiocommande désactive la stabilisation (passage en mode Agilité, diode rouge) et vous pouvez laisser l’appareil réaliser sa pirouette. Quand elle est terminée, relâchez le joystick : le Blade 200QX repasse tout seul en mode Stagilité (diode bleue) et la stabilisation est réactivée. Vous n’avez pas à faire des efforts pour rétablir l’équilibre, l’appareil se remet d’aplomb même si vous étiez dans une posture difficile. Le module dispose même de deux modes « Stagilité intelligente », l’un déclenchant plus vite que l’autre le mode Agilité (à 45 % de débattements, et à 12 % seulement)… Attention, vous pouvez enchainer hyper facilement les figures… mais il faut prendre pas mal de hauteur sous peine de descendre un peu rapidement !
Merci à LittleMonkey
Les forums de DeviationTX sont un lieu de partage des connaissances et des modules. Celui pour le Blade 200QX a été réalisé par LittleMonkey, un français… qui est souvent parmi nous sur Helicomicro ! Pour profiter de DeviationTX, rappelons qu’il faut une radiocommande de type Devo haut de gamme. Le module de LittleMonkey est téléchargeable dans les forums de DeviationTX, ici.
La vidéo
Ok, on ne voit pas bien les tonneaux… il faut dire que le Blade 200QX est vraiment petit !


arhhhh … si ça continue je vais craquer pour ce petit Blade …
Belle explication du mode mixant agilité et stabilité 😉
Le but premier est de voir comment le quad réagi durant les figures avant de passer en full agilité.
Pour info, j’ai mis à jour le post deviationTx avec une nouvelle config (en bas de page …) qui supprime la zone morte au centre des stick AIL et ELEV en mode agility 😉
Ca permet d’avoir un bon controle du quad en full agility et rend moins raide la prise d’angle lorsqu’on passe de stabilité vers agilité. 😉
Comme le mode Horizon de la Naze 32 !
Radio haut de gamme ça veut dire a partir de quel modèle svp?
DeviationTx fonctionne sur les radiocommandes Devo 6,7e,8,10, 12.
voir les firmwares DeviationTx : http://www.deviationtx.com/repository/Deviation-Releases/Deviation-4.0.1/
Absolutely! 🙂
Merci à toi pour ce module DeviationTX 🙂 🙂 🙂
Ce sont les DEVO 6/6S/7e/8/8S/10/12/12S…
à mon avis il faut que la devo est 2 boutons avec 2 position pour que cela fonctionne.
De rien, tant qu’a le faire, autant le partager. 🙂
Parmi les améliorations récentes dans la config, le TRIM droit supplémentaire de la DEVO 8s (celui situé en haut de la Tx, à côté des switchs MIX et ELEV D/R), est configuré pour ajuster l’offset qui commande le passage de stabilité vers agilité.
Donc les seuils 45% et 12% sont ajustables en live.
Je recommande toutefois de configurer ce seuil sur des positions extrèmes 50% pour que le quad ne soit pas régulièrement entrain de passer d’un mode à un autre.
J’espère que ton quad va bien après la pirouette de fin de vidéo. C’est clair qu’il descend vite lorsqu’on multiplie les pirouettes 🙂 :
http://www.youtube.com/watch?feature=player_embedded&v=_laIoOoQNu4
D’accord merci beaucoup pour toute vos réponses =)
Hé hé super….j’ai hâte d’essayer ce nouveau mode
Merci bcp littlemonkey et merci Fred pour l’explication in french 😉
Quel incidence tes dernières acrobaties littlemonkey ?
Et petite question pour les utilisateurs de devo 8s :vous utilisez quoi comme »piles » pour la faire fonctionner ? Lipo ? Perso une lipo 3s 1000mah mais j’ai l’impression qu’elle consomme beaucoup…
PS: je crois qu’il y’a une coquille au début de l’article : »Le mode Stabilité est hyper stabilisé….Le mode Stabilité est plus agressif…. » 😉
J’ai un ami qui a utiliser des gemfan en 5/3 , chauffé au décapeur thermique pour leurs donner un profil 3d un peu de mousse double face pour les caler et op ça vole super .
Très bonne machine qui permet un vole dos avec accelerometre 😉 .
Je conseille pour apprendre la 3d 😉 .
D’ailleurs sur Multi-voltige un des admin @Foxxy a fait un tuto pour flashes le esc en 3d 😉 .
Bon vole et merci pour tout ces petit article bien sympathique .
Willoo
D’ailleurs on peux aussi le mettre a jours les anciens donc les trouver pour pas trop cher d’ocas 😉 .
De rien. 🙂 Finalement je n’ai fait qu’adapter au 200QX DeviationTx un principe qui avait été montré en début d’année pour le 350QX par Indoorheli (du forum rcgroup).
D’autres l’ont implémenté différemment (pour la devo 10 par exemple).
« Quel incidence ? » N’étant pas familier des acrobaties je ne les aurais pas essayé sans une p’tite aide des gyros en fin de voltige. Donc le mix stabilité/agilité est parfait pour moi.
(ca me m’a pas empêcher une première casse 🙂 : http://nsa34.casimages.com/img/2014/08/18/140818012104927148.jpg)
Ceux qui maîtrise complètement le mode agilité ne trouveront probablement pas d’intérêt au mode stagilité.
Par contre je leur recommande tout de même d’essayer la version : le mode agilité utilise une courbe de réponse sur AIL et ELEV qui permet de supprimer la zone sans réponse du quad lorsqu’on se trouve à proximité de la position centrale. 😉
Pour les piles DEVO 8s j’utilise 4 x NiMH 1.2V 2400 mAh.
Leur autonomie varie avec la puissance d’émission de la Tx.
Quand je fais des essais de vol en intérieur ou je joue avec la config, je suis souvent à 100µW. (portée <10m).
Le risque est d'oublier de revenir à 10mW en extérieur.
(Pmax autorisé)
Du coup en prenant la dx7e ça baisse un peu le prix du 200qx+radio, et pour plus de fonctionnalité du coup ! J’ai pas encore craquer, mais ça devient de plus en plus dur de se retenir !
Pareil. L’autonomie varie beaucoup, selon la puissance comme dit LittleMonkey, mais aussi si tu passes du temps à configurer. Ca allume l’écran et ça pompe pas mal. Je ne sais pas ce que ça représente en heures, mais je vais dire que je fais environ 20 séances de vol par charge…
Ah ouais, quand même 🙂 C’est sauvage, ça, au décapeur thermique 🙂
Yes, merci, j’ai corrigé la coquille ! 🙂
C’est la technique Warthox (voltigeur quadri allemand) .
C’est sauvage mais ça fonctionne bien et a moindre coup .
J’ai des amis qui utilise cette technique pour du 8pouces et du 9pouces en voltige 3d avec de vrais quad !
Ha ok, ça correspond a ce que j’ai
My pleasure …..;)
Ça ira pour cette fois mais attention à ce que ça ne se reproduise plus 🙂 🙂
Glups, la pression, la pression 😉 😉
🙂
Bon, j’ai enfin pu tester cette nouvelle config, enfin presque, car vue le temps pourri…. indoor obliged
J’ai fait comme la vidéo de Fred, en statique pour voir si tout était ok et ça l’est 😉 nikel 🙂
Le but de ce post, c’est de prévenir que le mode stabilité (vert) est aussi affecter par ce « mixage », en effet quand on mets du cyclique avant, les gaz augmentent aussi et le plafond se rapproche vite, donc gaffe quand même, le seul moyen de « contrôler » l’avance et d’y aller très mollo sur le stick….
Curieusement en mode stagilité normal (bleu), je n’ai pas ressenti ce phénomène mais faut dire que j’y suis allé très mollo vue la place que j’avais à disposition
Vue le temps pourri, je n’ai pas pu essayer les autres modes et surtout le agilité modifié mais je me permettrai de faire un petit retour ici…
Attention, je ne critique rien, bien au contraire mais la précision sur le mode stabilité me paraissait importante
Comme tu l’as remarqué, il y a effectivement un mixage entre les gaz (throttle) et les stick ELEV et AIL.
J’avais essayé de l’expliqué sur DeviationTx. En fait en mode stabilité vert et bleu, il une courbe expo \_/ qui augmente les gaz de façon exponentielle avec l’angle que prend le quad.
L’idée en mode stabilité « vert ou bleu » est que si tu part d’une position où le quad est stabilisé en l’air, si tu pousse ELEV ou AIL dans n’importe quel angle, sans toucher à la manette des au gaz, il doit aller dans la direction souhaité sans « trop » changé d’altitude.
C’est pour éviter les gamelles pendant les « punchs ». 😉
En pratique en extérieur avec le vent il faut tout de même ajuster les gaz pour garder l’altitude. (et suppose que d’un quad à un autre, ces courbes devraient être adaptées également).
En mode agilité, par contre ce mixage est automatiquement déactivé (sinon la gestion des gaz rendrait impossible la voltige).
Autre particularité de la config : la sécurité sur la coupure des moteurs.
Les moteurs ne se coupent QUE si le stick de gaz (throttle) est à une position inférieure à -93%.
C’est pour éviter un crash en altitude en basculant le switch « RUDD D/R » (= throttle cut dans la config) par erreur.
En pratique si :
– tu commute le switch « RUDD D/R » involontairement à 0 alors que le quad est en l’air (gaz > -93%), il ne se passera.
– Tu peux même remettre ce switch à 1, il ne lancera pas la séquence d’armement des moteurs (qui provoquerait une rotation du quad …)
– si tu commute d’abord le switch « RUDD D/R » à 0, les moteurs ne se couperont que lorsque la manettes des gaz passera sous les -93%.
– si tu baisses d’abord la manette des gaz sous les -93%, les moteurs se couperont immédiatement à la commutation du switch « RUDD D/R » à 0.
Tout ça est expliqué sur DeviationTx, mais comme c’est en anglais, et que c’est important, je préfère le souligner.
Merci pour ces explications in French et oui moi aussi ça me parait important de les faire….
Ta sécurité ma surpris un peu ….question d’habitude, l’idéal, pour moi, serait simplement qu’une fois les gaz coupé à fond les moteurs s’arretent…
Sinon, j’ai enfin pu tester ton mode acrobatie « assisté » et c’est TIP TOP ! 🙂 🙂 🙂
J’ai pu passer toutes les figures que je connais, back et front flip, tonneaux gauche et droite (on dit rolls ?) sans le moindre crash…après plusieurs essais on peut les faire assez bas tellement cela vas vite
Bien sûr, avec la confiance j’ai voulu enchaîner les figures et là les « petits » crash sont arrivés ;)ah la confiance… 😉
Donc reste plus qu’a s’entraîner et avoir les bons réflexes avec les interrupteurs sur la radio (c’est ma 1ère radio programmable).
Si quelqu’un a des liens pour mieux appréhender les réglages et la programmation: je prends 😉
En tout cas un grand merci à Littlemonkey pour tout ça et Fred pour le partage 🙂
Content que tu ais pu t’amuser avec le mix stabilité / agilité. 🙂
Prochaine étape le mode agilité « sans gyro » (peut être en augmentant un peu l’expo au début pour bien le prendre en main).
Tonneau / Roll pour les rotations vers la gauche ou droite c’est bien 😉
« l’idéal, pour moi, serait simplement qu’une fois les gaz coupé à fond les moteurs s’arretent… »
Le problème est que sur le blade il y a une séquence d’armement des moteurs. Donc si tu « coupe » les moteurs en cours d’acrobatie (parce que les gaz sont au minimum), il ne redémarreront qu’après une séquence d’armement qui prendra plusieurs secondes … Donc c’est le crash assuré.
Je pensais plus à déactiver la sécurité sur la coupure moteur lorsqu’on est en FMODE = 2 (donc accrobatie possible). Comme ça il suffit d’une action (RUDD D/R = 0)pour couper les moteurs, au lieu de 2 ce qui peut être utile lors d’une perte de contrôle en mode accro.
Tout l’intérêt de DeviationTx est de pouvoir personnaliser la config afin de faire quelque chose qui nous correspond le mieux.
Il faut juste bien tester les modifications avant d’être en l’air à 50 m d’altitude. 😉 (notamment vérifier l’état de sortie des différents canaux sur l’affichage de la radiocommande seule)
La doc DeviationTx est là : http://www.deviationtx.com/repository/Documentation/French/
Et bien merci pour cette réponse complète et détaillée 🙂
Encore pas mal d’entraînement pour pouvoir voler complètement en mode agilité…mais je persévère 😉
Ce que j’aime bien aussi avec deviation c’est qu’on peut passer d’une config à une autre assez rapidement
Bonjour a tous! Suite a l’achat du blade 200qx je suis a la recherche du radio,je suisvraiment débutant niveau radio on me conseil la dx6i. J’aimerai savoir l’avantage par rapport a une dx5e. Quelqu’un connait un site ou forum avec des explications ? Merci
Bonjour,
je me renseigne encore ^^ (je ne l’ai toujours pas acheter :-P)
Donc ma question était : si j’achète ce quadri, vaut mieux que je prenne une devo 7 ou alors une DX6i (sachant que j’aimerai profiter de ce mode pour la voltige ^^)?
Hello,
Serait-il possible de gérer un servo avec la voie prévu pour actionner la caméra?
Je voudrais me faire un délire avec un trueil mais je ne sais pas comment régler la radio?
Merci d’avance de votre aide.
Baddoc
Bonjour,
je déterre un peu tout cela mais serait-il possible de mettre à dispo le .ini pour le 200qx sur deviation ?
Les liens du forum ne marchent plus du tout…
d’avance merci