AutoQuad M4
Jusqu’où peut-on aller dans la miniaturisation de l’électronique à bord des engins volants ? Les derniers micro quadricoptères comme le CX-10 de Cheerson sont étonnants. Malgré leur look jouet, ce sont des vrais appareils à piloter, avec une aide au pilotage vraiment réussie. Comment aller plus loin ?
Un projet Open Source
L’avenir, c’est peut-être AutoQuad qui est en train de le dessiner. Il s’agit d’un projet Open Source Firmware (logiciel) qui fonctionne sur un « closed source hardware ». Wazzzaaaaaa ? En d’autres mots, le projet AutoQuad consiste à réaliser des cartes électroniques contrôleurs de vol animées par un logiciel Open Source à l’intérieur. La version encore simplifiée : le projet consiste à commercialiser des contrôleurs de vol inventés AutoQuad, avec un logiciel interne évolutif et modifiable par tout développeur. Il existe déjà plusieurs cartes en vente, notamment l’AutoQuad 6 qui mesure 5 x 6 cm, et qui se trouve destiné aux multirotors de grande taille. La nouveauté d’AutoQuad, c’est la miniaturisation.
Piti format
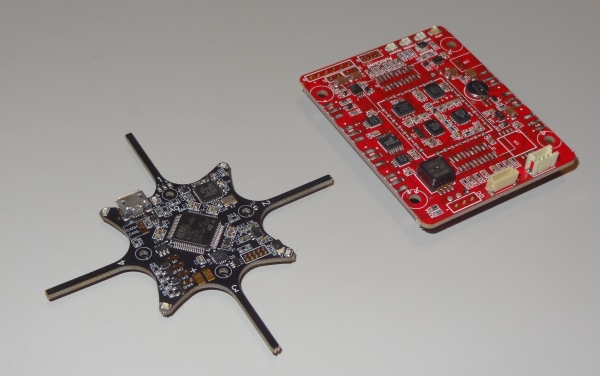
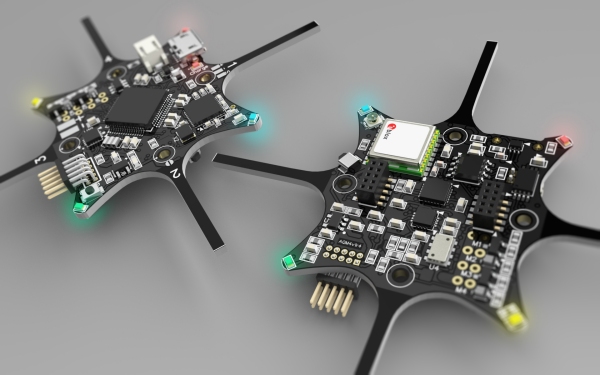
Le M4 d’AutoQuad est un contrôleur de vol de format nano. Nano, parce que la carte, prévue pour 4 moteurs, mesure un peu plus de 3,4 cm de côté (si on excepte les bras). Les bras en question peuvent servir de structure pour y placer, aux extrémités, les moteurs et leurs hélices. Ou être coupés pour gagner du poids et être remplacés par une structure plus solide. Il fait quoi, ce contrôleur de vol M4 ? Les concepteurs expliquent qu’il fonctionne avec le même code que l’AutoQuad 6, en s’appuyant sur un processur ARM7 de 32 bits ! Mais ajoute de quoi piloter 4 moteurs coreless – ceux des Ladybird, X4 et autres nano quadricoptères comme le CX-10 ! Le résultat, c’est qu’il est possible de brancher directement les moteurs sur le contrôleur de vol, l’appareil étant immédiatement opérationnel. Et c’est tout ? Non, le meilleur est à venir…
Tout d’un grand
Les dimensions de la carte électronique ne seraient pas exceptionnelles si on en restait là. Mais le contrôleur de vol M4 inclut aussi un CAN bus, un GPS Ublox et des capteurs sur 9 axes incluant un altimètre. A cela s’ajoute un récepteur radio 2,4 GHz de technologie DSM2, un connecteur USB pour assurer la charge d’une batterie Lipo 1S, un bouton d’allumage et d’extinction et un connecteur d’extension pour des composants supplémentaires. Et décrypté, ça donne quoi ? Le M4 est capable de stabiliser un multirotor comme les petits appareils du marché actuels, mais il ajoute un contrôle de la hauteur (comme les engins de chez Parrot) et, c’est beaucoup plus fort, une position GPS (en extérieur). Ce qui lui permet d’envisager toutes les fonctions normalement réservées à des appareils de plus grande taille : l’IOC (orientation « intelligente »), le RTH (retour au point de départ), le stationnaire automatique à une position déterminée… La bonne nouvelle, c’est que le tout est déjà opérationnel sur des appareils de la taille d’un Ladybird. Cela constitue ni plus ni moins qu’une étape majeure dans le petit monde des mini multirotors !
Aller plus loin
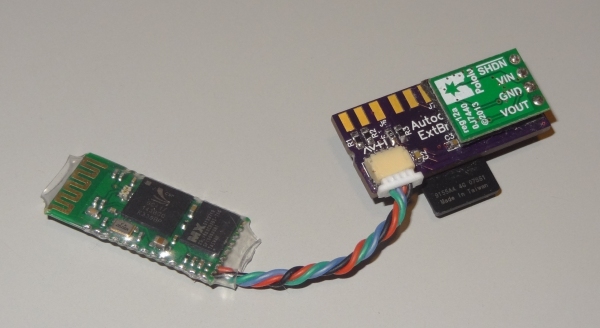
Les possibilités d’extension du M4, notamment via son port CAN bus, lui permettent de piloter jusqu’à 16 ESC. Ce qui signifie qu’il peut se trouve au cœur de multirotors dotés de 16 moteurs ! Dans ce cas, on quitte bien évidemment la notion de nano ou micro multirotors pour envisager des appareils plus volumineux – mais le cœur reste le petit contrôleur de vol M4 ! Le port d’extension permet d’ajouter des composants comme un lecteur-enregistreur de cartes mémoire microSD, un module Bluetooth, de quoi alimenter (et réguler) le courant pour alimenter ces composants… AutoQuad commercialisera le AQ Motherboard, qui permettra d’étendre facilement les possibilités du M4 à des appareils à 8 moteurs (les ESC sont compris), en ajoutant un OSD pour récupérer à distance les mesures des différents capteurs. Il est même possible d’aller jusqu’à 16 moteurs via les CAN bus.
Combien ? Pour quand ?
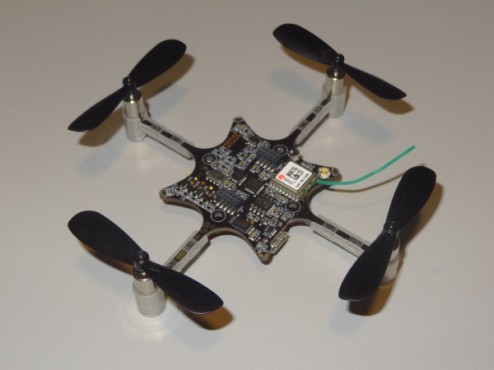
 La carte M4 est en cours d’élaboration, avec des prototypes fonctionnels déjà installés à bord de multirotors grand format et de petits quadricoptères de taille Ladybord / X4 / CX-10. Les développeurs travaillent par exemple sur l’antenne du GPS (non comprise, en tous cas pour l’instant, sur la carte) avec des premiers essais réalisés avec succès en utilisant des modèles dipôles à $1. Le M4 sera vendu avec une licence « Quatos Adaptive Controller » valable pour les appareils de loisirs et de moins de 1 kilo. Pour des appareils destinés à un usage commercial ou supérieurs à 1 kilo, il faudra souscrire à une licence un peu plus costaud. Un ordre d’idée du prix ? Ce sera environ 100 € (hors taxes) pour le contrôleur de vol M4 avec la licence basique. Il faudra compter entre 80 et 100 € pour la licence supérieure. La date de disponibilité n’a pas encore été décidée. Des kits bêta M4 en volume restreint seront disponibles à la mi-août, prêts pour être utilisés en micro quadricoptères, avec des réglages préconfigurés pour les principales combinaisons de moteurs coreless et d’hélices du marché. La production finale sera, si tout va bien, lancée à l’automne…
La carte M4 est en cours d’élaboration, avec des prototypes fonctionnels déjà installés à bord de multirotors grand format et de petits quadricoptères de taille Ladybord / X4 / CX-10. Les développeurs travaillent par exemple sur l’antenne du GPS (non comprise, en tous cas pour l’instant, sur la carte) avec des premiers essais réalisés avec succès en utilisant des modèles dipôles à $1. Le M4 sera vendu avec une licence « Quatos Adaptive Controller » valable pour les appareils de loisirs et de moins de 1 kilo. Pour des appareils destinés à un usage commercial ou supérieurs à 1 kilo, il faudra souscrire à une licence un peu plus costaud. Un ordre d’idée du prix ? Ce sera environ 100 € (hors taxes) pour le contrôleur de vol M4 avec la licence basique. Il faudra compter entre 80 et 100 € pour la licence supérieure. La date de disponibilité n’a pas encore été décidée. Des kits bêta M4 en volume restreint seront disponibles à la mi-août, prêts pour être utilisés en micro quadricoptères, avec des réglages préconfigurés pour les principales combinaisons de moteurs coreless et d’hélices du marché. La production finale sera, si tout va bien, lancée à l’automne…
Le site officiel d’AutoQuad se trouve ici.
Deux vidéos
Un quadricoptère à peine plus grand qu’un Ladybird / X4 doté des fonctions de positionnement GPS et de retour automatique au point de départ.
Un micro octocoptère de 76 grammes…


Ha super ….
Je suis convaincu qu’il existe un gros marché de carte FC miniature pour moteurs coreless et intégrand une partie radio de qualité. Là je reste un peu sur ma faim avec le DSM2… J’attendais au moins à du DSMX et je rêve d’une partie ratio FrSky ….
Dommage pas de module pour futaba… enfin uncore un achat compulsif pour l’avenir…. @ suivre
Pourquoi pas un Walkera QR SpaceWalker, 16 moteurs, follow me, et micro cam fullhd stab electro . On peut réver !
Oui génial, faudra que cela soit léger.
On se donne combien de temps pour avoir tout ça dispo ? 😉 😉
Pour le DSMX, je crois qu’il s’agit d’une histoire de licence, probablement de $$…
Leur réponse, c’est que le module DSM pour radios FrSky donne la compatibilité.
Dans la première video ce sont des moteurs d’infraX qui consomment pas loin de 2A chacun, il faut une bonne lipo Mini 600mah et du cable en 24 AWG mini et Prise JST sinon ça chauffe.
J’ai déjà testé cette config avec une carte de LB et on arrive à la limite des config cordless Puissance/poids.
Va bien y avoir moyen de coller deux spacewalker l’un sous l’autre et bidouiller tout cela. 3 mois Fred, ca te semble jouable 🙂 Histoire de pas trop te mettre la pression (oublie pas de le faire breveter au concours Lepine. Un Seize moteurs en 250 size!!!
Le prix de la licence basique, ce n’est pas plutôt 10 € (sans la carte M4) ? car sinon ça fait cher pour un Hubsan x4 ou autre micro….
Je t’avoue que je n’ai eu connaissance que de la version 100 €… Oui, c’est cher, mais d’un autre côté, aucun X4/Ladybird-like ne dispose de GPS et de RTH. A part les Galaxy Visitor II/III, mais ça fonctionne… différemment 🙂
Ah ben si c’est moi qui fais, c’est pas gagné-gagné… Concours Lépine dans le pied, avec moi, c’est tout vu. Il vaut mieux que je sois spectateur et que je laisse faire les spécialistes 🙂 🙂
Damned. J’ose espérer que ce sont de vieux protos 🙂 🙂
le gros problème du coreless, c’est que les moteurs ont une vie courte.
Au point que ça devient des consommables.
Je pense que ça limitera leur utilisation à des « jouets ».
Il sera difficile de vendre une config chère, avec super GPS, super récepteur, super CC, super radio et batterie d’enfer si il faut changer les moteurs tous les mois!
A moins que les constructeurs arrivent à nous fournir des coreless avec la fiabilité et la durabilité des brushless: on gagnera en poids pour la même puissance!
Très juste !
En fait, je verrais bien une bestiole de la taille du 200QX de HHobby, avec des brushless…
Il reste à espérer une Mobius qui filme en 60fps 4K pour produire au final une vidéo stabilisée 1080p sans nacelle 😉
WTF !
J’adore. Mais c’est super léger pour être dehors, il va vider la batterie rien que pour se stabiliser J
Pas faux….. mais le MTBF est quand même pas si nul que ca… surtout par rapport à des moteurs à charbon à corps (je pense aux moteurs des V262 et consors). Pour l’instant je n’ai grillé que deux moteurs coreless sur l’arsenal de quads à moteurs coreless dont je dispose.
Dans le même registre, il y a un kit ultra light en brushless qui est à 60g …
Sinon, pour aller dans ton sens, si ca reste dans les jouets, le projet « bradwii » peut être une super alternative