Leonardo : le robot de Caltech qui marche, vole, fait de la slackline et du skateboard
 Une équipe de l’université de California Institute of technology (Caltech) a développé un robot appelé Leonardo. L’acronyme de LEgs ONboARD drOne : il s’agit d’un appareils bipède (« legs », les jambes) avec un drone à bord (« onboard drone »). Il dispose donc de deux méthodes de déplacement : la marche avec deux jambes animées par 3 servos chacune et le vol avec 4 moteurs et hélices !
Une équipe de l’université de California Institute of technology (Caltech) a développé un robot appelé Leonardo. L’acronyme de LEgs ONboARD drOne : il s’agit d’un appareils bipède (« legs », les jambes) avec un drone à bord (« onboard drone »). Il dispose donc de deux méthodes de déplacement : la marche avec deux jambes animées par 3 servos chacune et le vol avec 4 moteurs et hélices !
Multimodal…
 Les deux moyens de locomotion fonctionnent simultanément, puisque Leonardo a besoin de l’aide de la fonction drone pour tenir d’aplomb, avec les moteurs toujours en rotation. Selon l’équipe de Caltech, il faudra réaliser des jambes plus rigides et capables de porter le poids du robot pour qu’il s’affranchisse de la fonction drone pendant la marche. Cela permettra de réduire la consommation énergétique.
Les deux moyens de locomotion fonctionnent simultanément, puisque Leonardo a besoin de l’aide de la fonction drone pour tenir d’aplomb, avec les moteurs toujours en rotation. Selon l’équipe de Caltech, il faudra réaliser des jambes plus rigides et capables de porter le poids du robot pour qu’il s’affranchisse de la fonction drone pendant la marche. Cela permettra de réduire la consommation énergétique.
Les bénéfices de la fonction drone ?
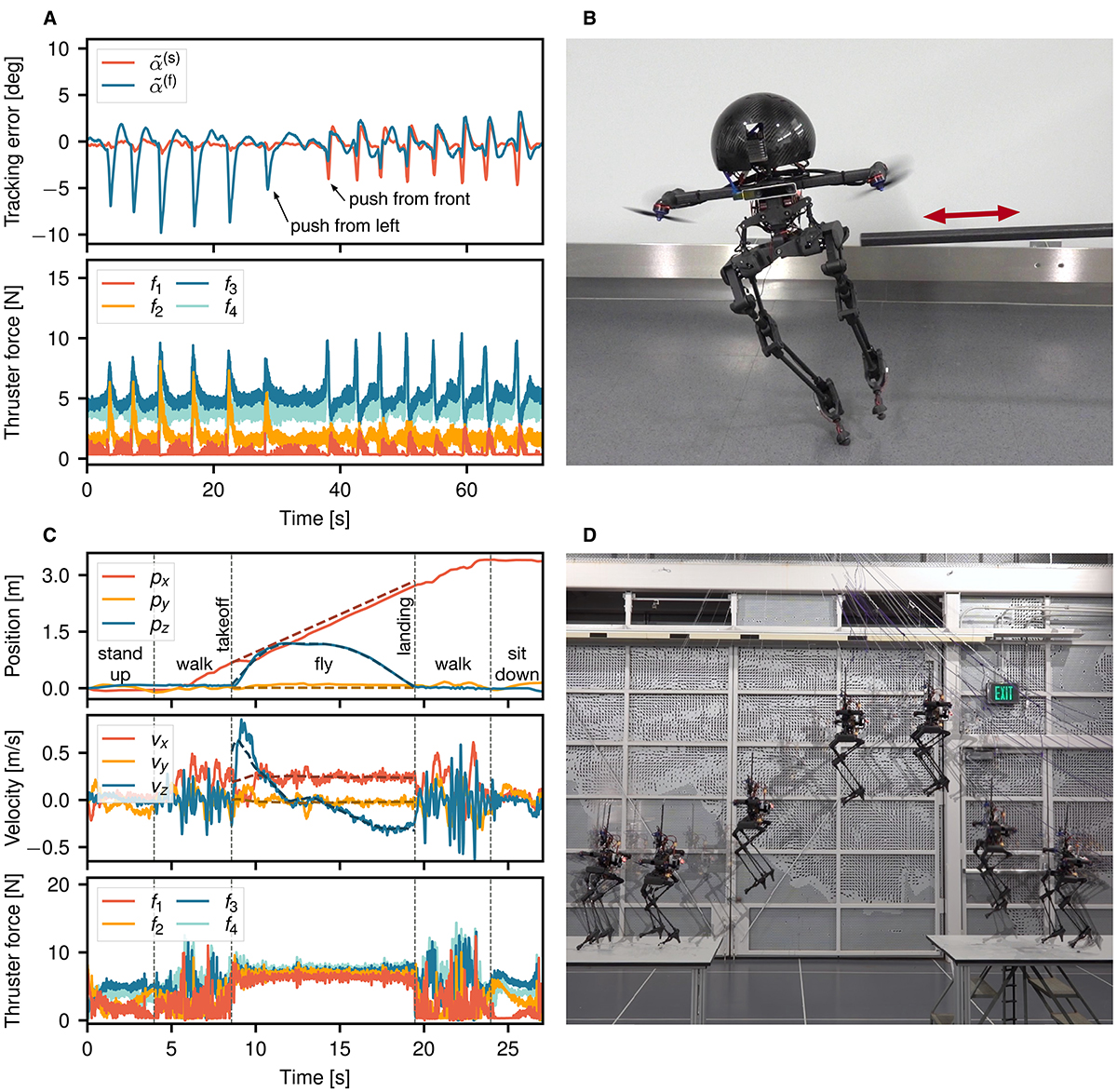
L’asservissement actuel à l’usage des hélices a été transformé en avantage par l’équipe de Caltech ! « Avec l’aide des hélices, même si vous poussez Leonardo assez fort dans le but de le déséquilibrer, il sait rester tenir sans se renverser », assure l’étudiante Elena-Sorina Lupu, co-autrice avec Alireza Ramezani d’un rapport publié dans Science Robotics. La fonction drone permet à Leonardo de décoller et voler pour s’affranchir d’obstacles trop complexes ! Ou de pratiquer des activités plus exotiques comme la slackline ou le skateboard. Ce sont des » preuves de concept » pour de futurs robots placés dans des environnements difficiles : il est capable de sauter d’un obstacle situé en hauteur, de tenir face à un vent fort, de rester en équilibre sur une surface en pente, glissante, ou mouvante…
La suite de Leonardo ?
 L’équipe de Caltech envisage d’ajouter des capacités décisionnelles à Leonardo basé sur un moteur AI. Par exemple pour qu’il soit en mesure de déterminer tout seul s’il doit et peut passer en mode volant en mesurant sa charge utile, en évaluant l’environnement, en optimisant la consommation d’énergie et en tenant compte de ses précédentes expériences. Les détails du projet Leonardo se trouvent dans cet article publié sur ScienceRobotics.
L’équipe de Caltech envisage d’ajouter des capacités décisionnelles à Leonardo basé sur un moteur AI. Par exemple pour qu’il soit en mesure de déterminer tout seul s’il doit et peut passer en mode volant en mesurant sa charge utile, en évaluant l’environnement, en optimisant la consommation d’énergie et en tenant compte de ses précédentes expériences. Les détails du projet Leonardo se trouvent dans cet article publié sur ScienceRobotics.


Il y à eu un concept similaire avec des ballons :
https://spectrum.ieee.org/ballu-uclas-humanoid-blimp-robot
L’avantage des hélices c’est qu’on peut les piloter.
Ca me plairait bien construire un hybride robot terrestre + VTOL.
Ardupilot est un excellent candidat pour une telle réalisation :
https://discuss.ardupilot.org/t/allowing-ardupilot-to-interact-with-a-multi-legs-robot/33917
Génialissime !
@JPH on a réalisé une première version de robot marcheur sous ArduPilot l’année dernière https://ardupilot.org/rover/docs/walking-robots.html
Intéressant mais l’autonomie doit être désastreuse