MIT : un algorithme pour optimiser le parcours d’un drone en présence d’obstacles
 Une équipe du département Department of Aeronautics and Astronautics du Massachusetts Institute of Technology (MIT) publié une étude portant sur l’optimisation d’un vol de quadricoptère. Le principe de leurs travaux réside dans une modélisation des conditions de vol basée sur une approche analytique et une simulation. L’équipe du MIT a noté que cela ne suffisait pas pour obtenir des réactions efficaces, surtout lorsque les vols sont rapides et mettent en difficulté le matériel, comme la réactivité des commandes ou la capacité de la batterie à fournir des pics d’efforts.
Une équipe du département Department of Aeronautics and Astronautics du Massachusetts Institute of Technology (MIT) publié une étude portant sur l’optimisation d’un vol de quadricoptère. Le principe de leurs travaux réside dans une modélisation des conditions de vol basée sur une approche analytique et une simulation. L’équipe du MIT a noté que cela ne suffisait pas pour obtenir des réactions efficaces, surtout lorsque les vols sont rapides et mettent en difficulté le matériel, comme la réactivité des commandes ou la capacité de la batterie à fournir des pics d’efforts.
La solution ?
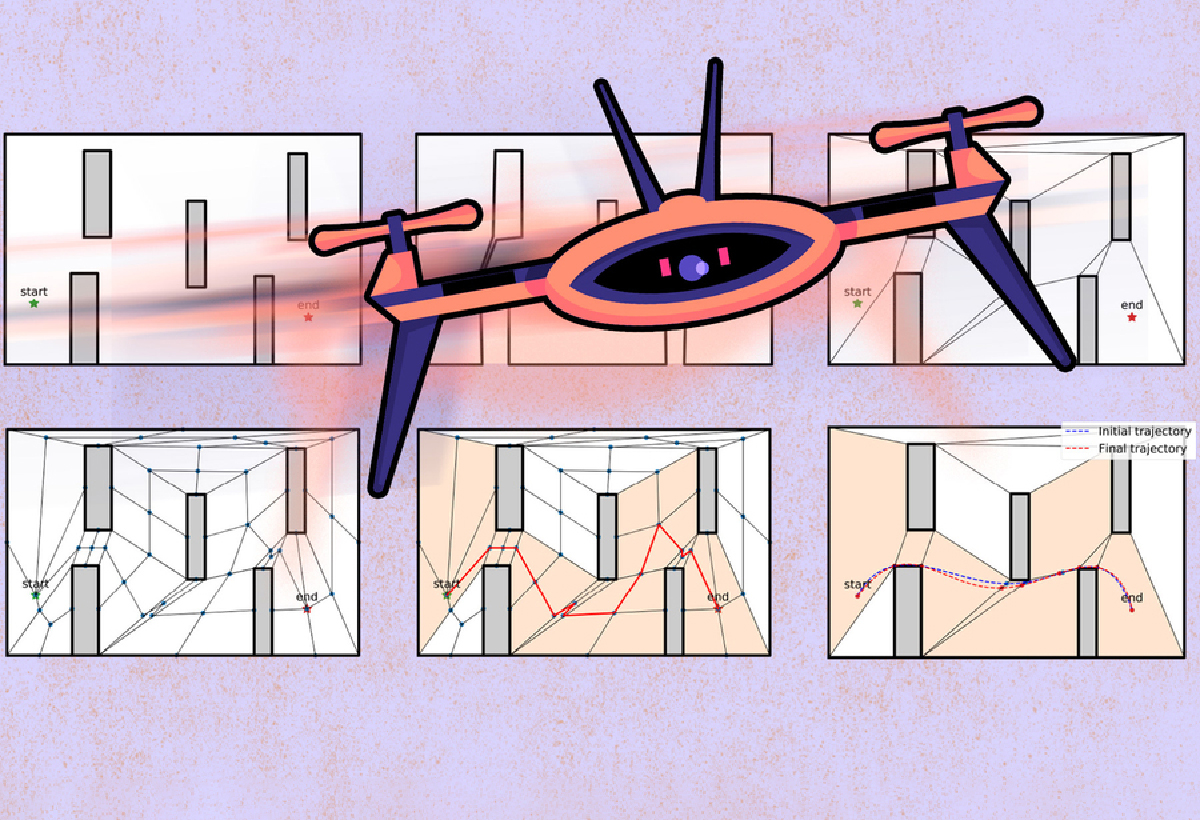
L’algorithme élaboré par l’équipe s’appuie sur la numérisation des comportements observés dans des situations de vol réelles. Il envisage ensuite de nombreux scénarios pour optimiser la trajectoire, en tenant compte du plus de paramètres possible. Les scénarios pour lesquels le risque de crash est jugé trop élevé sont écartés, tout comme ceux qui ne permettent pas un gain en fin de vol. 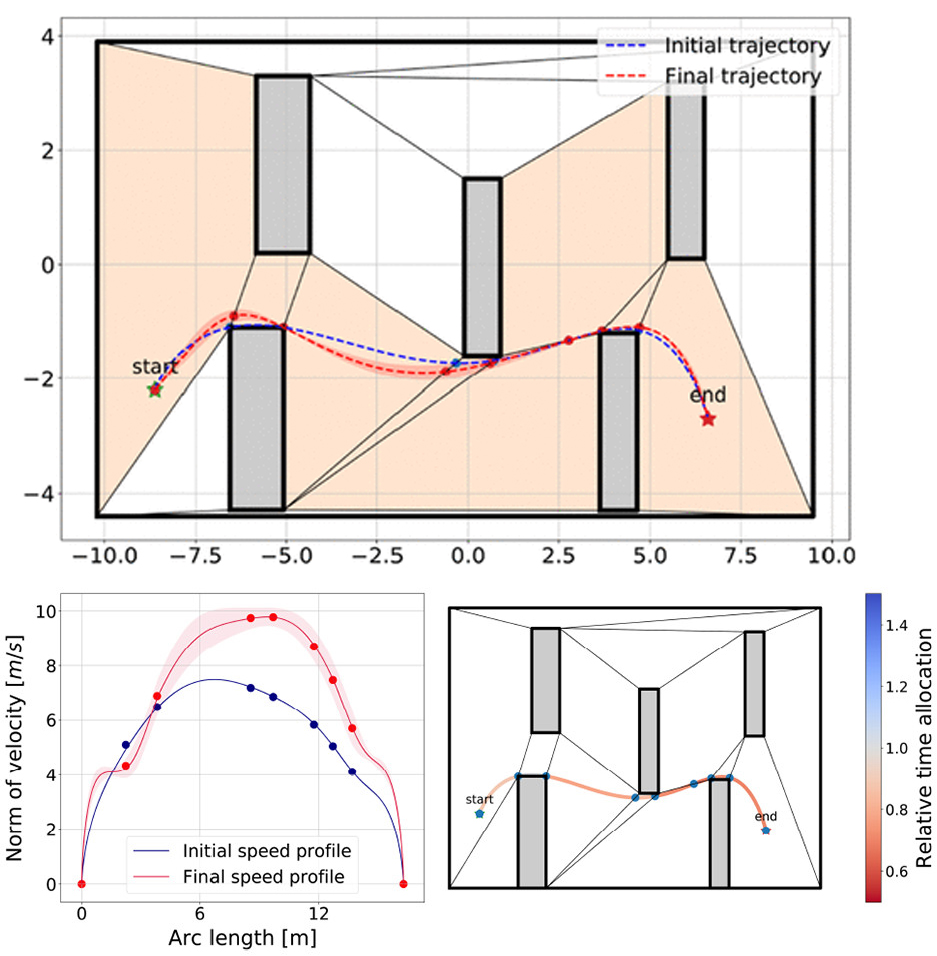 L’équipe a noté que, souvent, le drone animé par leur algorithme restait en retrait pendant une partie du vol par rapport à celui reposant sur une méthode plus classique, mais pour le dépasser avant l’arrivée. Le gain est estimé à 20 % par rapport à des méthodes de création de plans de vol traditionnelles.
L’équipe a noté que, souvent, le drone animé par leur algorithme restait en retrait pendant une partie du vol par rapport à celui reposant sur une méthode plus classique, mais pour le dépasser avant l’arrivée. Le gain est estimé à 20 % par rapport à des méthodes de création de plans de vol traditionnelles.
Approche globale
Selon Ezra Tal, un étudiant de l’équipe du MIT, « à haute vitesse, il existe une aérodynamique complexe qui est difficile à simuler. Nous utilisons donc des expériences faites dans le monde réel pour compléter le modèle. Cela nous permet de déterminer, par exemple, qu’il est parfois préférable de ralentir d’abord pour être plus rapide plus tard. C’est cette approche holistique que nous utilisons pour voir comment nous pouvons déterminer une trajectoire aussi rapide que possible ». Le pilotage automatique de racers progresse rapidement, comme l’avaient déjà démontré les équipes de l’ETH et UZH de Zürich.
Source : La publication « Multi-fidelity black-box optimization for time-optimal quadrotor maneuvers » sur SAGE publishing
Crédits visuels : MIT News, with background figure courtesy of the researchers


Pourquoi se focaliser sur les racers ? (pour autant qu’il y est une définition de ce que c’est). On peut faire des multirotors de grande tailles avec les mêmes caractéristiques dynamiques …
@khancyr
Peut être que parce que si ils y arrivent avec des racers, c’est facilement transposable à d’autre aéronefs telepilotés, et pas l’inverse.
@Skydingo: défini racer ? c’est juste un multirotors comme un autre … Le papier ne fait pas mention de racer mais seulement de multirotors, c’est Fred qui à rajouté la mention racer, d’ou ma remarque !
Et non, ce qui est faisable sur un micro drone n’est pas directement transposable sur une taille plus grande !
@ khancyr : La mention aux racers concerne les ETH et UZH Zürich, dans une étude qui concerne les racers…