Des drones racers en pilotage automatique
 Les figures de freestyle vont-elles rester le privilège des pilotes expérimentés qui ont passé beaucoup de temps à l’entrainement ? Pas si sûr. Le laboratoire Robotics and Perception Group de l’université de Zürich, le célèbre ETH, a publié un article intitulé « Deep Drone Acrobatics » et une vidéo en illustration.
Les figures de freestyle vont-elles rester le privilège des pilotes expérimentés qui ont passé beaucoup de temps à l’entrainement ? Pas si sûr. Le laboratoire Robotics and Perception Group de l’université de Zürich, le célèbre ETH, a publié un article intitulé « Deep Drone Acrobatics » et une vidéo en illustration.
Le sujet ?
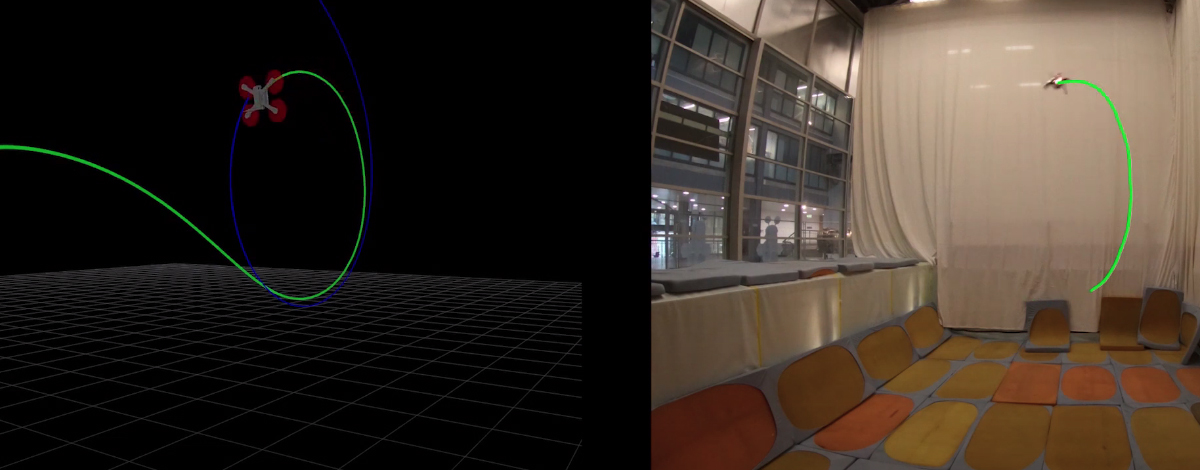
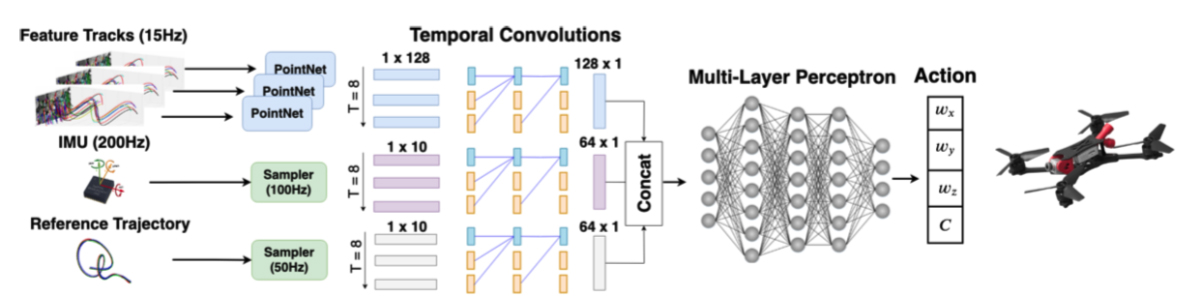
Les chercheurs de l’ETH Zürich ambitionnent de proposer des drones capables de réaliser des figures de freestyle de manière autonome, sans besoin de pilote(r). L’approche de cette étude est très intéressante : les figures sont entièrement réalisées sur un simulateur de vol (Gazebo) pour un déploiement dans la réalité qui ne demande aucun ajustement.  Contrairement à de nombreux projets de laboratoire, il n’y a pas besoin d’un matériel externe qui filme le drone pour des évolutions basées sur le motion tracking. Les Deep Drone Acrobatics reposent uniquement sur les capteurs de bord et sur la caméra frontale – exactement comme pour un pilote humain. Le contrôleur de vol a été pensé pour utiliser en simultané les données en provenance des capteurs et de la caméra, selon des techniques de sensori-moteur. L’intégralité du document est disponible pour ceux qui voudraient en savoir plus sur les techniques utilisées dans ce projet.
Contrairement à de nombreux projets de laboratoire, il n’y a pas besoin d’un matériel externe qui filme le drone pour des évolutions basées sur le motion tracking. Les Deep Drone Acrobatics reposent uniquement sur les capteurs de bord et sur la caméra frontale – exactement comme pour un pilote humain. Le contrôleur de vol a été pensé pour utiliser en simultané les données en provenance des capteurs et de la caméra, selon des techniques de sensori-moteur. L’intégralité du document est disponible pour ceux qui voudraient en savoir plus sur les techniques utilisées dans ce projet.
FPV racing autonome ?
 A noter que l’ETH Zürich est à la recherche d’étudiants doctorants en robotique, et plus particulièrement pour un projet de FPV racers autonomes. Le sujet est excitant, et le challenge peut fort logiquement conduire à de belles avancées dans le domaine de la robotique avec des prises de décision pour lesquelles la latence est critique. Si vous êtes intéressé, vous pouvez postuler ici…
A noter que l’ETH Zürich est à la recherche d’étudiants doctorants en robotique, et plus particulièrement pour un projet de FPV racers autonomes. Le sujet est excitant, et le challenge peut fort logiquement conduire à de belles avancées dans le domaine de la robotique avec des prises de décision pour lesquelles la latence est critique. Si vous êtes intéressé, vous pouvez postuler ici…
Source : Robotics and Perception Group et le Github du projet


tout a fait ce qu’il me faut vu mon niveau de pilotage 🙂
impeccable pour faire le kéké devant tout le monde!!
+1 Adblock , mais ils sont trop forts à Zurich ?
là on rentre dans un autre monde , pour m’interresser un peu au sujet sans non plus avoir rentrer dans les détail , derrière c’est costaud (précision des MEMS , video en stereoscopie ,algorythme derriére dédié , NUC puissant derrière ! ) le sujet et vaste !
Il y va y avoir du controle anti dopage logiciel lors des prochaines competitions de racer 😉
@ Ellie : MDR 🙂
hum … deux petites corrections : le lien pour le simulateur Gazebo est http://gazebosim.org/ . ça n’appartient pas à px4 … il y a d’ailleurs des plugins pour les autres stacks de vol comme ArduPilot et Betaflight !
« un déploiement dans la réalité qui ne demande aucun ajustement » Pas vrai du tout ! Il reste des jolies gap entre les modèles sous Gazebo et les modèles réelles ! La transition n’est pas directe pour les paramétrages. Après pour le code, pour peu qu’on est une simulation Software In The Loop correct (type px4, ardupilot) le code simulé est quasiement le même que celui qui vol donc pas de problème.
@ khancyr : J’avais le lien donné par l’université, j’ai corrigé avec ton lien, thxxx.
Pour le déploiement sans ajustement, ce sont eux qui l’affirment, ils semblent baser une partie de leur projet là-dessus. J’espère pour eux que c’est vrai 😎
En réalité, cette mention est très académique. Il n’est pas rare de voir des publications basé sur des simulations qui sont très loin du monde réel et donc avec un portage simulation – test qui sera long. Dans le cas de ces travaux le passage de la simulation au réel est facilité tant par Gazebo que par la simulation px4 puisque le code de la simulation est quasiment le même que celui qui sera embarqué !
De plus, leur travaux portent sur de la génération de trajectoire et d’attitude, ces résultats sont normalement indépendant du drone (dans le sens ou n’importe quel drone ayant la puissance nécessaire pour effectuer les figures pourra le faire) et donc exploitable directement.
Ainsi, Gazebo n’aide quasiment en rien au passage simulations – réel. Ils auraient utilisé AirSim ou juste px4 SITL, le résultat serait le même. Sauf pour la publication ou un simulateur de référence comme Gazebo permet a tout le monde de savoir quelles sont les modèles et limites de la simulation.
Ce n’est en rien une critique de leur résultats de ma part, c’est juste la formulation sur l’utilisation de Gazebo qui mérite un petit ajustement pour les non académique. Gazebo est un simulateur complex en fonction des résultats qu’on souhaite obtenir, il y a des alternatives plus simple de mise en œuvre et qui donneront des résultats tout aussi bon!
@ khancyr : Thxxxx pour les (nécessaires) explications 🙂