DuoCopter, le projet
 Vous connaissez les quadricoptères, les hexa, les octo, les tri, et même les mono. Imaginé par Dirk Brunner, le DuoCoper est un engin qui vole avec… deux demi hélices (ou deux pales séparées). Comment ça fonctionne ? La magie de l’appareil repose sur l’algorithme de contrôle de la vitesse de rotation des deux moteurs. Pour faire simple, cette vitesse est modifiée à chaque rotation. La différence de vitesse entre les deux demi hélices génère une poussée dans une direction. Pour assurer la stabilité, chaque demi hélice est équipée d’un contrepoids.
Vous connaissez les quadricoptères, les hexa, les octo, les tri, et même les mono. Imaginé par Dirk Brunner, le DuoCoper est un engin qui vole avec… deux demi hélices (ou deux pales séparées). Comment ça fonctionne ? La magie de l’appareil repose sur l’algorithme de contrôle de la vitesse de rotation des deux moteurs. Pour faire simple, cette vitesse est modifiée à chaque rotation. La différence de vitesse entre les deux demi hélices génère une poussée dans une direction. Pour assurer la stabilité, chaque demi hélice est équipée d’un contrepoids.
Pour quoi faire ?
Le concepteur, qui a créé une entité appelée ResearchDrone, assure que la technique assure une plus grande efficacité 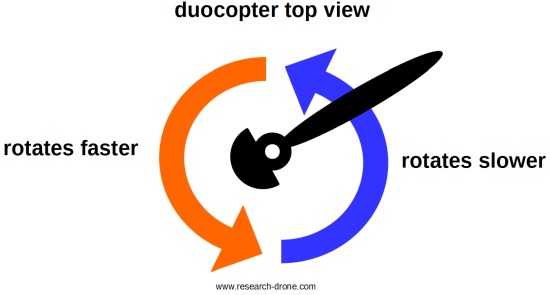 en réduisant la surface sous les hélices, en limitant le nombre de composants, en limitant le bruit, en augmentant la robustesse, en réduisant les coûts, en évitant que les hélices n’apparaissent sur l’image d’une caméra, en réduisant la surface sensible au vent, en augmentant la portance en vol rapide. Il propose une licence de sa technologie pour les industriels qui voudraient l’utiliser dans leurs réalisations… Le site officiel du DuoCopter se trouve ici.
en réduisant la surface sous les hélices, en limitant le nombre de composants, en limitant le bruit, en augmentant la robustesse, en réduisant les coûts, en évitant que les hélices n’apparaissent sur l’image d’une caméra, en réduisant la surface sensible au vent, en augmentant la portance en vol rapide. Il propose une licence de sa technologie pour les industriels qui voudraient l’utiliser dans leurs réalisations… Le site officiel du DuoCopter se trouve ici.
Crédits photos : Dirk Brunner.


Ca fait un bail que les hélices monopales existent. Quand j’étais gamin, elles étaient utilisées sur les avions RC pour les racers qui cherchaient vitesse pure, notamment en vol circulaire. Chaque pale étant aérodynamiquement perturbée par le passage de la pale précédente, sur plus la vitesse de rotation augmente, plus la monopale est intéressante.
Ce n’est pas que le sillage de la première pale sur la deuxième qui est problématique. Mais la traînée induite de chaque pale. Plus il y a de pales moins le rendement est bon au global car on rajoute les pertes par pale.
Du coup, le meilleur rendement reste la monopale.. Mais il en résulte qu’il existe un déséquilibre dynamique puisque la poussée sur une pale produit un moment, ce qui permet alors le contrôle du drone présenté. 🙂
Et pour l’argument présenté dans la vidéo sur la capacité aérodynamique de pouvoir se servir de la portance dans le cas du vol d’avancement, au contraire d’un multirotor classique. C’est exactement ce que je mets en oeuvre pour mon modèle UpStartDrone. 🙂
https://www.youtube.com/watch?v=dBNUapM4_G8