Projet SUWAVE
SUWAVE est un concept imaginé par une équipe francophone de l’université de Sherbrooke au Québec. SUWAVE signifie Sherbrooke University Air-Water VEhicle. Le principe ? C’est un appareil radiocommandé de type aile volante capable de décoller et atterrir sur l’eau.  Une idée intéressante sachant que les ailes doivent prendre de l’élan pour décoller, soit en étant lancées à la main, soit en étant propulsées sur une rampe.
Une idée intéressante sachant que les ailes doivent prendre de l’élan pour décoller, soit en étant lancées à la main, soit en étant propulsées sur une rampe.
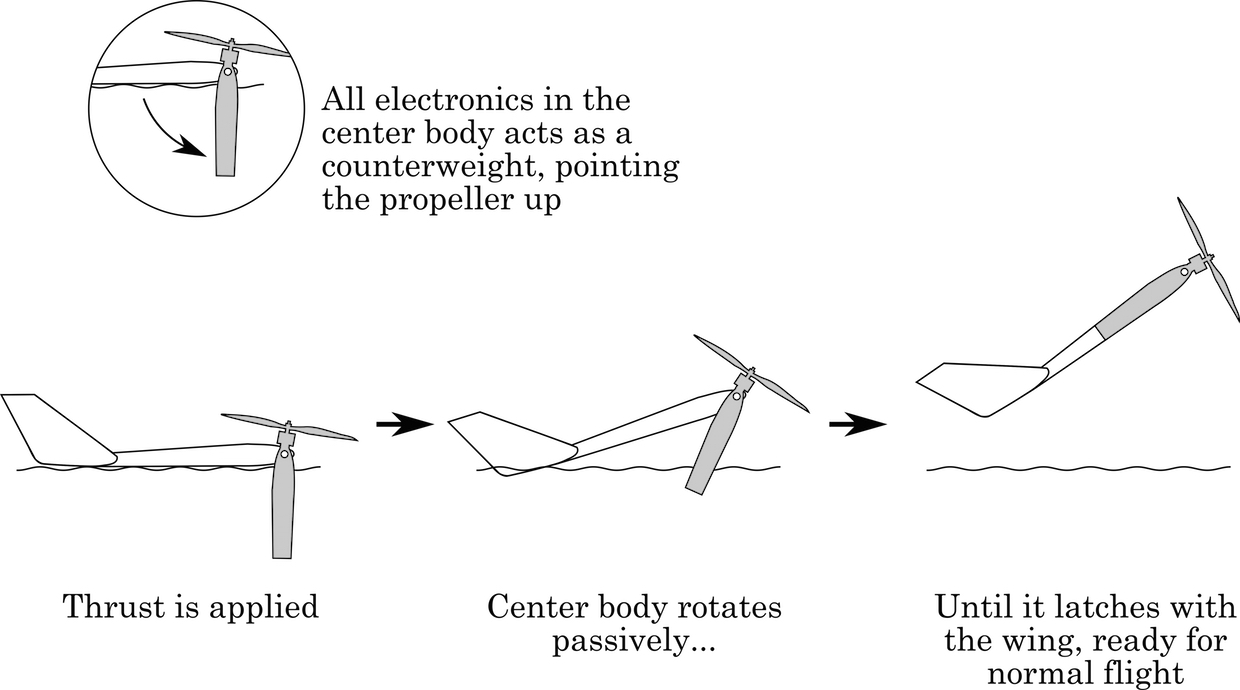
Comment ça fonctionne ?
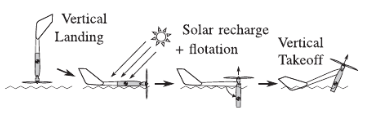
L’hélice unique à l’avant du SUWAVE est montée sur une charnière et son orientation contrôlée à distance. Lorsque l’aile est sur l’eau, à plat, elle flotte. L’hélice est placée à la verticale. Lorsqu’elle tourne, elle soulève l’avant de l’aile et l’extrait de l’eau. Le support de l’hélice pivote progressivement pour aller se placer à l’horizontale, adoptant alors le comportement classique d’une aile volante. Pour se poser, l’aile peut descendre à plat sur la surface de l’eau. Mais les scientifiques ont travaillé pour renforcer la structure de telle manière à ce que l’aile puisse tomber à la verticale dans l’eau, remonter et flotter, sans dommages. Le prototype opérationnel est un engin de 584 grammes capable de supporter des décélérations de 15G.
Oui mais…
 Que se passe-t-il si l’aile se trouve sur le dos, dans l’eau ? En utilisant la même méthode que celle du décollage, elle peut se retourner. L’équipe universitaire indique s’être inspirée de la manière de s’extraire de l’eau telle que pratiquée par le canard colvert (canard mallard au Canada)… Le pari un peu fou du SUWAVE, c’est d’être en mesure de traverser le Québec du nord vers le sud, soit une distance de 1900 km, sans intervention humaine autre que de la programmation de l’itinéraire.
Que se passe-t-il si l’aile se trouve sur le dos, dans l’eau ? En utilisant la même méthode que celle du décollage, elle peut se retourner. L’équipe universitaire indique s’être inspirée de la manière de s’extraire de l’eau telle que pratiquée par le canard colvert (canard mallard au Canada)… Le pari un peu fou du SUWAVE, c’est d’être en mesure de traverser le Québec du nord vers le sud, soit une distance de 1900 km, sans intervention humaine autre que de la programmation de l’itinéraire.
Sauts de puce
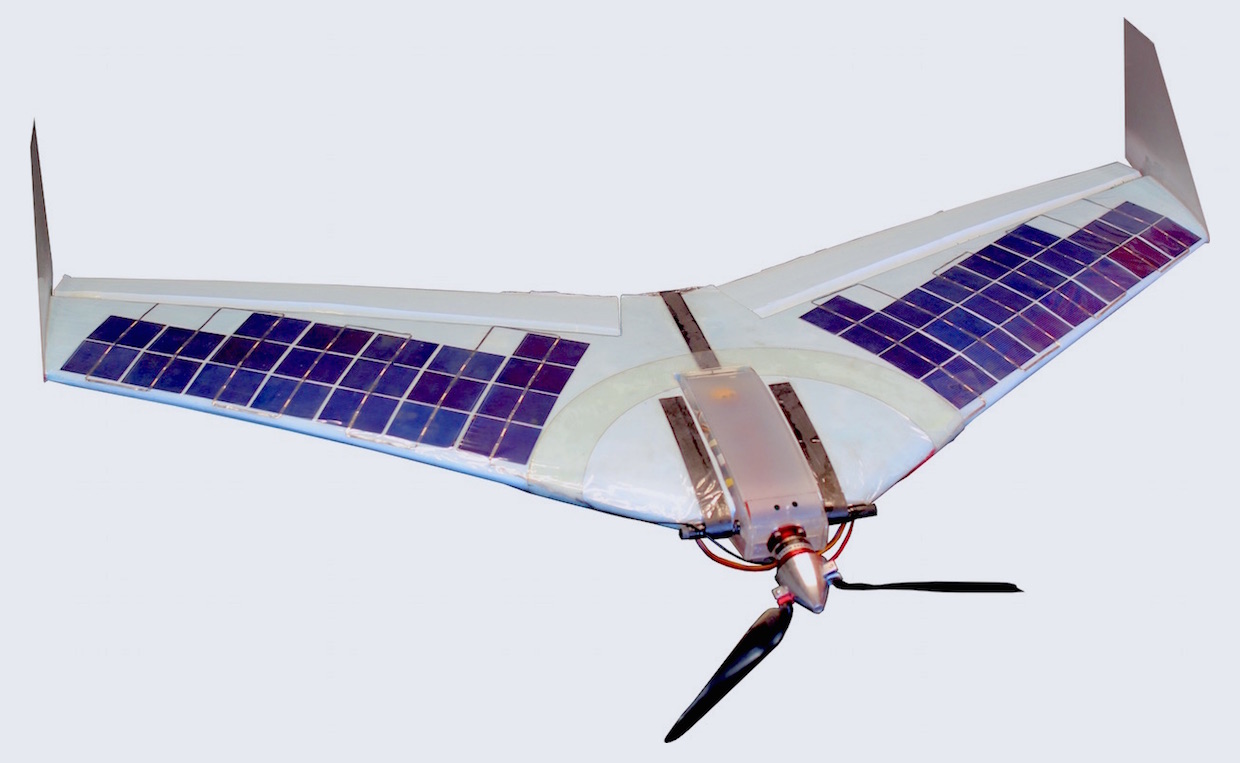 L’équipe a démontré qu’il suffisait d’une autonomie de 20 km pour y parvenir, en pratiquant des sauts de puce de lacs en lacs. Avec le SUWAVE, pas besoin d’équipements spéciaux pour décoller et atterrir, pas besoin de capteurs coûteux pour réussir des approches ultra précises comme avec un drone classique. Le risque de manque de précision de l’atterrissage est pris en compte. La traversée requiert plus de 100 vols qui épuisent la batterie à chaque fois. Comment la recharger ? L’université de Sherbrooke a ajouté des panneaux solaires sur l’extrados (le dessus de l’aile). La recharge est lente, mais peu importe : pendant ce temps, l’aile flotte dans l’eau.
L’équipe a démontré qu’il suffisait d’une autonomie de 20 km pour y parvenir, en pratiquant des sauts de puce de lacs en lacs. Avec le SUWAVE, pas besoin d’équipements spéciaux pour décoller et atterrir, pas besoin de capteurs coûteux pour réussir des approches ultra précises comme avec un drone classique. Le risque de manque de précision de l’atterrissage est pris en compte. La traversée requiert plus de 100 vols qui épuisent la batterie à chaque fois. Comment la recharger ? L’université de Sherbrooke a ajouté des panneaux solaires sur l’extrados (le dessus de l’aile). La recharge est lente, mais peu importe : pendant ce temps, l’aile flotte dans l’eau.
Challenge !
 Il reste des aspects techniques à maîtriser, notamment l’éventuelle présence d’eau dans le moteur brushless pendant une longue durée, la faculté à se repositionner sur un lac en cas de dérive vers les berges pour être en mesure de redécoller convenablement. Il faut aussi s’assurer que la structure est en mesure de subir des atterrissages durs à répétition. A quoi tout cela peut-il servir ? On peut imaginer de tels drones totalement autonomes parcourir les vastes étendues québécoises pour détecter des départs d’incendie – la hantise du ministère de la santé publique en période estivale. Le résultat des recherches des universitaires de Sherbrooke est disponible dans un document publié sur le site de l’IEEE (payant).
Il reste des aspects techniques à maîtriser, notamment l’éventuelle présence d’eau dans le moteur brushless pendant une longue durée, la faculté à se repositionner sur un lac en cas de dérive vers les berges pour être en mesure de redécoller convenablement. Il faut aussi s’assurer que la structure est en mesure de subir des atterrissages durs à répétition. A quoi tout cela peut-il servir ? On peut imaginer de tels drones totalement autonomes parcourir les vastes étendues québécoises pour détecter des départs d’incendie – la hantise du ministère de la santé publique en période estivale. Le résultat des recherches des universitaires de Sherbrooke est disponible dans un document publié sur le site de l’IEEE (payant).
Source : sUAS News
Crédits photos : University of Sherbrooke

Et là, une aile volante de surveillance se crash dans les bois, la lipo explose, l’incendie ravage les plaines ! 😀
Bon, ok, je range mon sarcasme 😛
L’idée est sympa 🙂
Je suis le seul à remarquer que ce drone de surveillance n’a pas de caméra ? lol
Et avec une hélice à l’avant + l’eau + plaque solaire…Ça risque d’être très tendu pour en installer une.
Encore une idée qui va prendre l’eau 🙂
@ FPV_67 : Je ne te félicite pas sur celle-là 🙂
Absolument génial dans le principe !