Smart 190, le test
Premier décollage
 Le contrôleur de vol est flashé avec OpenPilot, et pré-réglé pour ne rien à avoir à faire d’autre que de paramétrer les voies de la radiocommande, l’armement, et un interrupteur pour le mode de vol. Sans oublier le failsafe, pour ne pas avoir la désagréable surprise de voir la machine partir loin en cas de perte de connexion radio. Une fois que tous les réglages sont faits et vérifiés, il est temps de remettre les hélices, des modèles 4040 de type Bullnose, de marque King Kong. La batterie est une Lipo 3S 11,1V de 850 mAh. Le Smart 190 décolle sans effort, et on parvient à le stabiliser très facilement, quelque soit le mode de vol. L’appareil a tout de même tendance à gigoter, très peu en intérieur, plus en extérieur, et vraiment beaucoup lorsqu’il y a du vent ou en prise de vitesse.
Le contrôleur de vol est flashé avec OpenPilot, et pré-réglé pour ne rien à avoir à faire d’autre que de paramétrer les voies de la radiocommande, l’armement, et un interrupteur pour le mode de vol. Sans oublier le failsafe, pour ne pas avoir la désagréable surprise de voir la machine partir loin en cas de perte de connexion radio. Une fois que tous les réglages sont faits et vérifiés, il est temps de remettre les hélices, des modèles 4040 de type Bullnose, de marque King Kong. La batterie est une Lipo 3S 11,1V de 850 mAh. Le Smart 190 décolle sans effort, et on parvient à le stabiliser très facilement, quelque soit le mode de vol. L’appareil a tout de même tendance à gigoter, très peu en intérieur, plus en extérieur, et vraiment beaucoup lorsqu’il y a du vent ou en prise de vitesse.  Il faut sans douter tenter de modifier quelques réglages dans les PID… Mais l’appareil se comporte plutôt bien et vole suffisamment rapidement pour éprouver de belles sensations de FPV racing, au ras du sol ou à frôler les arbres. Ce n’est pas un monstre de puissance, mais il permet tout de même de très beaux vols.
Il faut sans douter tenter de modifier quelques réglages dans les PID… Mais l’appareil se comporte plutôt bien et vole suffisamment rapidement pour éprouver de belles sensations de FPV racing, au ras du sol ou à frôler les arbres. Ce n’est pas un monstre de puissance, mais il permet tout de même de très beaux vols.
Bip bip
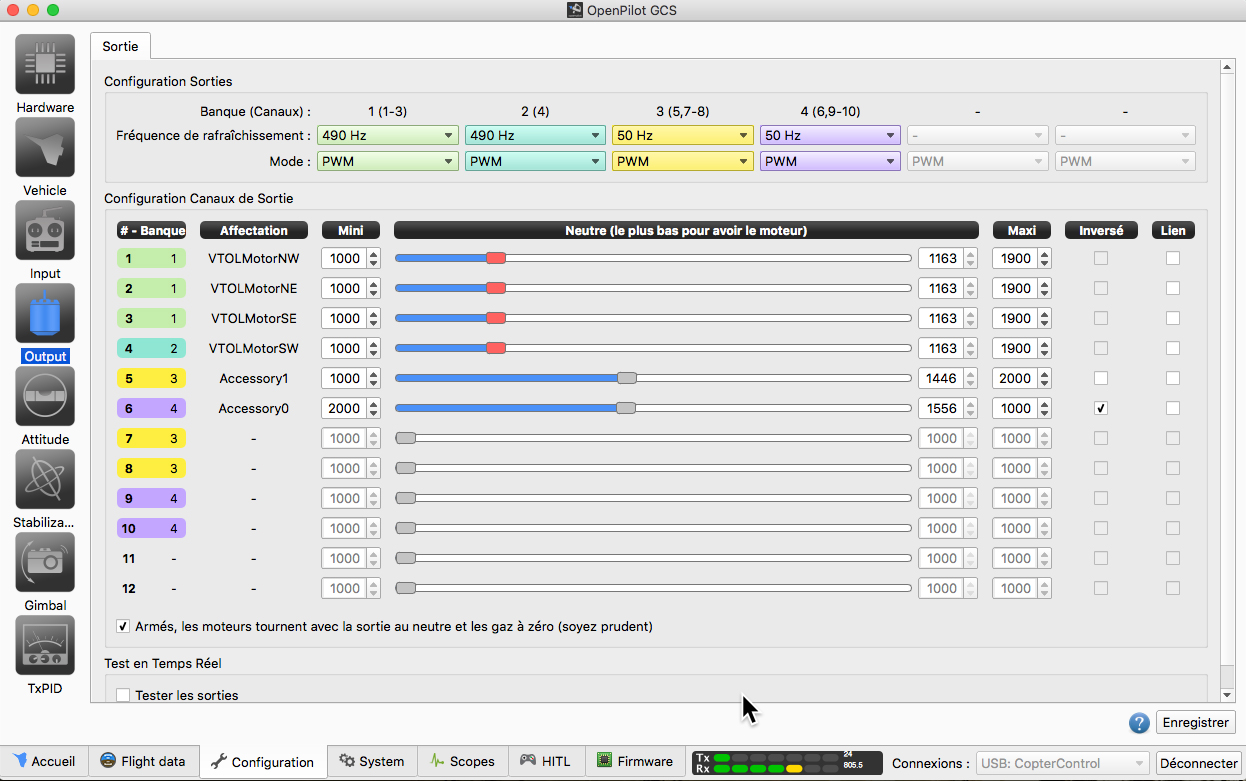
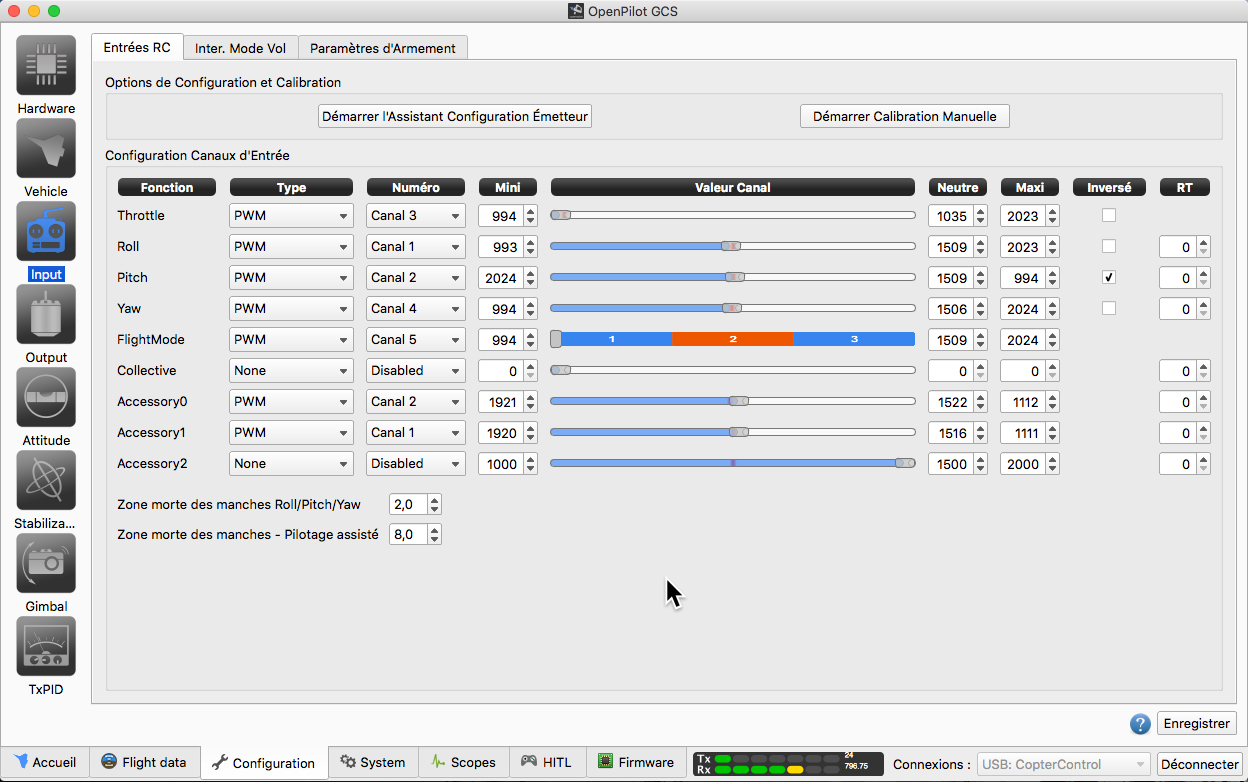
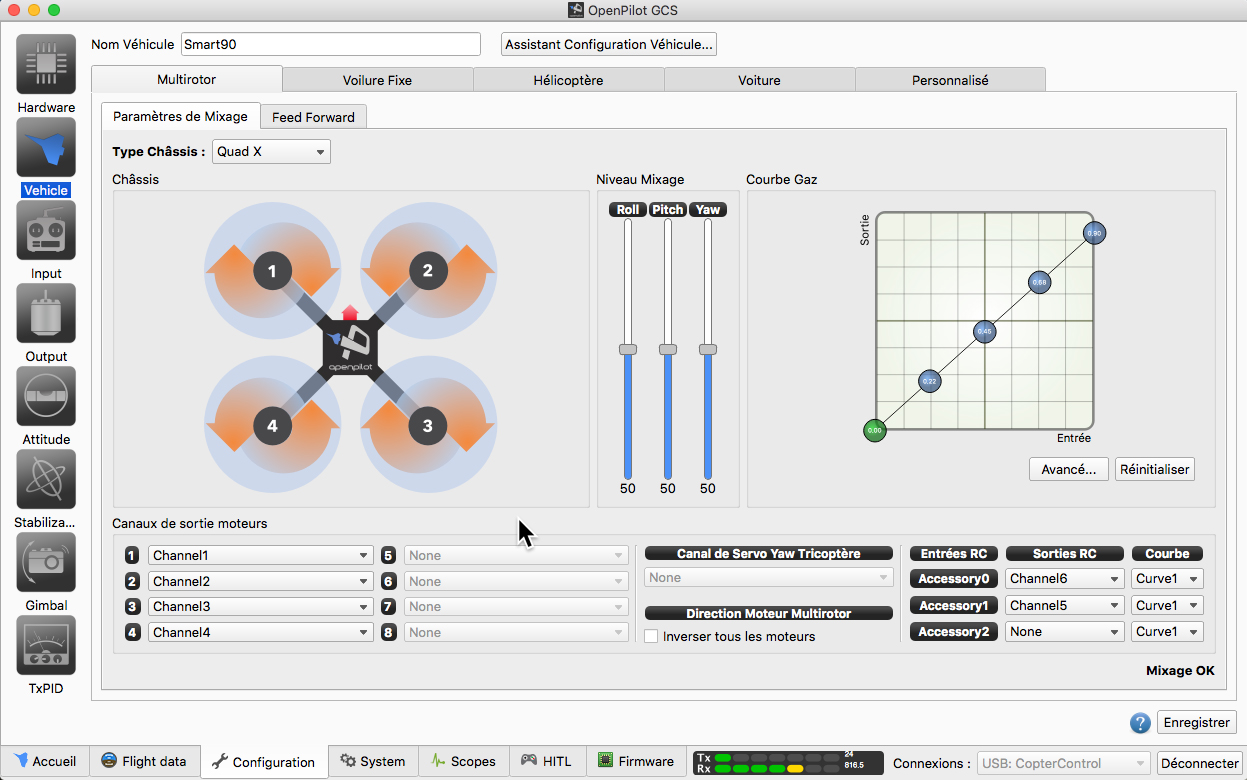
Le buzzer sur la plaque de distribution n’est pas très puissant en extérieur, on ne l’entend plus à une distance de 50 mètres environ. Mais en intérieur, le son est perçant. Pourquoi cette remarque ? Parce que ce buzzer se met à bipper au bout de… 30 secondes ! Pas 30 secondes d’inactivité, 30 secondes tout simplement, même en vol ! C’est tout simplement exaspérant quand on procède aux réglages, ou même sur le terrain.  Fort heureusement, il y a moyen de le faire taire. Il faut en fait que les joysticks de la radiocommande autres que les gaz puissent être considérés comme des événements par OpenPilot. Réglez les Accessory 0 et 1 comme sur les captures d’écran ci-dessous. Les bips cesseront tant que vous bougez les manches, mais recommenceront au bout de 30 secondes d’inactivité. C’est bien le but recherché – dommage que le son soit un peu faible pour que cela serve vraiment quand on le perd dans de hautes herbes. Notez que l’alarme de batterie se déclenche aussi très tôt : le buzzer bippe à partir de 6 minutes 30 de vol, alors que le Smart 190 vole encore 2 bonnes minutes de plus. Soit une autonomie d’environ 8 minutes et 30 secondes en vol « pépère ». Avec un pilotage plus agressif, l’autonomie descend sous les 6 minutes. Mais elle reste très correcte pour un appareil de ce type !
Fort heureusement, il y a moyen de le faire taire. Il faut en fait que les joysticks de la radiocommande autres que les gaz puissent être considérés comme des événements par OpenPilot. Réglez les Accessory 0 et 1 comme sur les captures d’écran ci-dessous. Les bips cesseront tant que vous bougez les manches, mais recommenceront au bout de 30 secondes d’inactivité. C’est bien le but recherché – dommage que le son soit un peu faible pour que cela serve vraiment quand on le perd dans de hautes herbes. Notez que l’alarme de batterie se déclenche aussi très tôt : le buzzer bippe à partir de 6 minutes 30 de vol, alors que le Smart 190 vole encore 2 bonnes minutes de plus. Soit une autonomie d’environ 8 minutes et 30 secondes en vol « pépère ». Avec un pilotage plus agressif, l’autonomie descend sous les 6 minutes. Mais elle reste très correcte pour un appareil de ce type !
Ajouter une caméra ?
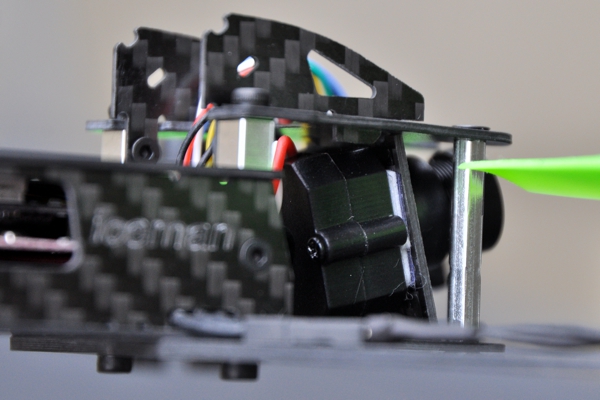 L’appareil est capable de porter une caméra HD de type Keychain. Le point positif, c’est que ce surpoids réduit un peu les oscillations de l’appareil ! Il faut avoir retiré les guides de la plate-forme avant pour qu’elle soit plate de telle sorte qu’elle puisse accueillir la caméra. Celle qui se prête le mieux à un usage avec le Smart 190 est la 808 #16 : c’est la plus légère. Avec les autres caméras, Mobius, Runcam, Runcam 2, Legend 1… et même Gopro 4, il est possible de voler, mais le surpoids rend le multirotor un peu pataud et diminue considérablement l’autonomie.
L’appareil est capable de porter une caméra HD de type Keychain. Le point positif, c’est que ce surpoids réduit un peu les oscillations de l’appareil ! Il faut avoir retiré les guides de la plate-forme avant pour qu’elle soit plate de telle sorte qu’elle puisse accueillir la caméra. Celle qui se prête le mieux à un usage avec le Smart 190 est la 808 #16 : c’est la plus légère. Avec les autres caméras, Mobius, Runcam, Runcam 2, Legend 1… et même Gopro 4, il est possible de voler, mais le surpoids rend le multirotor un peu pataud et diminue considérablement l’autonomie.
Cleanflight, Betaflight ?
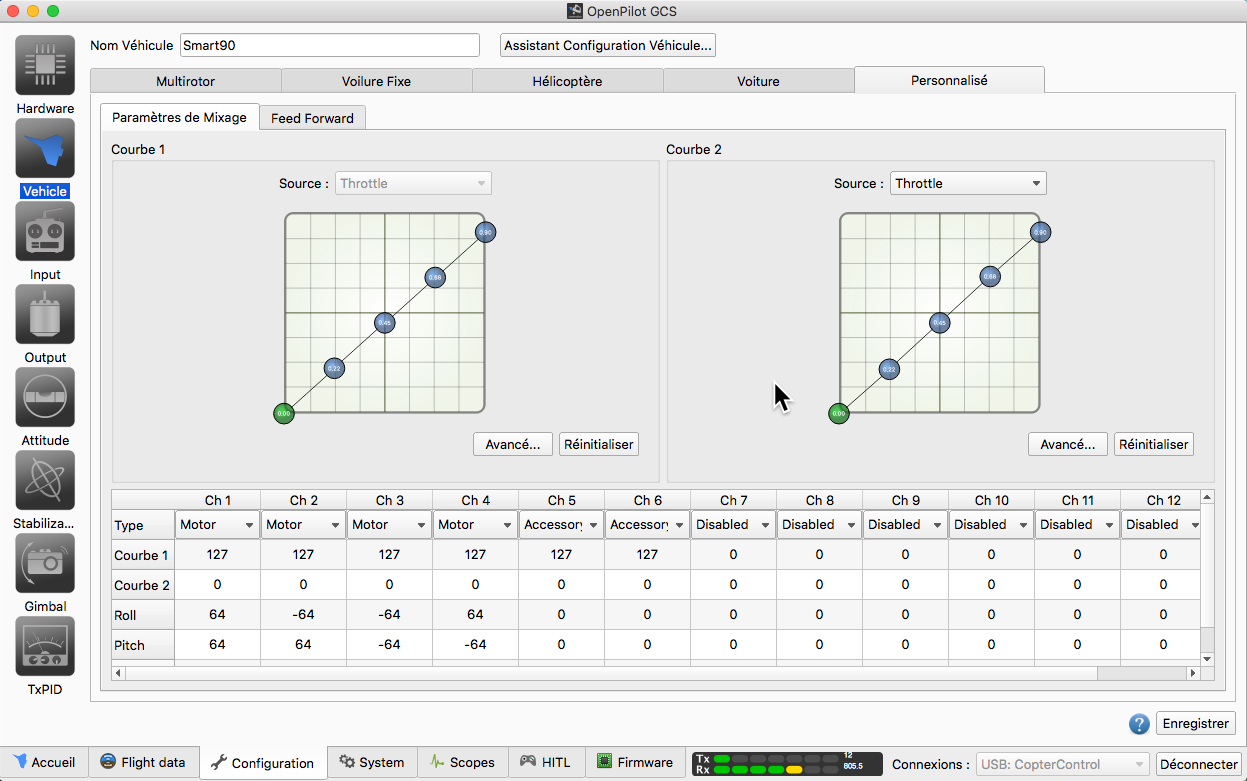
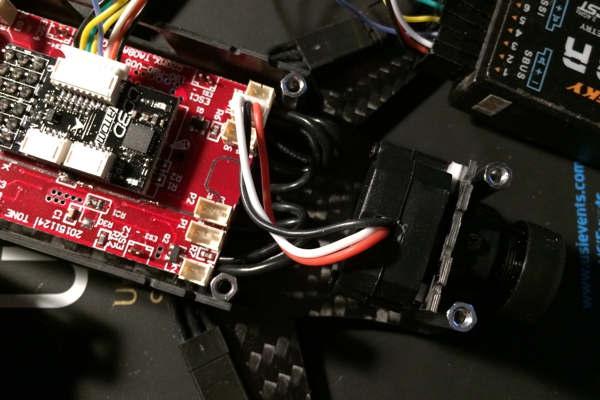 Il est possible de flasher le CC3D Atom en Cleanflight ou, mieux, en Betaflight. L’étape de flashage en elle-même ne pose pas de problème, mais les réglages sont plus complexes. La raison, c’est que la géométrie des moteurs est différente sous OpenPilot par rapport à Cleanflight et Betaflight. Or les pins correspondant aux moteurs sont directement soudés, entre l’Atom et la PDB. Résultat ? Il faut réattribuer les positions des moteurs et leur paramètres en passant par le CLI. C’est possible, par exemple en suivant les instructions de cette vidéo. Mais sachez que Cleanflight Configurator n’apprécie que moyennement la bidouille. A ne faire que si vous vous sentez suffisamment au point pour gérer le paramétrage… Cela dit, vous pouvez revenir à OpenPilot à tout moment – pensez à bien sauvegarder vos réglages une fois qu’ils sont satisfaisants.
Il est possible de flasher le CC3D Atom en Cleanflight ou, mieux, en Betaflight. L’étape de flashage en elle-même ne pose pas de problème, mais les réglages sont plus complexes. La raison, c’est que la géométrie des moteurs est différente sous OpenPilot par rapport à Cleanflight et Betaflight. Or les pins correspondant aux moteurs sont directement soudés, entre l’Atom et la PDB. Résultat ? Il faut réattribuer les positions des moteurs et leur paramètres en passant par le CLI. C’est possible, par exemple en suivant les instructions de cette vidéo. Mais sachez que Cleanflight Configurator n’apprécie que moyennement la bidouille. A ne faire que si vous vous sentez suffisamment au point pour gérer le paramétrage… Cela dit, vous pouvez revenir à OpenPilot à tout moment – pensez à bien sauvegarder vos réglages une fois qu’ils sont satisfaisants.
Vraiment sans soudure ?
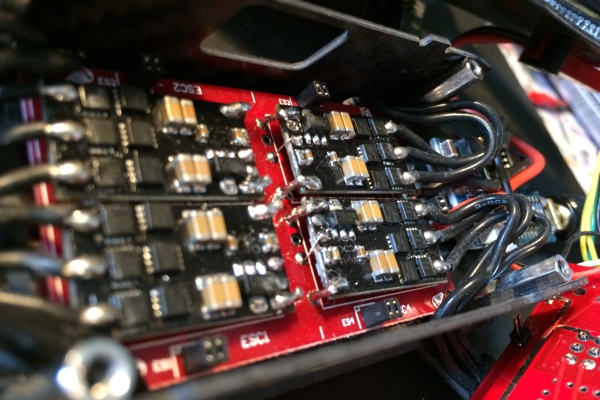 La manière dont est montée la machine permet en théorie de changer un moteur sans soudure, simplement en le dévissant et en le débranchant. Mais encore faut-il trouver des moteurs sous forme de pièces détachées ! Pour l’instant, nos recherches ont été infructueuses. A vrai dire, les moteurs sont proposés sur le site chinois Taobao, mais les acheter semble un parcours du combattant. Et si vous grillez un ESC ? Les retirer n’est pas simple du tout ! Là encore, rien n’est proposé à l’achat pour le remplacement. Ce que cela signifie ? En cas de composant défectueux, il faudra se débrouiller pour en trouver un équivalent et… le souder. Donc en sachant que ce l’on fait, avec un minimum de connaissances dans le bricolage d’un racer. Nous n’avons pas non plus trouvé de bras de rechange – or vu leur épaisseur réduite, il est probable qu’ils lâchent tôt ou tard sur un crash un peu plus dur que les autres.
La manière dont est montée la machine permet en théorie de changer un moteur sans soudure, simplement en le dévissant et en le débranchant. Mais encore faut-il trouver des moteurs sous forme de pièces détachées ! Pour l’instant, nos recherches ont été infructueuses. A vrai dire, les moteurs sont proposés sur le site chinois Taobao, mais les acheter semble un parcours du combattant. Et si vous grillez un ESC ? Les retirer n’est pas simple du tout ! Là encore, rien n’est proposé à l’achat pour le remplacement. Ce que cela signifie ? En cas de composant défectueux, il faudra se débrouiller pour en trouver un équivalent et… le souder. Donc en sachant que ce l’on fait, avec un minimum de connaissances dans le bricolage d’un racer. Nous n’avons pas non plus trouvé de bras de rechange – or vu leur épaisseur réduite, il est probable qu’ils lâchent tôt ou tard sur un crash un peu plus dur que les autres.
Faut-il l’acheter ?
 Le Smart 190 est plutôt séduisant, assez réussi, suffisamment petit pour accompagner une machine plus imposante sur vos spots de vol, et avec une belle autonomie. Il se comporte assez bien et peut faire office d’outil d’entrainement. Pour filmer, malheureusement, ce n’est pas le meilleur. Ce qui est dommage, c’est que sa promesse, être facile à réparer en cas de crash, n’est pour l’instant pas tenue par manque de pièces détachées. Dommage, parce qu’il pourrait être la machine parfaite pour ceux qui détestent bricoler ! Son prix est correct : il est vendu 150 € chez Banggood (avec le port mais hors taxes). Faut-il l’acheter ? Oui quand il y aura des pièces détachées disponibles. Mais pour l’instant, non, puisque sans elles il ne se distingue pas de la concurrence.
Le Smart 190 est plutôt séduisant, assez réussi, suffisamment petit pour accompagner une machine plus imposante sur vos spots de vol, et avec une belle autonomie. Il se comporte assez bien et peut faire office d’outil d’entrainement. Pour filmer, malheureusement, ce n’est pas le meilleur. Ce qui est dommage, c’est que sa promesse, être facile à réparer en cas de crash, n’est pour l’instant pas tenue par manque de pièces détachées. Dommage, parce qu’il pourrait être la machine parfaite pour ceux qui détestent bricoler ! Son prix est correct : il est vendu 150 € chez Banggood (avec le port mais hors taxes). Faut-il l’acheter ? Oui quand il y aura des pièces détachées disponibles. Mais pour l’instant, non, puisque sans elles il ne se distingue pas de la concurrence.
Crédits photos en vol : Janste
Une vidéo
D’autres photos




des prises servo pour les moteurs brushless c’est couillu… La première chose à faire pour éviter les ennuis sera de souder tout ça, faut savoir ce qu’on veut!
Ce type de connecteur n’a jamais été prévu pour passer plusieurs ampères !
Je me suis fait un petit racer : Diatone 160. Pour remplacer mon 250 dans les endroit ou il faut être plus discret. A l’opposé de ce que vous présentez, j’ai tout soudé. Le résultat est juste super. Les sensations au pilotages sont proches du 250, une puissance de dingue, la fiabilité est très bonne…
N’ayez pas peur des petits racers, ils sont surpuissant et très maniables.
@airvb ;: il t à la théorie et la réalité. J’ai un mini Helipal en 4s plug jst red. Ça fait 6 mois que ça tient des gaz à fond pendant 30 seconde alors que les pros en club m’avaient promis un incendie dans les permier vol.
Les connecteurs Uni sont donnés pour 5 A, en principe…
peut être une config low cost pas trop mal pour débuter à bas prix
voici un exemple de pack complet fpv:
Smart 190 arf 150€
4 lipos Turnigy nano-tech 1000mAh 4S 45~90C par 4 52€
Turnigy TGY-i6 AFHDS Transmitter and 6CH Receiver 47€
AOMWAY 5.8G 16€
quanum V2 59€
Turnigy nano-tech 1300mAh 3S 45~90C 13,50€
vrx Aomway RX004 DVR 5.8G 32CH 57€
antennes AOMWAY 5.8G 3dBi 15€
iMAX B6: 21€
Matek rgb LED 12v: 3€
total: 433€
à voir si ça marche pas trop mal avec les lipos 4S 45C 1000m
Merci pour le test Fred. J’étais a 2doigts de l’acheter jusqu’au mail de bup hobbyking avec le nouveau outlaw 180 plus petit avec des hélice 5pouces…
Petite question ? Il vol en 4s le smart 190 ? Sur les esc c’est écrit 2-4s.
J ai reçu ce truc et je peux vous dire qu il aura droit à un test inoubliable. C est honteux de vendre ça. Et je vais le prouver. Attention je ne remets pas le test de Fred n question. Je suis juste dcun autre avis
@ Diablomephisto : Non, pas de 4S…
@Fredouillo : tu vas maintenant publier des tests de machines que tu as vraiment entre les mains. C’est nouveau !!!
D’habitude tu fais des tests bidons basés uniquement sur ton imagination.
Si tu pouvais au moins éviter de polluer un site sérieux ce serait sympa.
Super test 🙂 J’ai publié aussi le mien
Par contre sur mon VTX, je n’ai mesuré que 100mW …. peut être un bug du mien… J’ai pas encore trouvé comment désactivé le buzzer sur Betaflight
Pour le courant de 5A des connecteurs cest en utilisation continue. Quand tu vole tu consomme peut moins etbde tant en tant avec quelque pointe bien au dessus mais ca depznd du pilotage et des moteurs. Mais ca reste pas recommandé. Du moins cest ce que jen pense.