INAV SITL : tester les fonctions de INAV avec un simulateur de vol !
 A quoi sert INAV Software In The Loop (SITL) ? C’est un outil développé par Andreas Kanzler qui permet d’utiliser un appareil virtuel sous INAV dans un simulateur de vol, sans disposer d’un contrôleur de vol. Le but est de se familiariser avec les nombreuses fonctions d’INAV sans risque de crash.
A quoi sert INAV Software In The Loop (SITL) ? C’est un outil développé par Andreas Kanzler qui permet d’utiliser un appareil virtuel sous INAV dans un simulateur de vol, sans disposer d’un contrôleur de vol. Le but est de se familiariser avec les nombreuses fonctions d’INAV sans risque de crash.
La description ?
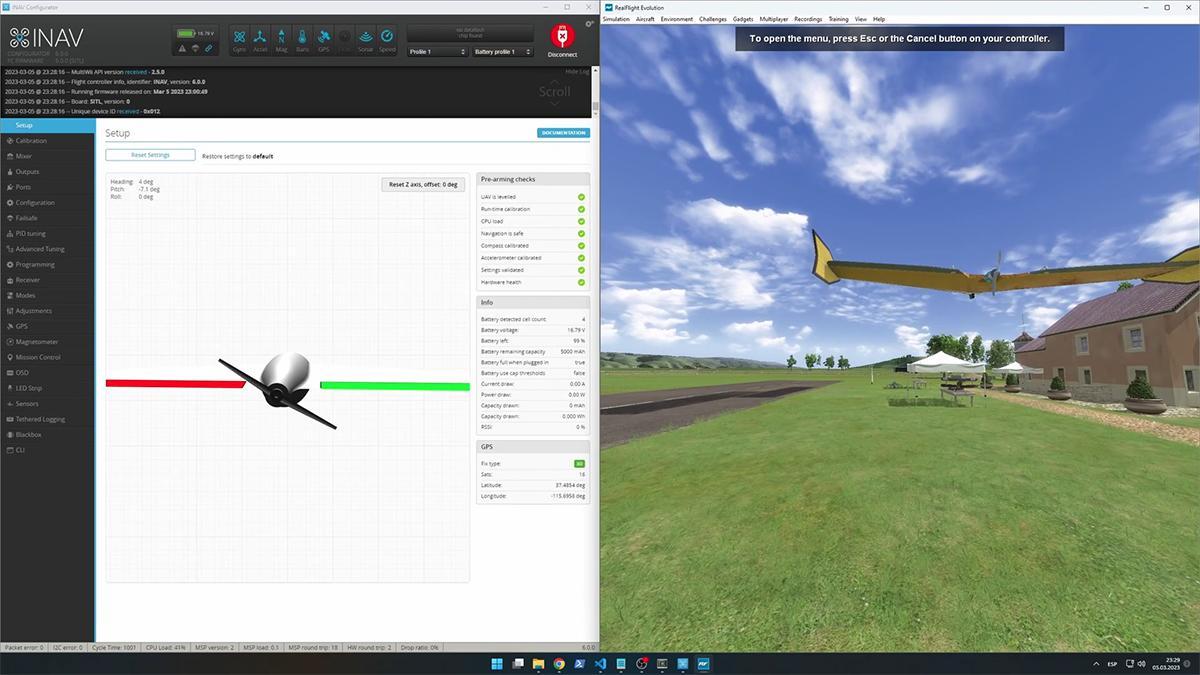
INAV SITL est proposé en version beta pour test (à télécharger ici). Il donne un aperçu de ce que sera la prochaine version de INAV Configurator, lequel inclura la fonction SITL dans une prochaine version si les tests sont concluants.  Cette fonction permet de simuler un contrôleur de vol avec ses capteurs (IMU, GPS, boussole, baromètre, sonde Pitot, etc) et d’injecter son comportement dans un simulateur de vol, avec le support d’un OSD HD et la prise en charge d’une radiocommande.
Cette fonction permet de simuler un contrôleur de vol avec ses capteurs (IMU, GPS, boussole, baromètre, sonde Pitot, etc) et d’injecter son comportement dans un simulateur de vol, avec le support d’un OSD HD et la prise en charge d’une radiocommande.
Compatibilité ?
Pour le moment, INAV SITL est compatible avec le simulateur de vol X-Plane v11 et v12 (l’éternel concurrent de Microsoft Flight Simulator) et RealFlight V9.5S et Evolution. Seuls les ailes volantes et les hélicos sont pris en charge pour le moment, en l’absence d’un simulateur de multirotor offrant des API pour être exploité par des applications tierces.


« en l’absence d’un simulateur de multirotor » hum il en existe un bon tas… D’ailleurs xplane et realflight le permettent… C’est juste qu’ils n’ont pas fait codé le support…
@ khancyr : C’est « en l’absence d’un simulateur de multirotor offrant des API », la phrase 😉
Pas de multirotors dans Realflight Evolution, et les multirotors dans X-Plane sont inexploitables (de la taille d’un appareil habité avec la physique en conséquence).
@ khancyr : : C’est « en l’absence d’un simulateur de multirotor offrant des API », la phrase 😉
Pas de multirotors dans Realflight Evolution, et les multirotors dans X-Plane sont inexploitables (de la taille d’un appareil habité avec la physique en conséquence).
@fred : https://ardupilot.org/dev/docs/sitl-with-realflight.html#using-sitl-with-realflight works with Realfight Evolution.
Le problème est plus avoir des modèles fonctionnels, les API sont la.
D’ailleurs si on regarde sur le Github, c’est bien coté INAV qu’il y a un problème, pas du coté des simulateur : https://github.com/iNavFlight/inav/pull/8731 . Ils n’ont pas encore codé la simulation pour le compass !
@ khancyr : Je ne suis pas sûr de te comprendre 😉
S’il y avait d’autres simus que Realflight Evolution et X-Plane avec des API, je dirais que les API sont là. Mais à ma connaissance, parmi les simus prévus pour les ailes et les racers, aucun ne propose d’API. Donc les API ne sont pas là !
@fred : Quelques simulateurs : AirSim (microsoft), Gazebo, Scrimmage, Morse, Webots, Isaac Sim (Nvidia). Aprés les moteurs de jeux sont aussi utilisable pour les drones : type Unity ou Godot qui est utilisé par BlueRobotics pour les ROV. Et il y en a d’autre, chacun avec ses avantages et défaults.
Je disais que le problème niveau multirotor est au niveau de INav pour l’instant pas des simulateurs externes. Il faut que INav puisse réccuppérer les données du simulateur externe et les faire passer pour des données réelles dans le code principale, c’est la tout le travail a faire. D’aprés l’avancement sur INav, leur simulation n’a pas encore de moyen de simuler les compass ce qui empèche d’utiliser la partie multirotor. En gros, ils ont les données du simulateur mais il faut les convertir pour que INAV les utilise.
Qu’appelles tu une API ? Parce qu’a partir du moment ou tu peux établir une connection avec un simulateur c’est que tu as une API et tu peux simuler à peu prés tout …
@ khancyr : Ok, je comprends mieux, tu places INAV dans un contexte industriel ou de développement. Mais ce dont je parle, ce sont des simulateurs pour s’entrainer à l’usage d’ailes ou de racers pour le loisir : c’est-à-dire le pilotage engagé. Lorsqu’INAV est utilisé à la place de Betaflight (je ne connais pas de pilote de racer en Ardupilot), c’est pour profiter de fonctions d’assistance, principalement aider au décollage et gérer le failsafe. Et donc les simulateurs pour ce type de vols, ce sont les Liftoff, Tryp FPV, Uncrashed, Zero Velocidrone, AI Drone Simulator, FPV Freerider, Zero-G racer… (et je ne connais pas de pilotes de racers qui s’entrainent avec d’autres simus que ceux-là).
Personne n’utilise plus FMS ?? 😀
@ JPH : Oh, souvenirs souvenirs 🙂