Projet Huuver : un drone hybride roulant et volant
 Huuver signifie Hybrid UAV-UGV for Efficient Relocation of Vessels. Ce qui signifie un véhicule hybride capable d’évoluer dans les airs et au sol avec des déplacements efficaces. Il s’agit d’un projet mené par 7 entités de 5 pays de l’Union Européenne : Cervi Robotics-Dronehub group (Pologne), RECTANGLE (Pologne), LUT University (Finlande), Everis (Espagne), GINA Software (République Tchèque), BLADESCAPE (Autriche) and Brimatech Services (Autriche). Il a été subventionné par le programme d’innovation et de recherche Horizon 2020 de l’Union Européenne.
Huuver signifie Hybrid UAV-UGV for Efficient Relocation of Vessels. Ce qui signifie un véhicule hybride capable d’évoluer dans les airs et au sol avec des déplacements efficaces. Il s’agit d’un projet mené par 7 entités de 5 pays de l’Union Européenne : Cervi Robotics-Dronehub group (Pologne), RECTANGLE (Pologne), LUT University (Finlande), Everis (Espagne), GINA Software (République Tchèque), BLADESCAPE (Autriche) and Brimatech Services (Autriche). Il a été subventionné par le programme d’innovation et de recherche Horizon 2020 de l’Union Européenne.
C’est quoi ?
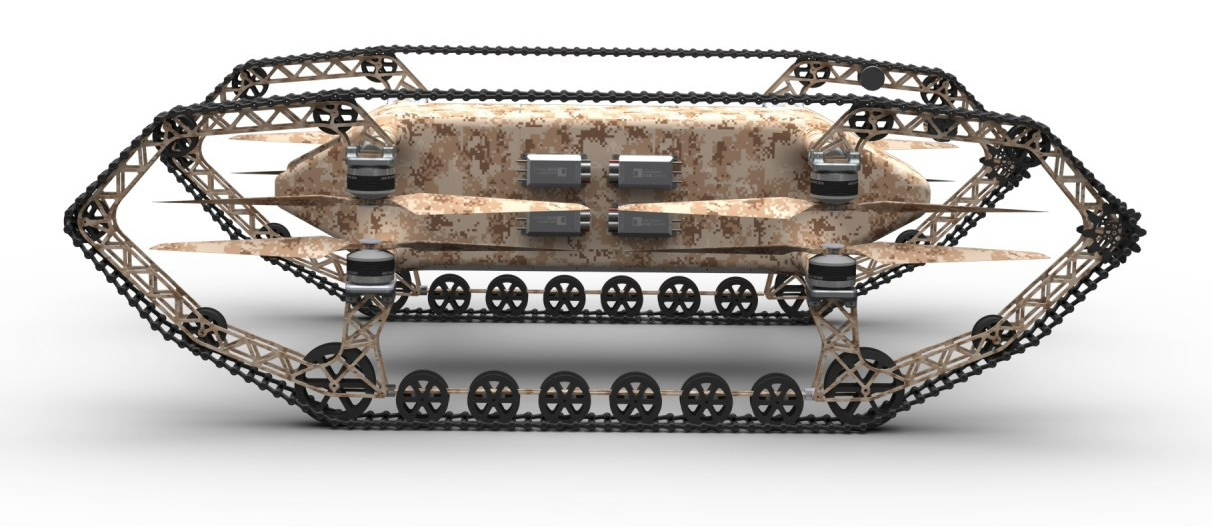 Le Huuver est un véhicule piloté à distance qui progresse au sol dans des environnements qui peuvent être difficiles et encombrés. Lorsqu’ils le sont trop, il a la possibilité d’actionner 8 moteurs et leurs hélices pour décoller et passer les obstacles. Les mouvements au sol sont peu gourmands en énergie, ceux en l’air le sont beaucoup plus, et se trouvent donc réservés aux situations où passer par les airs constitue la seule alternative.
Le Huuver est un véhicule piloté à distance qui progresse au sol dans des environnements qui peuvent être difficiles et encombrés. Lorsqu’ils le sont trop, il a la possibilité d’actionner 8 moteurs et leurs hélices pour décoller et passer les obstacles. Les mouvements au sol sont peu gourmands en énergie, ceux en l’air le sont beaucoup plus, et se trouvent donc réservés aux situations où passer par les airs constitue la seule alternative.
Pour quoi faire ?
 Le Huuver est destiné à des missions de secours (Search And Rescue SAR) là où les moyens terrestres et aériens conventionnels sont complexes à déployer, par exemple après une catastrophe naturelle, ou dans des environnements instables où la présence humaine doit être évitée. Des simulations d’incidents ont placé le Huuver dans un scénario de recherche de personnes en montagne et dans une forêt, dans une mission de surveillance de centrale nucléaire, d’un site industriel (voir ici).
Le Huuver est destiné à des missions de secours (Search And Rescue SAR) là où les moyens terrestres et aériens conventionnels sont complexes à déployer, par exemple après une catastrophe naturelle, ou dans des environnements instables où la présence humaine doit être évitée. Des simulations d’incidents ont placé le Huuver dans un scénario de recherche de personnes en montagne et dans une forêt, dans une mission de surveillance de centrale nucléaire, d’un site industriel (voir ici).
Le prototypage
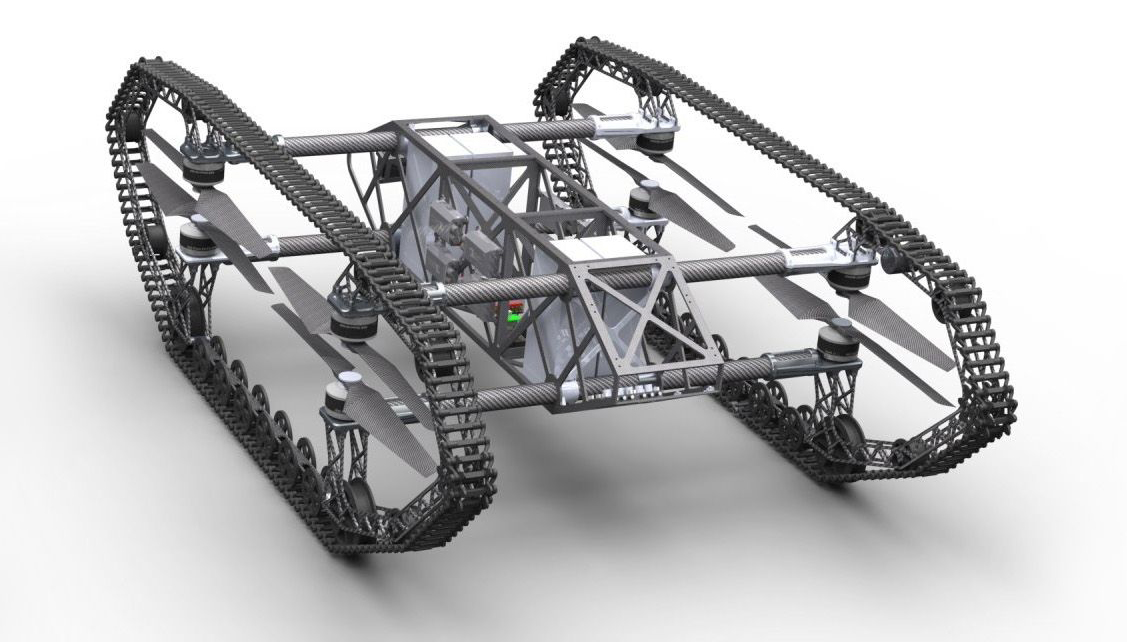
 Il a été documenté dans le cadre de la surveillance du projet, avec la genèse complète de l’engin consultable dans un document (voir ici). Le prototype est équipé en ArduPilot, il dispose d’un module de positionnement satellite basé sur Galileo (projet européen oblige). Il pèse 22 kilos en ordre de roulage et de vol. Son autonomie au sol est de 5 heures, celle en vol est de 27 minutes. Il est pilotable depuis un smartphone iOS ou Android.
Il a été documenté dans le cadre de la surveillance du projet, avec la genèse complète de l’engin consultable dans un document (voir ici). Le prototype est équipé en ArduPilot, il dispose d’un module de positionnement satellite basé sur Galileo (projet européen oblige). Il pèse 22 kilos en ordre de roulage et de vol. Son autonomie au sol est de 5 heures, celle en vol est de 27 minutes. Il est pilotable depuis un smartphone iOS ou Android.
Quand ?
 Il est encore trop tôt pour se procurer le Huuver : il est en phase de développement, avec de gros travaux menés sur l’intégration de l’appareil dans l’espace aérien U-Space sans ségrégation avec l’aviation générale. Le projet Huuver est à suivre sur son site officiel, ici. Notez que le projet reprend le principe du Xerall, un drone de loisir destiné au grand public et imaginé par Witold Mielniczek (voir ici).
Il est encore trop tôt pour se procurer le Huuver : il est en phase de développement, avec de gros travaux menés sur l’intégration de l’appareil dans l’espace aérien U-Space sans ségrégation avec l’aviation générale. Le projet Huuver est à suivre sur son site officiel, ici. Notez que le projet reprend le principe du Xerall, un drone de loisir destiné au grand public et imaginé par Witold Mielniczek (voir ici).


Ce qui est bien avec les petits robot hybride comme ça, c’est ceux sont ni des bon drone volants, ni des bons drones roulants !
Après le defi technique est intéressant.
Source pour l’utilisation d’ArduPilot ? Le document ne présente qu’une analyse vibratoire avec ArduPilot ce qui est assez commun.